一种风洞六分量天平静校系统中复位机构的复位方法与流程
本发明涉及风洞试验领域,具体地,涉及一种风洞六分量天平静校系统中复位机构的复位方法。
背景技术:
1、天平是测量风洞试验过程中作用在模型上的气动力和力矩的核心测量元件,它的精准度关系到试验数据的准确性以及整个吹风试验的成败。因此,在天平应用于风洞测力试验之前,必须在校准装置上施加一组已知载荷并测定其对应的应变量,确定出它在一定轴系中的校准公式和工作公式。
2、风洞六分量天平静校系统的目的是满足风洞所用常规六分量(阻力、升力、侧向力、俯仰力矩、滚转力矩和偏航力矩),及六分量以下应变天平静态校准的应用需要,获得相应天平静校公式、静校精度和准度,并提供天平支杆弹性角修正公式。风洞六分量天平静校系统组由6自由度复位机构、自动加载机构、测位机构、天平支杆、天平加载头以及基座6大部分组成。6自由度复位机构主要用于天平加载后、将天平加载头复位至初始位置;自动加载机构用于根据校准要求,为天平加载头自动加载所需的力和力矩;测位机构主要用于测量天平加载头的实时位置和姿态,为6自由度复位机构的复位操作提供依据;天平支杆主要用于连接6自由度复位机构和天平加载头,与天平在风洞中实际使用的相同;天平加载头主要用于实现天平校准过程中的力和力矩的有效加载;基座用于保证天平校准设备的工作状态稳定。
3、天平在校准过程中,根据不同的校准方法,对天平进行单分量、二元或综合校准,天平加载后,加载头会在俯仰α、偏航β、滚转γ、x、y、z各个方向产生不同程度的变形,根据回零式天平校准装置的校准方法,需由天平复位机构将加载头复位至初始状态后,获取天平在该状态下的输出,最终得到天平校准结果。
4、在风洞六分量天平静校系统的工作过程中,天平复位机构的复位精度,直接影响着天平的静态校准精度,进而影响风洞试验数据的精度,而天平复位机构的复位效率,直接影响天平复位机构完成复位所能达到的精度和效率。因此,天平复位机构的复位控制方法显得尤为重要。
5、现有技术中风洞六分量天平静校系统中复位机构的复位方法为:根据现场情况由工作人员经验进行复位,不同的人员复位精度和效率均有差异,且效率较低。
技术实现思路
1、本发明目的是提高风洞六分量天平静校系统中复位机构的复位效率。
2、申请人研究发现由于机械加工和结构安装误差,导致复位机构在运行过程中,各分量运动关系存在相互耦合,根据耦合关系的强弱,对于串联结构的天平复位机构,不同的复位顺序运行效率有所不同,因此,申请人想到通过获得最佳复位顺序进行复位能够有效提高复位的效率。
3、为实现上述发明目的,本发明提供了一种风洞六分量天平静校系统中复位机构的复位方法,复位机构为俯仰角α、偏航角β和滚转角γ三个角度及x轴、y轴和z轴三个方向的6自由度复位机构,所述方法包括:
4、步骤1:基于俯仰角α、偏航角β、滚转角γ、x轴、y轴和z轴的随机排序组合,生成若干个复位机构的复位顺序,对若干个复位机构的复位顺序进行仿真,基于仿真结果确定复位机构的最佳复位顺序;
