车厢内对象体积处理方法、装置、计算机设备及存储介质与流程
本技术涉及体积测量,具体而言,涉及一种车厢内对象体积处理方法、装置、计算机设备及存储介质。
背景技术:
1、近年来,随着快递运输行业的日益发展,保证让每一辆车车厢装满货后运输,可以减少车厢空运的情况发生,降低快递运输成本。因此,准确计算车厢对象体积显得尤为重要,可以很好地提升车厢装载率,最大化利用运输资源,降低快递运输成本。
2、相关技术中,车厢内对象的体积一般是由人工肉眼去观察统计,当车厢内装好对象后,运输人员通过在车厢外或车厢内的某处观察眼前的对象,粗略计算得到当前对象的体积,而对于视角盲区的对象体积默认为全部填充,将人工估算的对象体积上报给快递运输公司,以得到该车厢的对象体积。
3、然而,通过人工肉眼观察车厢内的对象体积,存在对象体积计量不准确、车厢装载率低、耗费时间长的问题。
技术实现思路
1、本技术的目的在于提供一种车厢内对象体积处理方法、装置、计算机设备及存储介质,可以达到精准快速计算对象体积、提高车厢装载率的效果。
2、本技术的实施例是这样实现的:
3、本技术实施例的第一方面,提供一种车厢内对象体积处理方法,包括:
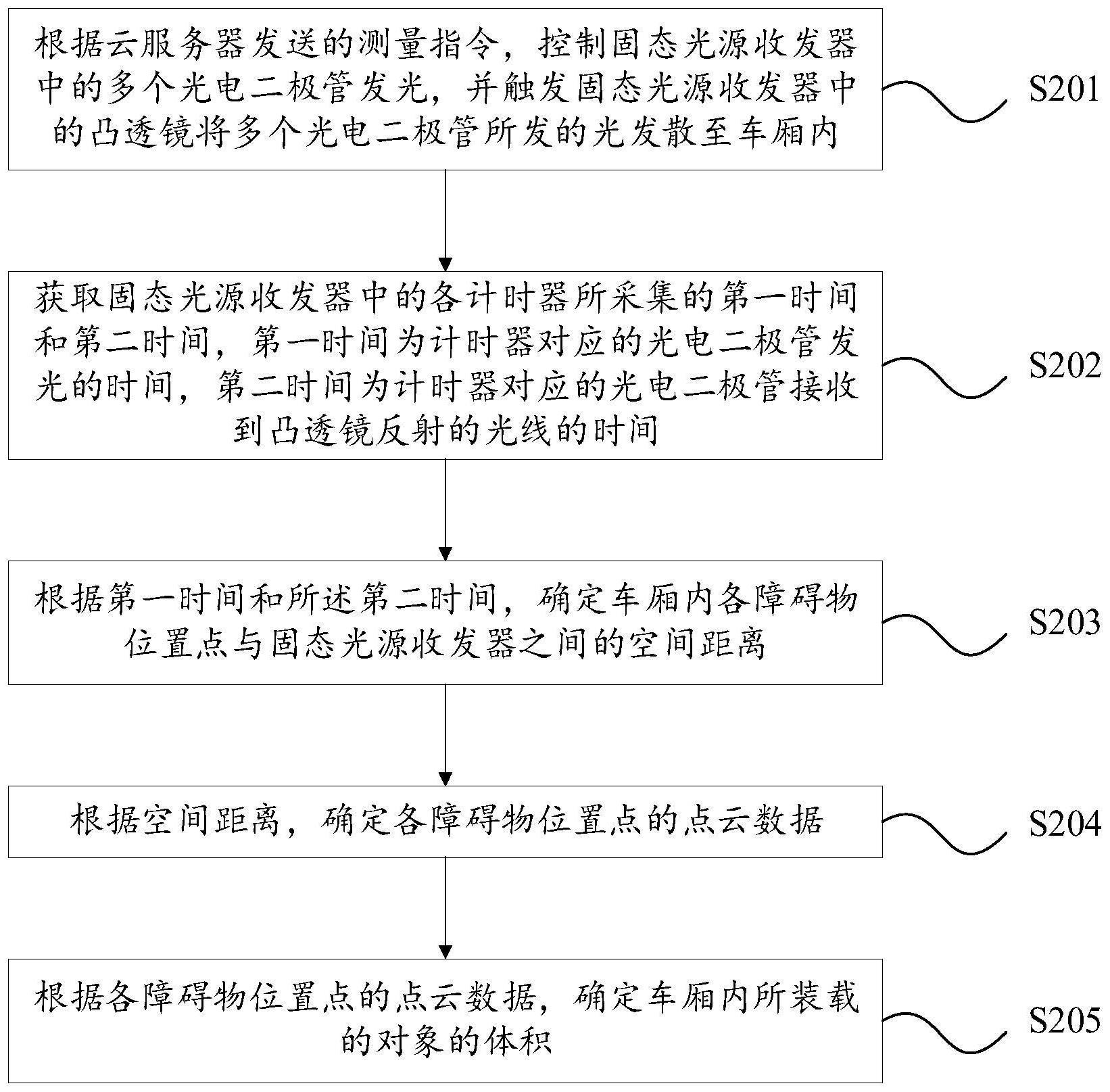
4、根据云服务器发送的测量指令,控制所述固态光源收发器中的多个光电二极管发光,并触发所述固态光源收发器中的凸透镜将所述多个光电二极管所发的光发散至车厢内;
5、获取所述固态光源收发器中的各计时器所采集的第一时间和第二时间,所述第一时间为所述计时器对应的光电二极管发光的时间,所述第二时间为所述计时器对应的光电二极管接收到所述凸透镜反射的光线的时间;
6、根据所述第一时间和所述第二时间,确定所述车厢内各障碍物位置点与所述固态光源收发器之间的空间距离;
7、根据所述空间距离,确定各所述障碍物位置点的点云数据;
8、根据各所述障碍物位置点的点云数据,确定所述车厢内所装载的对象的体积。
9、作为一种可能的实现方式,所述根据所述第一时间和所述第二时间,确定所述车厢内各障碍物位置点与所述固态光源收发器之间的空间距离,包括:
10、计算所述第二时间减去所述第一时间的差值;
11、计算所述差值与光速的乘积,得到往返距离;
12、根据所述往返距离,得到所述障碍物位置点与所述固态光源收发器之间的空间距离。
13、作为一种可能的实现方式,所述根据所述空间距离,确定各所述障碍物位置点的点云数据,包括:
14、以所述固态光源收发器安装的位置作为原点建立三维坐标系,根据所述障碍物位置点与所述固态光源收发器之间的空间距离,得到所述障碍物位置点的点云数据。
15、作为一种可能的实现方式,所述以所述固态光源收发器安装的位置作为原点建立三维坐标系,根据所述障碍物位置点与所述固态光源收发器之间的空间距离,得到所述障碍物位置点的点云数据,包括:
16、以所述固态光源收发器安装的位置作为原点建立三维坐标系,根据所述障碍物位置点与所述固态光源收发器之间的空间距离,确定所述障碍物位置点相对于所述原点的位置坐标;
17、根据所述障碍物位置点相对于所述原点的位置坐标,得到所述障碍物位置点的点云数据。
18、作为一种可能的实现方式,所述根据各所述障碍物位置点的点云数据,确定所述车厢内所装载的对象的体积,包括:
19、根据所述车厢的尺寸数据,确定所述车厢的各顶点在以所述固态光源收发器安装的位置为原点的三维坐标系中的坐标;
