一种用于生成雷达波形的方法与系统与流程
本发明属于雷达探测,尤其涉及一种用于生成雷达波形的方法与系统。
背景技术:
1、在雷达设计领域,如何完成方位向和俯仰向的波位排布以及每个具体雷达波位的雷达波形参数设计是非常重要的问题。雷达波形设计通常分为以下几个步骤,方位波位排布设计,俯仰波位排布设计,各波位雷达参数设计。
2、现有技术中,方位波位排布和俯仰波位排布一般根据雷达方位波束宽度和俯仰波束宽度进行设计,设计各波位雷达参数时,大多依据雷达威力公式和设计经验进行调整。很显然,这种依据经验手动进行功能雷达参数设计的方式非常耗时,当面临二维相控阵雷达动辄数千波位的雷达参数设计时,几乎是难以完成的工作,并且,也无法达到理论上的功率最优。
技术实现思路
1、为解决上述技术问题,本发明提出一种用于生成雷达波形的方案。
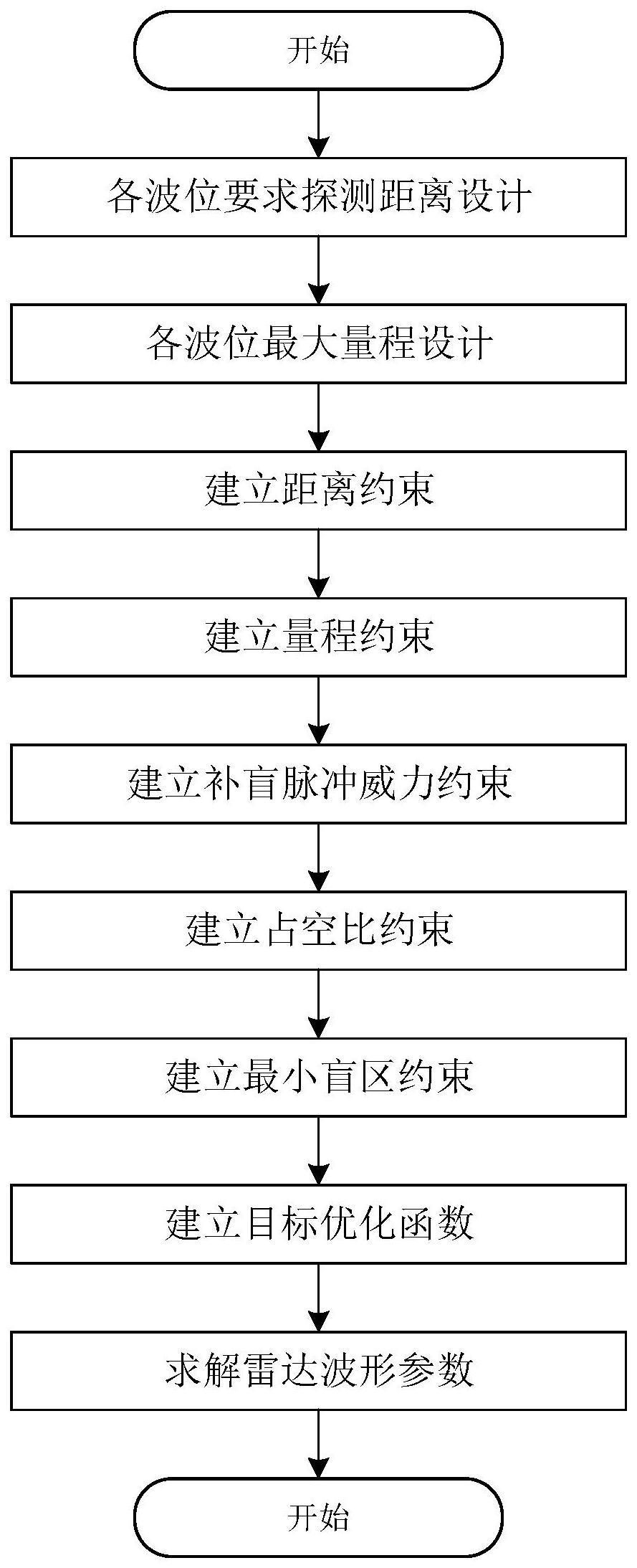
2、本发明第一方面公开了一种用于生成雷达波形的方法。生成的雷达波形用于进行目标探测;所述方法包括:配置雷达各个波位的要求探测距离,基于所述要求探测距离确定所述各个波位的最大量程以及建立距离约束,所述最大量程用于建立量程约束;建立补盲脉冲威力约束、占空比约束和最小盲区约束,结合所述距离约束和所述量程约束建立优化函数,以确定满足各个约束条件的雷达波形参数,所述雷达波形参数用于所述目标探测。
3、根据本发明第一方面的方法,所述配置雷达各个波位的要求探测距离具体包括:所述各个波位包括高空波位和低空波位,所述高空波位和所述低空波位的分界点为θ1=atan(hmax/rmax),hmax为雷达要求探测高度,rmax为雷达要求探测距离;对于所述各个波位的俯仰角θi,θi>θ1时为所述高空波位,所述高空波位的要求探测距离为rreqi=hmax/sin(θi);θi<θ1时为所述低空波位,所述低空波位的要求探测距离为rreqi=rmax;i={1,2},i=1表示所述高空波位,i=2表示所述低空波位。
4、根据本发明第一方面的方法,所述各个波位的最大量程为:rmdi=0.9rreqi。
5、根据本发明第一方面的方法,建立所述距离约束具体包括:建立雷达威力方程:
6、
7、r=(tpnccons)1/4
8、其中,r为雷达探测距离,pt为雷达发射功率,gt为雷达发射增益,gr为雷达接收增益,λ为雷达探测波长,rcs为目标的反射截面积,k为玻尔兹曼常数,t0为等效噪声温度,b为雷达信号带宽,f为雷达噪声系数,snr为雷达的探测要求信噪比,l为雷达系统损耗,n为雷达脉冲个数,tp为雷达脉冲宽度;
9、对于雷达波位i,其雷达探测威力大于其要求探测距离,则:
10、
11、中,为所述雷达波位i的宽脉冲宽度,cconsi为所述雷达波位i的威力常数,ni为所述雷达波位i的雷达脉冲个数。
12、根据本发明第一方面的方法,所述量程约束为:
13、(prti-tpni-tpwi)*150-rmdi≤0
14、其中,为所述雷达波位i的宽脉冲宽度,为所述雷达波位i的窄脉冲宽度,prti为所述雷达波位i的脉冲重复间隔。
15、根据本发明第一方面的方法,所述补盲脉冲威力约束为:
16、150*(tpwi+tpni)-(tpninicconsi)1/4≤0
17、所述占空比约束为:
18、(tpni+tpwi)-0.15*prti≤0
19、所述最小盲区约束为:
20、(tpni+tpwi)-0.15*prti≤0。
21、根据本发明第一方面的方法,所述优化函数为:
22、s.t.min ti=niprti
23、根据非线性优化方程组:
24、
25、得到满足所述各个约束条件的雷达波形参数tpni,ni,prti。
26、本发明第二方面公开了一种用于生成雷达波形的系统。生成的雷达波形用于进行目标探测;所述系统中的处理单元被配置为:配置雷达各个波位的要求探测距离,基于所述要求探测距离确定所述各个波位的最大量程以及建立距离约束,所述最大量程用于建立量程约束;建立补盲脉冲威力约束、占空比约束和最小盲区约束,结合所述距离约束和所述量程约束建立优化函数,以确定满足各个约束条件的雷达波形参数,所述雷达波形参数用于所述目标探测。
27、根据本发明第二方面的系统,所述配置雷达各个波位的要求探测距离具体包括:所述各个波位包括高空波位和低空波位,所述高空波位和所述低空波位的分界点为θ1=atan(hmax/rmax),hmax为雷达要求探测高度,rmax为雷达要求探测距离;对于所述各个波位的俯仰角θi,θi>θ1时为所述高空波位,所述高空波位的要求探测距离为rreqi=hmax/sin(θi);θi<θ1时为所述低空波位,所述低空波位的要求探测距离为rreqi=rmax;i={1,2},i=1表示所述高空波位,i=2表示所述低空波位。
28、根据本发明第二方面的系统,所述各个波位的最大量程为:rmdi=0.9rreqi。
29、根据本发明第二方面的系统,建立所述距离约束具体包括:建立雷达威力方程:
30、
31、r=(tpnccons)1/4
32、其中,r为雷达探测距离,pt为雷达发射功率,gt为雷达发射增益,gr为雷达接收增益,λ为雷达探测波长,rcs为目标的反射截面积,k为玻尔兹曼常数,t0为等效噪声温度,b为雷达信号带宽,f为雷达噪声系数,snr为雷达的探测要求信噪比,l为雷达系统损耗,n为雷达脉冲个数,tp为雷达脉冲宽度;
33、对于雷达波位i,其雷达探测威力大于其要求探测距离,则:
34、
35、中,为所述雷达波位i的宽脉冲宽度,cconsi为所述雷达波位i的威力常数,ni为所述雷达波位i的雷达脉冲个数。
36、根据本发明第二方面的系统,所述量程约束为:
37、(prti-tpni-tpwi)*150-rmdi≤0
38、其中,为所述雷达波位i的宽脉冲宽度,tpni为所述雷达波位i的窄脉冲宽度,prti为所述雷达波位i的脉冲重复间隔。
39、根据本发明第二方面的系统,所述补盲脉冲威力约束为:
40、150*(tpwi+tpni)-(tpninicconsi)1/4≤0
41、所述占空比约束为:
42、(tpni+tpwi)-0.15*prti≤0
43、所述最小盲区约束为:
44、(tpni+tpwi)-0.15*prti≤0。
45、根据本发明第二方面的系统,所述优化函数为:
46、s.t.min ti=niprti
47、根据非线性优化方程组:
48、
49、得到满足所述各个约束条件的雷达波形参数tpni,ni,prti。
50、本发明第三方面公开了一种电子设备。所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时,实现本公开第一方面所述的一种用于生成雷达波形的方法中的步骤。
51、本发明第四方面公开了一种计算机可读存储介质。所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现本公开第一方面所述的一种用于生成雷达波形的方法中的步骤。
52、综上,本发明提出的技术方案能够提高雷达波形设计的工作完成效率,以及提高雷达能量的使用效率。
- 还没有人留言评论。精彩留言会获得点赞!