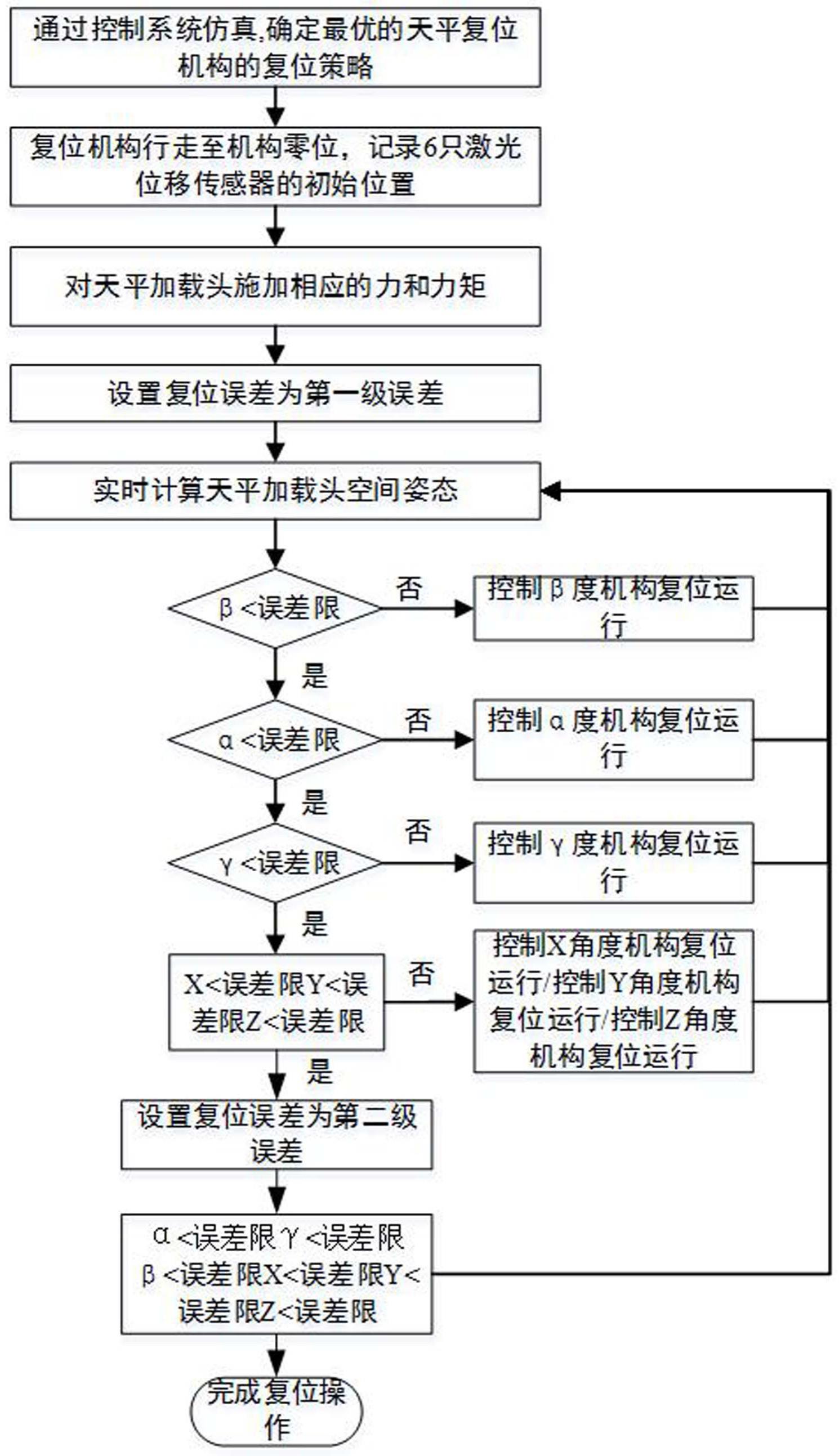
5、步骤2:安装风洞六分量天平静校系统,将风洞六分量天平静校系统中的复位机构行走至机构零位,记录风洞六分量天平静校系统中激光位移传感器的初始位置,获得初始位置数据;
6、步骤3:对风洞六分量天平静校系统中的加载头施加相应的力和力矩;
7、步骤4:设置第一角度复位误差范围和第一位移误差范围;
8、步骤5:利用风洞六分量天平静校系统中激光位移传感器的实时位置数据和初始位置数据计算获得加载头的偏航角β变形量;
9、步骤6:若偏航角β变形量大于第一角度复位误差范围,则执行步骤7,若偏航角β变形量小于第一角度复位误差范围,则执行步骤8;
10、步骤7:基于最佳复位顺序和偏航角β变形量,控制复位机构执行加载头的偏航角β复位,并返回执行步骤5;
11、步骤8:利用风洞六分量天平静校系统中激光位移传感器的实时位置数据和初始位置数据计算获得加载头的俯仰角α变形量;若俯仰角α变形量大于第一角度复位误差范围,则执行步骤9,若俯仰角α变形量小于第一角度复位误差范围,则执行步骤10;
12、步骤9:基于最佳复位顺序和俯仰角α变形量,控制复位机构执行加载头的俯仰角α复位,并返回执行步骤5;
13、步骤10:利用风洞六分量天平静校系统中激光位移传感器的实时位置数据和初始位置数据计算获得加载头的滚转角γ变形量;若滚转角γ变形量大于第一角度复位误差范围,则执行步骤11,若滚转角γ变形量小于第一角度复位误差范围,则执行步骤12;
14、步骤11:基于最佳复位顺序和滚转角γ变形量,控制复位机构执行加载头的滚转角γ复位,并返回执行步骤5;
15、步骤12:复位机构完成偏航角β、俯仰角α和滚转角γ的复位后,利用风洞六分量天平静校系统中激光位移传感器的实时位置数据和初始位置数据计算获得加载头在x轴、y轴以及z轴方向的位移变形量;若加载头在x轴、y轴以及z轴方向的位移变形量均大于第一位移误差范围,则执行步骤13,若加载头在x轴、y轴以及z轴方向的位移变形量均小于第一位移误差范围,则执行步骤14;
16、步骤13:基于最佳复位顺序和加载头在x轴、y轴以及z轴方向的位移变形量,控制复位机构执行加载头在x轴、y轴以及z轴方向的位移复位,并返回执行步骤5;
17、步骤14:设置第二角度复位误差范围和第二位移误差范围,第二角度复位误差范围小于第一角度复位误差范围,第二位移误差范围小于第一位移误差范围;
18、步骤15:判断偏航角β变形量、俯仰角α变形量和滚转角γ变形量是否均小于第二角度复位误差范围且加载头在x轴、y轴以及z轴方向的位移变形量是否均小于第二位移误差范围,若是则完成复位机构的复位操作,若否则返回执行步骤5。
19、其中,本发明提出的风洞六分量天平静校系统中复位机构的复位方法中,通过2种技术手段提高天平复位机构的复位控制效率。第一种技术手段为:在复位策略的调试过程中,通过仿真软件,根据机构的实际材料等结构参数,对不同机构复位顺序进行仿真,根据仿真复位执行时间,确定最优的天平复位机构的复位策略。第二种技术手段是在复位过程中,采用2级精度的控制方法,在初始复位阶段,采用误差较大的第一级误差(第一角度复位误差范围和第一位移误差范围)限控制机构实现粗复位,待机构复位满足第一级误差限后,采用精度较高的第二级误差(第二角度复位误差范围和第二位移误差范围)限控制复位,相比只用一级误差限的复位效率有明显的提高。
