一种基于LMD-TCN的激光雷达低空小尺度风切变区域告警方法
本发明涉及激光雷达应用,具体为一种基于lmd-tcn的激光雷达低空小尺度风切变区域告警方法。
背景技术:
1、天气情况会直接影响飞机飞行的安全与效率,风切变尤其是低空风切变是飞机飞行过程中最需注意的天气状况之一,是大气中的一种现象,是风在空间中的一种变化,其具有变化速度快、作用空间小、影响强度大的特点。飞机在其降落过程中有时会遇到风切变的干扰,由于此时飞机具有飞行高度低、操控难度高、稳定性下降等特点,因此很容易发生机毁人亡的事故,所以低空风切变的危害很大,给飞机的起飞降落阶段带来了巨大的威胁。
2、目前我国各个机场多用多普勒测风激光雷达来探测风切变,其原理是通过对低空气溶胶等示踪物的相干检测,来实现对低空大气风场的快速三维测量,对低空风切变,局地的小尺度风切变具有良好的探测效果,是目前机场中识别低空风切变最有效的手段,但是由于各个机场的所在海拔高度,所处地理环境各不相同,所以不免会出现告警发布准确率低,虚警率高的问题;之前陈柏纬利,赵丽艳,熊兴隆等人都公开过多种进行风切变告警的方法,但是这些风切变告警方法存在需要大量数据集,大量实验进行验证等问题。
技术实现思路
1、本发明的目的在于提供一种基于lmd-tcn的激光雷达低空小尺度风切变区域告警方法,以解决上述背景技术中所提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于lmd-tcn的激光雷达低空小尺度风切变区域告警方法,其特征在于:包括以下步骤:
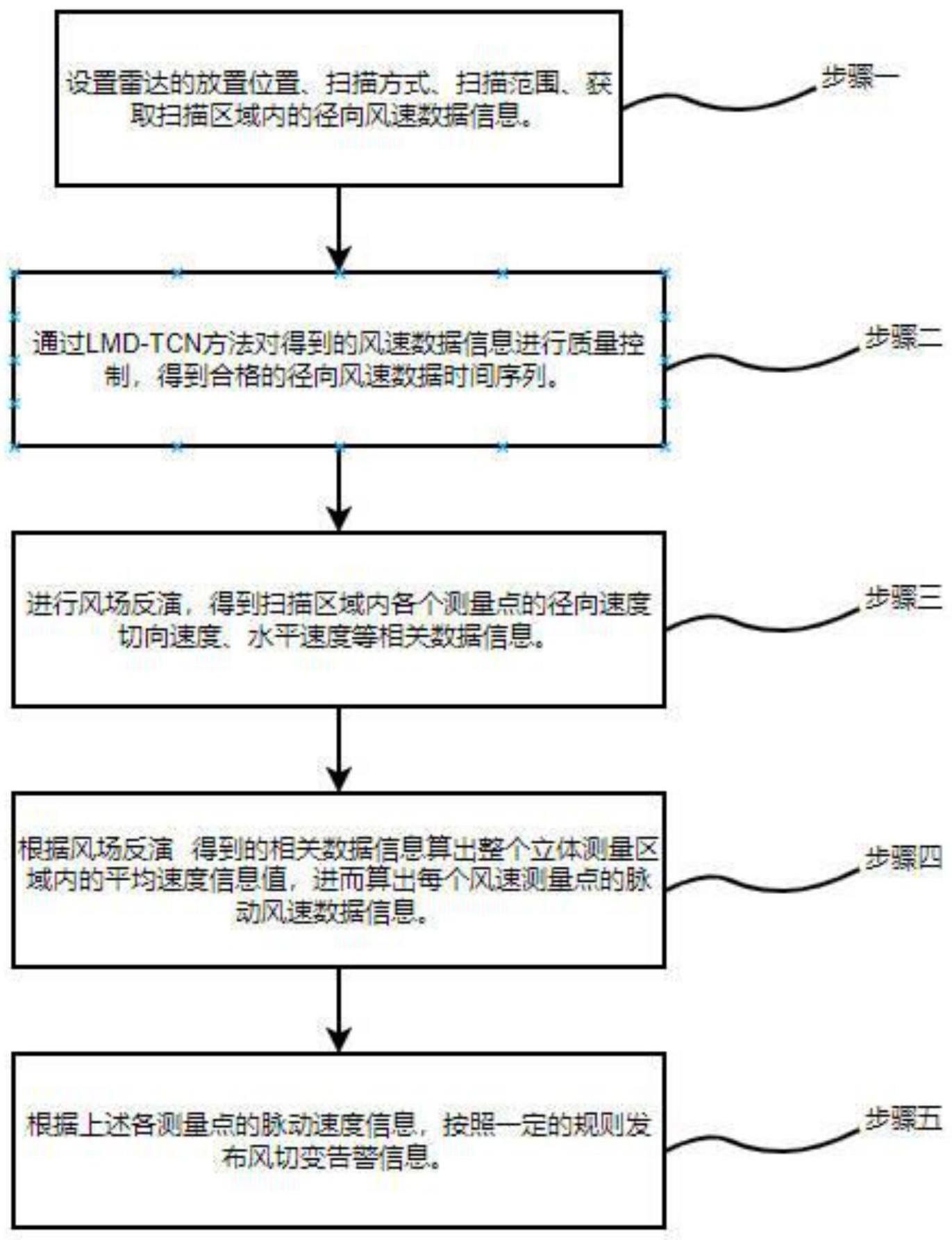
3、步骤一:设定测风激光雷达的放置位置、扫描方式、扫描范围,利用测风激光雷达对规定的下滑道扫描区域进行扫描,获得扫描区域内的径向风速数据信息。
4、步骤二:通过lmd-tcn方法对风速数据信息进行质量控制,质量控制后得到合格的径向风速数据时间序列。
5、步骤三:进行风场的反演,得到扫描区域内各个测量点的径向速度,切向速度,水平速度等相关数据信息。
6、步骤四:根据风场反演得到的相关数据信息,算出整个立体测量区域内的平均速度信息值,进而算出每个风速测量点的脉动风速数据信息。
7、步骤五:根据上述各测量点的脉动速度信息,按照一定的规则发布风切变的告警信息。
8、优选的,设定测风激光雷达的设置位置、扫描范围方法是将测风激光雷达部署在飞机降落跑道中心点高200m处,扫描方式为ppi扫描,扫描区域需对飞机的下滑道形成立体式的完全覆盖,扫描角度为φ,φ=1、3、35,三个高度角,扫描区域以雷达为原点覆盖的半径为10n mile(18520m),覆盖的区域为水平方向上覆盖跑道中心线左右8°的区域内,形成一个垂直扫描角度覆盖范围为34°,水平扫描角度范围为16°的立体式下滑道扫描区域,通过扫描区域内的各个扫描点得到区域内的径向风速数据值,记录下一段时间内的径向风速数据值数据。