20、根据所述车厢的各顶点在所述三维坐标系中的坐标,建立所述车厢的车厢模型,并将所述车厢模型划分为多个立方体体素;
21、根据各所述障碍物位置点的点云数据,确定各立方体体素中所包括的点云数据;
22、根据各立方体体素中所包括的点云数据,确定各立方体体素中的对象的体积;
23、根据各立方体体素中的对象的体积,得到所述车厢内所装载的对象的体积。
24、作为一种可能的实现方式,所述根据各所述障碍物位置点的点云数据,确定各立方体体素中所包括的点云数据,包括:
25、根据所述立方体体素的各顶点的坐标,确定所述立方体体素的坐标区间;
26、若第一障碍物位置点的点云数据位于所述立方体体素的坐标区间内,则确定所述第一障碍物位置的点云数据属于所述立方体体素,其中,所述第一障碍物位置点为所述车厢内的任一障碍物位置点。
27、作为一种可能的实现方式,所述根据各立方体体素中所包括的点云数据,确定各立方体体素中的对象的体积,包括:
28、从所述立方体体素中筛选出满足预设条件的多个目标点云数据;
29、根据所述目标点云数据的数量以及所述立方体体素的体积,确定所述立方体体素中的对象的体积。
30、本技术实施例的第二方面,提供了一种车厢内对象体积处理装置,所述车厢内对象体积处理装置包括:
31、控制模块,用于控制所述固态光源收发器中的多个光电二极管发光,并触发所述固态光源收发器中的凸透镜将所述多个光电二极管所发的光发散至车厢内;
32、获取模块,用于获取所述固态光源收发器中的各计时器所采集的第一时间和第二时间,所述第一时间为所述计时器对应的光电二极管发光的时间,所述第二时间为所述计时器对应的光电二极管接收到所述凸透镜反射的光线的时间;
33、确定模块,用于根据所述第一时间和所述第二时间,确定所述车厢内各障碍物位置点与所述固态光源收发器之间的空间距离;
34、确定模块,用于根据所述空间距离,确定各所述障碍物位置点的点云数据;
35、确定模块,具体用于根据各所述障碍物位置点的点云数据,确定所述车厢内所装载的对象的体积。
36、本技术实施例的第三方面,提供了一种计算机设备,所述计算机设备包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的车厢内对象体积处理方法。
37、本技术实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的车厢内对象体积处理方法。
38、本技术实施例的有益效果包括:
39、本技术实施例提供的一种车厢内对象体积处理方法,应用于固态光源收发器,通过接收云服务器发送的测量指令,在电源的电信号触发下固态光源收发器中的多个光电二极管同时发光,同时计时器将其对应的光电二极管发光时间进行计时为第一时间,将其对应的光电二极管接收到凸透镜反射的光线的时间记为第二时间,根据第一时间和第二时间以及光速确定车厢内各个障碍物位置点与固态光源收发器之间的距离,根据障碍物位置点的空间距离就可以确定各个障碍物的点云数据,最终根据点云数据确定车厢内装载对象的体积。其中,点云数据就是各个障碍物位置点的三维坐标,是基于固态光源收发器为原点的三维坐标系的三维坐标,根据该三维坐标系中的各个立方体体素体积的计算,将各个障碍物位置点的点云数据带入立方体体素体积比值中,计算得到各个立方体体素内车厢内装载的对象的体积,将各个立方体体素内对象的体积相加,就可以得到车厢内装载的对象的体积。如此,可以达到精准快速计算对象体积、提高车厢装载率的效果。
- 还没有人留言评论。精彩留言会获得点赞!