20、优选的,所述步骤1具体包括:基于俯仰角α、偏航角β、滚转角γ、x轴、y轴和z轴的随机排序组合,生成若干个复位机构的复位顺序;基于复位机构的材料参数和结构参数,采用仿真软件对生成的若干个复位机构的复位顺序进行仿真获得仿真结果,基于仿真结果中仿真复位执行时间大小,确定复位机构的最佳复位顺序。
21、优选的,风洞六分量天平静校系统中包括6个激光位移传感器,分别是:用于测量偏航角β变形量、俯仰角α变形量以及x轴方向位移变形量的激光位移传感器p1,用于测量偏航角β变形量、俯仰角α变形量以及x轴方向位移变形量的激光位移传感器p2,用于测量俯仰角α变形量以及x轴方向位移变形量的激光位移传感器p3,用于测量滚转角γ变形量以及y轴方向位移变形量的激光位移传感器p4,用于测量滚转角γ变形量以及y轴方向位移变形量的激光位移传感器p5,用于测量z轴方向位移变形量的激光位移传感器p6。
22、优选的,采用p1和p2两个激光位移传感器进行测量,为提高计算效率,对偏航角β计算进行了简化,仅考虑加载头在偏航角β方向的变化量。最终复位完成时,加载头的各个角度和位移均复位至初始值误差范围内,完成复位,偏航角β变形量采用以下方式进行计算:
23、通过激光位移传感器p1的初始位置数据和实时位置数据,计算获得激光位移传感器p1的位移变化量;
24、通过激光位移传感器p2的初始位置数据和实时位置数据,计算获得激光位移传感器p2的位移变化量;
25、基于激光位移传感器p1的位移变化量和激光位移传感器p2的位移变化量,计算获得第一平均位移变化量;
26、基于激光位移传感器p1与激光位移传感器p2之间的安装距离和所述第一平均位移变化量计算获得偏航角β变形量。
27、优选的,激光位移传感器p1与激光位移传感器p2之间的安装距离为l1,第一平均位移变化量为dl,偏航角β变形量=arctan(d1/l1)。
28、优选的,俯仰角α测量通过p1、p2和p3三个激光位移传感器进行测量,p1、p2水平安装,用于测量偏航角β,p1、p2和p3安装均与变形测位平面垂直,p3安装与p1、p2下方,与p1、p2形成等腰三角形,俯仰角α变形量采用以下方式进行计算:
29、通过激光位移传感器p1的初始位置数据和激光位移传感器p2的初始位置数据,获得激光位移传感器p1与激光位移传感器p2之间连线中点的初始位置数据;
30、通过激光位移传感器p1的实时位置数据和激光位移传感器p2的实时位置数据,获得激光位移传感器p1与激光位移传感器p2之间连线中点的实时位置数据;
31、基于激光位移传感器p1与激光位移传感器p2之间连线中点的初始位置数据与实时位置数据,计算获得激光位移传感器p1与激光位移传感器p2之间连线中点的位移变化量;
