一种应用于多轮廓传感器的处理方法与流程
本发明涉及轮廓的计量,特别是涉及一种应用于多轮廓传感器的处理方法。
背景技术:
1、为了适应不同的测量应用场景,扩大测量的范围,一台轮廓传感器常常需要联合其他的轮廓传感器一起使用,每个轮廓传感器只需要扫描待采集目标的一部分轮廓即可,然后根据每个轮廓传感器扫描到的轮廓拼接出待采集目标的完整轮廓。但不同轮廓传感器对应的自身坐标系不同,若要准确拼接出待采集目标的完整轮廓,需要获取不同轮廓传感器之间的相对位置关系。如何获取不同轮廓传感器之间的相对位置关系,是亟待解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种应用于多轮廓传感器的处理方法,用于获取不同轮廓传感器之间的相对位置关系。
2、根据本发明,一种应用于多轮廓传感器的处理方法,包括以下步骤:
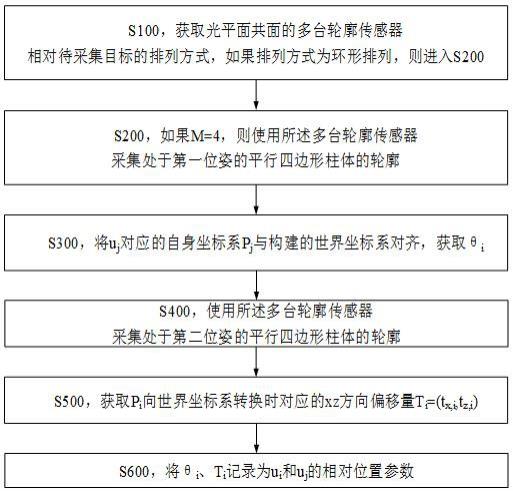
3、s100,获取光平面共面的多台轮廓传感器u=(u1,u2,…,ui,…,um)相对待采集目标的排列方式,如果排列方式为环形排列,则进入s200;ui为所述多台轮廓传感器中的第i台轮廓传感器,i的取值范围为1到m,m为所述多台轮廓传感器包括的轮廓传感器的数量,所述多台轮廓传感器用于采集所述待采集目标的轮廓。
4、s200,如果m=4,则使用所述多台轮廓传感器采集处于第一位姿的平行四边形柱体的轮廓;ui用于采集第一平行四边形p l1的第i个顶点s1i和s1i对应的第一边和第二边,所述s1i对应的第一边和第二边的交点为s1i,所述第一平行四边形p l1为所述处于第一位姿的平行四边形柱体被所述多台轮廓传感器的光平面切割后得到的平行四边形。
5、s300,将uj对应的自身坐标系pj与构建的世界坐标系对齐,根据、lm(i,w)=l l(i+1,w)和lm(m,w)=l l(1,w)获取θi,θi为ui对应的自身坐标系pi向所述世界坐标系转换时对应的y轴旋转角,i≠j,uj为所述多台轮廓传感器中的第j台轮廓传感器;lm(i,w)为世界坐标系下s1i对应的第二边的向量,lm(i,o)为pi下o1i对应的第二边的向量,o1i对应的第二边由ui采集s1i对应的第二边得到,o1i为pi下s1i对应的顶点;l l(i+1,w)为世界坐标系下s1i+1对应的第一边的向量,s1i+1为第一平行四边形p l1的第i+1个顶点,lm(m,w)为世界坐标系下s1m对应的第二边的向量,s1m为所述第一平行四边形p l1的第m个顶点,l l(1,w)为世界坐标系下s11对应的第一边的向量,s11为所述第一平行四边形p l1的第1个顶点;所述世界坐标系的y轴为处于第一位姿的平行四边形柱体的主轴方向,所述世界坐标系的x轴为p l1的其中一边的方向,所述世界坐标系的z轴为正交于所述世界坐标系的x轴与y轴的方向。
6、s400,使用所述多台轮廓传感器采集处于第二位姿的平行四边形柱体的轮廓;ui用于采集第二平行四边形p l2的第i个顶点s2i和s2i对应的第一边和第二边,所述s2i对应的第一边和第二边的交点为s2i,所述第二平行四边形p l2为所述处于第二位姿的平行四边形柱体被所述多台轮廓传感器的光平面切割后得到的平行四边形,所述第二位姿不等于所述第一位姿。
7、s500,根据
8、和获取pi向世界坐标系转换时对应的xz方向偏移量ti=(tx,i,tz,i),tx,i为pi向世界坐标系转换时对应的x方向偏移量,tz,i为pi向世界坐标系转换时对应的z方向偏移量;a=1,2,当a=1时,oax,i和oaz,i分别为o1i的x坐标和z坐标,ka1为o11和o12连线的斜率,ka2为o12和o13连线的斜率;当a=2时,oax,i和oaz,i分别为o2i的x坐标和z坐标,o2i为pi下s2i对应的顶点,ka1为o21和o22连线的斜率,ka2为o22和o23连线在pi下的斜率。