9、优选的,步骤二中对风速数据进行质量控制,质量控制后得到合格的径向风速数据矩阵具体步骤是:
10、从扫描得到的径向风速数据中进行基本质量控制选取,得到其中的风速时间序列x(t),t=1,2,…n;
11、通过lmd分析方法对风速时间序列x(t)进行分解,分解得到主要的ml序列和残留的rl序列,其中ml序列数量为k个,rl序列数量为1个,分解式子如下:
12、
13、其中lmd(local mean decomposition,局域均值分解)是一种非平稳信号的处理方法,方法过程是将一个非平稳的多分量信号分解为若干个乘积函数分量序列ml,其中每一个ml分量由一个包络信号和一个纯调频信号直接求出,包络信号是该分量的顺势幅值,纯调频信号可以求出一个瞬时频率,将所有ml分量序列的瞬时幅值和瞬时频率相组合,就可以得到原始信号的完整的时频分布信号;
14、对上述过程得到的两种时间序列分别建立tcn时间模型,利用网格搜索对模型的超参数进行寻优,从而得到最佳的时间模型;
15、其中tcn(temporal convolutional network,时间卷积网络)是将卷积神经网络应用于处理时间序列数据的一种新方法;
16、将各个tcn时间模型寻优后得到的最佳时间模型进行叠加,得到最终需要的总风速序列预测模型tl;
17、利用特定的评价指标来评估所建模型的预测精度;
18、将lmd-tcn方法得到的总预测模型tl与插入随机误差后的观测序列模型tl′进行对比,若两者之间的差值不满足下式,则认为数据为可疑值;
19、|t1′(i)-tl(i)|≤f*a
20、其中f为质控参数,a为观测序列模型tl′的标准差;
21、将可疑值去掉,得到质量控制之后的径向风速数据序列enl。
22、优选的,步骤三中进行风场的反演,得到扫描区域内各个测量点的径向速度,切向速度,水平速度等相关数据信息,风场反演步骤是:
23、建立两个坐标系,第一个坐标系以激光雷达的位置为原点用平直的方式来描述径向风速测量点的位置,用(x,y,z)来表示,第二个坐标系以激光雷达的位置为原点用球形的方式来描述风速测量点距离,用(r,φ,θ)来表示;
24、其中x表示为风速测量点距离机场跑道垂直方向上的距离,y表示为测量点距离机场跑道平行方向上的距离,z为测量点距离机场跑道地面的距离,φ表示为激光雷达的高度角,θ表示为激光雷达扫描的方位角,r表示为风速测量点到激光雷达的距离长度;
25、设一个分析单元(u,v,w),单元中心点速度为(u0,v0,w0),u0表示径向速度,v0表示水平切向速度,w0表示u0,v0所在平面法向的垂直速度;