32、通过激光位移传感器p3的初始位置数据和实时位置数据,计算获得激光位移传感器p3的位移变化量;
33、基于激光位移传感器p1与激光位移传感器p2之间连线中点的位移变化量以及激光位移传感器p3的位移变化量,计算获得第二平均位移变化量;
34、基于激光位移传感器p1与激光位移传感器p2之间连线到激光位移传感器p3的距离和所述第二平均位移变化量计算获得俯仰角α变形量。
35、优选的,激光位移传感器p1与激光位移传感器p2之间连线到激光位移传感器p3的距离为l2,第二平均位移变化量为d2,俯仰角α变形量=arctan(d2/l2)。
36、优选的,滚转角γ变形量通过p4、p5两个激光位移传感器进行测量,p4、p5垂直与测位面上表面安装。变形量计算方法与偏航角β计算方法相同,滚转角γ变形量采用以下方式进行计算:
37、通过激光位移传感器p4的初始位置数据和实时位置数据,计算获得激光位移传感器p4的位移变化量;
38、通过激光位移传感器p5的初始位置数据和实时位置数据,计算获得激光位移传感器p5的位移变化量;
39、基于激光位移传感器p4的位移变化量和激光位移传感器p5的位移变化量,计算获得第三平均位移变化量;
40、基于激光位移传感器p4与激光位移传感器p5之间的安装距离和所述第三平均位移变化量计算获得滚转角γ变形量。
41、优选的,激光位移传感器p4与激光位移传感器p5之间的安装距离为l3,第三平均位移变化量为d3,滚转角γ变形量=arctan(d3/l3)。
42、优选的,x轴、y轴以及z轴方向的位移变形量分别采用以下方式进行计算:
43、通过激光位移传感器p1至p6各自的初始位置数据和实时位置数据,分别计算获得激光位移传感器p1至p6各自的位移变化量;
44、将激光位移传感器p1至p3的位移变化量求平均获得x轴方向的位移变形量;
45、将激光位移传感器p4至p5的位移变化量求平均获得y轴方向的位移变形量;
46、激光位移传感器p6的位移变化量为z轴方向的位移变形量。
47、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
48、本发明所涉及到的风洞六分量天平静校系统中复位机构的复位方法,通过2种途径提高天平复位机构的控制效率。首先,在复位策略的调试过程中,通过仿真软件,根据机构的实际材料等结构参数,对不同机构复位顺序进行仿真,根据仿真复位执行时间,确定最优的天平复位机构的复位策略,避免了采用其他不佳的或效率低的复位顺序进行复位,也避免了采用人工经验确定复位顺序,从整体上提高了复位效率。第二,在复位过程中,采用2级精度分步控制的方法,在初始复位阶段,采用误差较大的第一级误差限控制机构实现粗复位,待机构复位满足第一级误差限后,采用精度较高的第二级误差限控制复位。该复位方法,通过机械仿真,有效降低了复位机构运动耦合对复位效率的影响,同时,通过2级精度分步控制,明显提高了机构的复位效率。
- 还没有人留言评论。精彩留言会获得点赞!