一种预应力结构孔道压浆密实度插值成像检测方法与流程
本发明涉及混凝土结构内部缺陷检测,尤其涉及一种预应力结构孔道压浆密实度插值成像检测方法。
背景技术:
1、预应力结构孔道压浆是将预应力结构技术和孔道压浆技术相结合的一种工程应用方法。在预应力结构中,通过施加预先设定的预应力,使结构在使用荷载下产生一定的预应力,从而改善结构的力学性能和抗震能力。而在孔道压浆技术中,通过在土体或岩体中打孔并向孔道内注入水泥浆料或其他压实材料,以增加土体或岩体的强度、稳定性和承载能力。预应力技术及预应力体系的应用极大地提高了建筑结构的服役表现,在建设工程中有着广泛的应用。预应力孔道压浆可以对预应力钢绞线起到保护作用,同时能够改善结构的应力分布。因此,预应力孔道压浆密实度检测是预应力结构施工和养护中的重要内容。
2、但孔道压浆隐蔽于结构内部,检测难度较大,若预应力孔道压浆不密实,将严重影响结构物的整体强度和耐久性。目前主要采用无损检测的方法对孔道压浆密实度质量进行检测,通过是通过锤击等方法在预应力结构表面某处激振,利用传感器采集冲击波振幅、波速、振动频率等数据并进行分析,判断预应力孔道压浆密实度,但是此方法只能定性检测,不能对孔道压浆密实度情况进行定量分析,检测结果并不直观。专利cn106501285b公开了一种无损检测预应力管道的压浆密实度的方法,通过电磁波的激发和采集,获得压浆密实孔道的特征电磁波信号,将该信号作为标准信号,然后将疑似不密实区域的特征电磁波信号与标准信号进行比对,若二者存在明显差异则判断该区域存在压浆缺陷。专利cn107894459b公开了一种基于波动信号特征分析的预应力孔道压浆密实度测试方法,通过沿被测孔道外设置一系列测点,在各测点逐次激发和采集应力波信号,对采集到的信号进行特征值分析,通过各测点的信号之间的差异判断压浆密实度缺陷所在位置。专利cn109115878a公开了一种桥梁预应力孔道压浆密实度超声检测装置及其检测方法,该专利方法采用超声发射换能器和超声接收换能器,沿孔道方向逐点采集超声信号,将采集到的信号进行数据转换、处理、存储及显示,根据反射波频谱图进行对比分析,反射波幅值若分布在高频区域则表面压浆不密实,反射波幅值若分布在低频区域则表面该检测区域压浆密实。
3、上述公开的方法是通过基于电磁波、应力波和超声波信号检测的方法,对采集信号进行特征值分析,利用信号的波幅、波形、频率等特征值,通过比对判断出孔道压浆密实度质量情况。但是这些方法均属于定性分析,不能对孔道压浆密实度情况进行定量分析,同时检测结果只能是处理后的检测信号的直接呈现,检测结果并不直观。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种预应力结构孔道压浆密实度插值成像检测方法,其解决了现有技术中存在的无法定量分析,检测结果不够直观的问题。
2、根据本发明实施例,提供了一种预应力结构孔道压浆密实度插值成像检测方法,其包括如下步骤:
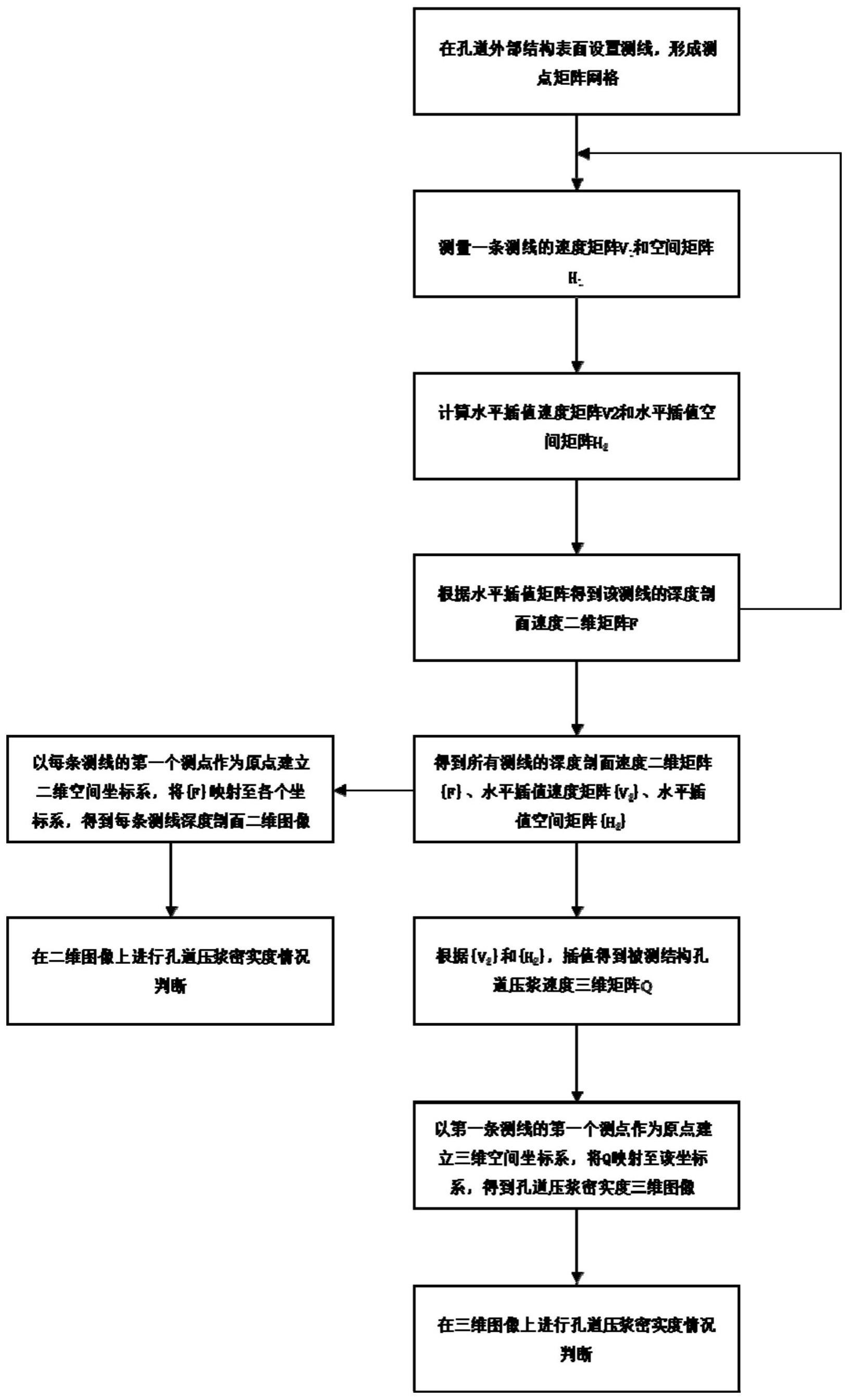