26、对于较小尺度的分析单元,可以认为单元内所有速度相等,则分析单元内任一点q(φi,θj,rk)的径向速度v(φi,θj,rk)与中心点风速在其径向上的风速投影f(φi,θj,rk)可以用式(1)来表示;
27、对于较大尺度的分析单元,第一步需要使分析单元内观测到的径向风场v(φi,θj,rk)与各径向的投影风场f(φi,θj,rk)之间差的平方和最小,第二步分别关于v0,w0作变分处理,处理之后u0,v0,w0的表达式就可以用式(2)(3)(4)来表示,最终将反演速度转为笛卡尔坐标系中的速度(u,v,w);
28、(1):
29、f(φi,θj,rk)=u[cosφlcosφicos(θm-θj)+sinφlsinφi]-v cosφisin(θm-θj)+w[cosφlsinφi-sinφlcosφicos(θm-θj)];
30、(2):u0=v(φ0,θ0,r0);
31、(3):
32、(4):
33、其中
34、优选的,步骤四中根据风场反演得到的相关数据信息,对整个空间中的数据进行立体空间平均,算出整个立体测量区域内的平均速度信息值,进而算出每个风速测量点的脉动风速数据信息,具体步骤是:
35、将笛卡尔坐标系中的所有点的径向风速拟合到一个立体空间中,对立体空间进行空间平均,得到空间平均径向风速值,设其方程表达式为:
36、vave(u,v,w)=b0u+b1v+b2w+b3
37、即每个点都有一个径向风速值vi;
38、设法求出未知数b0、b1,b2,b3,即要使平均径向风速值和每个径向风速点风速度值之差的平方和值s最小,如下式所示:
39、
40、根据最小平方法,要使得s值最小应满足对各个参数求偏导等于0即:
41、
42、∑2u(b0u+b1v+b2w+b3-vi)=0
43、∑2v(b0u+b1v+b2w+b3-vi)=0
44、∑2w(b0u+b1v+b2w+b3-vi)=0
45、∑2(b0u+b1v+b2w+b3-vi)=0
46、联立以上四个方程组即可求得平面方程中的未知数b0、b1,b2,b3,
47、最终求得脉动速度v′(u,v,w)
48、vi′(u,v,w)=vi(u,v,w)-vave(u,v,w)。
49、优选的,步骤五中所述根据上述各测量点的脉动速度信息,按照一定的规则发布风切变的告警信息,方法是根据上一步求出的脉动速度,可以得到下滑道扫描区域内的风速的变化趋势,通过该变化趋势来判断该下滑道立体风速测量区域内是否发生了小尺度风切变,从而实现风切变告警。
50、与现有技术相比,本发明的有益效果是:
51、通过lmd-tcn方法可以去除径向风速数据中的异值点,再通过风场的反演和风场内脉动速度值的计算,改善了低空风切变发布准确率低,虚警率高的问题,对风切变的告警提供了新的思路。
- 还没有人留言评论。精彩留言会获得点赞!