9、s600,将θi、ti记录为ui和uj的相对位置参数。
10、本发明至少具有以下有益效果:鉴于平行四边形柱体被4台环形排列的轮廓传感器的光平面切割后得到的是平行四边形,而平行四边形具有不同于其他多边形的特性(即平行四边形的相邻两个内角的和为180°,平行四边形的两个对角相等,而其他多边形的任意两个内角之间关系不确定),本发明针对4台轮廓传感器环形排列的联合测量应用场景,提出了一种获取4台轮廓传感器中不同轮廓传感器之间相对位置参数的方法;由于本发明的标定方法不要求标定过程中平行四边形柱体的主轴方向与4台轮廓传感器的光平面的法向量严格一致,可省去标定过程中将平行四边形柱体的主轴方向与4台轮廓传感器的光平面的法向量进行对齐的过程,提高标定过程的效率。本发明的处理方法适用于平行四边形柱体的主轴方向与4台轮廓传感器的光平面的法向量严格一致和不一致的场景,灵活性更高,适用范围更广。
技术特征:
1.一种应用于多轮廓传感器的处理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的应用于多轮廓传感器的处理方法,其特征在于,s100还包括:如果排列方式为并行排列,则进入s201;
3.根据权利要求2所述的应用于多轮廓传感器的处理方法,其特征在于,所述标定杆的ci和ci+1之间还设置有凹槽fi,当ui和ui+1的光平面与fi相交时,da,i=((doi)2-((r2-(li/2)2)1/2+(r2-(li+1/2)2)1/2)2)1/2;当ui和ui+1的光平面与fi不相交时,da,i=((doi)2-((r2-(li/2)2)1/2-(r2-(li+1/2)2)1/2)2)1/2;doi为ci的圆心与ci+1的圆心之间的距离,r为所述标定杆上设置的圆孔的半径,li为li的长度,li+1为li+1的长度。
4.根据权利要求2所述的应用于多轮廓传感器的处理方法,其特征在于,所述排列方式为并行排列的判断方法包括:如果所述待采集目标设置在所述多台轮廓传感器中每台轮廓传感器的相同侧,则判断排列方式为并行排列。
5.根据权利要求1所述的应用于多轮廓传感器的处理方法,其特征在于,所述排列方式为环形排列的判断方法包括:如果m≥3,且所述待采集目标设置在所述多台轮廓传感器围成的多边形的内部,则判断排列方式为环形排列。
6.根据权利要求1所述的应用于多轮廓传感器的处理方法,其特征在于,所述平行四边形柱体为长方体。
7.根据权利要求3所述的应用于多轮廓传感器的处理方法,其特征在于,所述凹槽fi的深度小于ci的深度。
技术总结
本发明涉及轮廓的计量技术领域,特别是涉及一种应用于多轮廓传感器的处理方法。所述方法包括:S100,如果光平面共面的多台轮廓传感器相对待采集目标的排列方式为环形排列,则进入S200;S200,如果M=4,则使用所述多台轮廓传感器采集处于第一位姿的平行四边形柱体的轮廓;S300,获取θ<subgt;i</subgt;;S400,使用所述多台轮廓传感器采集处于第二位姿的平行四边形柱体的轮廓;S500,获取P<subgt;i</subgt;向世界坐标系转换时对应的xz方向偏移量T<subgt;i</subgt;=(t<subgt;x,i</subgt;,t<subgt;z,i</subgt;);S600,将θ<subgt;i</subgt;、T<subgt;i</subgt;记录为u<subgt;i</subgt;和u<subgt;j</subgt;的相对位置参数。本发明能够获取不同轮廓传感器之间的相对位置关系。
技术研发人员:焦阳,张兰,陈聪,冀明明
受保护的技术使用者:天津宜科自动化股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!