3、s1、在预应力孔道外部结构平面上,将孔道走向设置成水平方向,沿水平方向设置m条平行测线,每条测线上设置n个测点,所有测点形成二维矩阵网格,其中,m∈1,2,……,m、n∈1,2,……,n;
4、其中,测线长度为s,测线之间的间距为y,测线宽度为r,测点之间的间距为x;
5、s2、取第一条测线并对测线上的测点进行检测,得到该测线的深度原始速度矩阵v1和原始空间矩阵h1;
6、s3、将原始矩阵h1和v1的每行数据进行水平插值,插值点的空间距离为x,插值间距为dx,得到水平插值速度矩阵v2和水平插值空间矩阵h2;
7、其中,v2和h2每行的元素数目为n,n=s/dx+1;
8、s4、建立空白二维矩阵f0,将水平插值速度矩阵v2和水平插值空间矩阵h2映射至空白矩阵f0,得到该条测线的深度剖面速度二维矩阵f1;
9、其中,f0的列数为n,行数为l,l=z/dx+1,z为大于孔道最大深度的空间距离;
10、s5、更换测线,重复步骤s2-s4,直到得到全部测线的深度剖面速度二维矩阵fi;
11、其中,i=1,2,……,m;
12、s6、将各测线的水平插值速度矩阵v2和水平插值空间矩阵h2重排后进行垂直插值,得到被测结构的速度三维矩阵q;
13、其中,q=n×l×m,m为垂直插值数量,m=r/dx+1;
14、s7、取任一条测线上的第一个测点作为坐标原点建立二维空间坐标系,将深度剖面速度二维矩阵fi映射至该坐标系,得到孔道压浆密实度深度剖面二维图像;
15、s8、取第一条测线上的第一个测点作为坐标原点建立三维空间坐标系,将速度三维矩阵q映射至该坐标系,得到孔道压浆密实度三维图像;
16、s9、根据孔道压浆密实度深度剖面二维图像和孔道压浆密实度三维图像的结果对孔道压浆密实度进行判断。
17、进一步地,在所述步骤s2中,进行检测的数据包括测点至孔道轴心连线深度方向上混凝土层的弹性波平均速度v1、混凝土层厚度h1、孔道压浆料层的弹性波平均速度v2和孔道压浆料层厚度h2。
18、进一步地,在所述步骤s2中,原始速度矩阵v1第一行的值为各测点的混凝土层弹性波平均波速v11-v1n,第二行的值为各测点的压浆料层弹性波平均波速v21-v2n,原始空间矩阵h1第一行的值为各测点的混凝土层厚度h11-h1n,第二行的值为各测点的压浆料层厚度h21-h2n,其中n为测点的数量。
19、进一步地,在所述步骤s4中,所述映射还包括如下步骤:
20、s4.1、将v2中的元素记为v2ij,其中,i和j分别为矩阵v2的行和列,i=1,2;j=1,2,……,n;
21、将h2中的元素记为h2ij,其中,i和j分别为矩阵h2的行和列,i=1,2;j=1,2,……,n;
22、将f0中的元素记为fij,其中,i和j分别为矩阵f0的行和列,i=1,2,……,l;j=1,2,……,n;
23、s4.2、对于f0中第j列元素fij,当i×dx<h21j,或,i×dx>h22j时,则fij=v21j;
24、当h21j<i×dx<h22j时,则fij=v22j;
25、s4.3、对f0中所有列的元素重复步骤s4.2,得到深度剖面速度二维矩阵f1。
26、进一步地,在所述步骤s6中,所述垂直插值包括如下步骤:
27、s6.1、选择所有测线的水平插值速度矩阵v2的第一列元素,排列形成第一列的垂直速度矩阵v3;
28、选择所有测线的水平插值空间矩阵h2的第一列元素,排列形成第一列的垂直空间矩阵h3;
29、s6.2、将垂直矩阵v3和h3的每行数据进行垂直插值,得到垂直插值速度矩阵v4和垂直插值空间矩阵h4;
30、其中,插值点的空间距离为y,插值间距为dx,垂直插值矩阵每行的元素数目为m,m=r/dx+1;
31、s6.3、建立空白二维矩阵p0,p0的列数为m,p0的行数为l;
32、其中,l=z/dx+1,z为大于孔道最大深度的空间距离;
33、s6.4、将v4中的元素记为v4ij,其中,i和j分别为矩阵v4的行和列,i=1,2、j=1,2,……,m;
34、将h4中的元素记为h4ij,其中,i和j分别为矩阵h4的行和列,i=1,2、j=1,2,……,m;
35、将p0中的元素记为pij,其中,i和j分别为矩阵p0的行和列,i=1,2,……,l、j=1,2,……,m;
36、s6.5、取p0中第j列元素pij,当角标满足i×dx<h41j时,或,i×dx>h42j时,pij=v41j;当角标满足h41j<i×dx<h42j时,pij=v42j;
37、s6.6、对p0中所有列的元素重复步骤s6.4,得到孔道压浆第一列垂直二维矩阵p1;
38、s6.7、选择v2和h2的下一列元素,重复步骤s6.1至步骤s6.7,得到一系列孔道压浆速度垂直二维矩阵{pi},将{pi}按顺序排列,得到被测结构的速度三维矩阵q。
39、进一步地,在所述步骤s7中,所述二维空间坐标系是以矩阵元素的值作为像素值进行绘图,孔道压浆料层的速度表征密实度,其空间精度为dx。
40、进一步地,在所述步骤s8中,所述三维空间坐标系是以矩阵元素的值作为像素值进行绘图,孔道压浆料层的速度表征密实度,其空间精度为dx。
41、进一步地,在所述步骤s9中还包括以下步骤:
42、在孔道压浆密实度深度剖面二维图像和孔道压浆密实度三维图像上进行压浆密实度判断,孔道内的压浆料层的最大速度为v;
43、其中,当孔道内的速度大于0.9v时,该区域压浆密实;
44、当孔道内的速度大于0.7v小于0.9v时,该区域压浆部分密实;
45、当孔道内的速度小于0.7v时,该区域压浆不密实。
46、相比于现有技术,本发明具有如下有益效果:本发明通过设置多条测线,并对测线上的测点进行数据检测,并建立原始矩阵,通过对原始矩阵进行插值,得到深度剖面速度二维矩阵和速度三维矩阵,并分别将得到的矩阵映射至建立的二维空间坐标系和三维空间坐标系上,获得孔道压浆密实度深度剖面二维图像和孔道压浆密实度三维图像。本发明以插值精度作为空间检测精度,检测精度高,用检测位置的波速代表该位置的压浆密实度,物理意义明确,检测结果为检测数值、二维图像和三维图像,提供了明确的密实度判据,使得检测结果更加准确和直观,其解决了现有的检测方法只能通过采集信号并分析得到定性结果的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!