用于检查地面运输工具上接纳的负载的轮廓的设备和方法与流程
本发明涉及一种用于检查地面运输工具上接纳的负载的轮廓的设备、一种用于检查地面运输工具上接纳的负载的系统以及一种用于在这种系统中检查地面运输工具上接纳的负载的轮廓的方法。
背景技术:
1、本发明涉及对设置在负载载体上的货物的轮廓进行检查的主题,货物在物流环境中借助于地面运输工具来运送,并且在此形成就本技术意义而言的负载。由于在这种物流装置中处理货物越来越自动化地进行,需要检查在其负载载体、即例如托盘等类似物上的货物的轮廓,以便确保:货物在借助于地面运输工具或货架操作设备被进一步操作时不突出于负载载体轮廓,或者换言之,待由地面运输工具接纳的负载在其几何尺寸方面处于预定的设定范围内。
2、如果不进行这种检查并且实际上存在货物突出超过负载载体轮廓或者出于其他原因负载没有遵守预设的轮廓,则这会导致物流装置中的货物或设施的损坏或者导致事故,例如在其入仓时与货架载体或其他货物发生碰撞,其中还会造成货物或部分货物坠落。
3、在此上下文中从现有技术中已知的是:借助于接管对应的负载载体以对其进行检查的设备来检查负载载体上的货物相对于负载载体的轮廓。这例如可以在入仓到货架中之前在移交给货架操作设备的范围中以固定的方式在为此所设的站点中进行,例如在ep 3464 124 b1中的设施中所执行的。
4、同样已知的是:在运输带上运输时借助于光栅执行对这种轮廓的检查,例如在us8,564,791中所描述的,将对应的负载载体在对其进行检查之前安置到运输带上,并且然后在该运输带上对其进行引导通过光栅。
5、然而,现有技术中的两种所提及的处理方式如所提到的那样分别要求将待检查的负载以所提到的方式移交给被设置用于检查的设备,即例如控制站点或运输带,这分别是时间耗费的,并且在操作对应的负载时需要附加的工作步骤。因此,在检查复杂轮廓时存在改进潜力,即应当以一定方式使负载轮廓的对应控制可行,该方式不需要附加的操作步骤,而是以有利的方式可以集成到现有的工作步骤中进而可以节约时间地且以投入少量人员的方式来执行。
技术实现思路
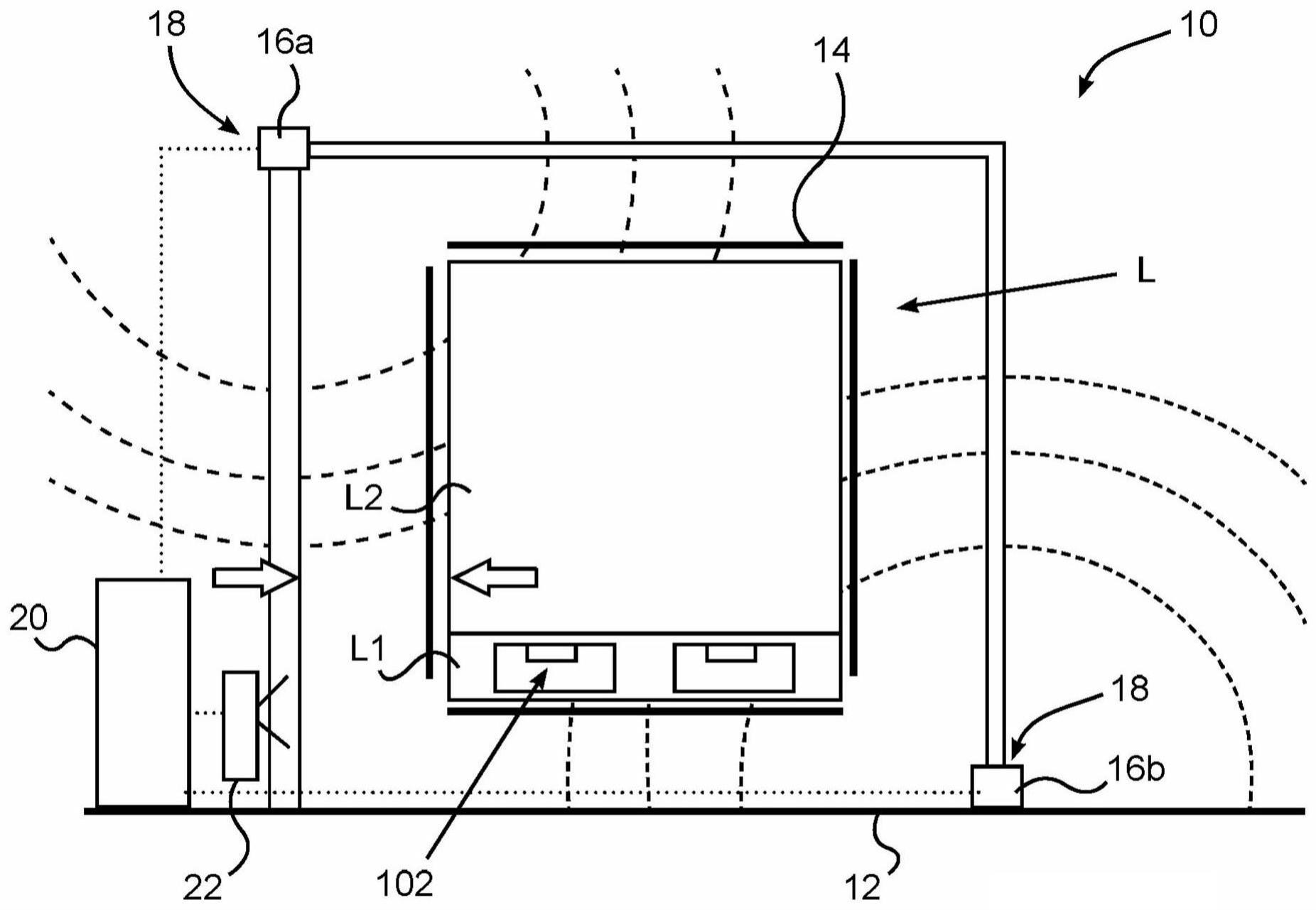
1、为此目的,本发明提出一种用于检查地面运输工具上接纳的负载的轮廓的设备,该设备包括可由地面运输工具驶过的底座和至少两个传感器单元,其中传感器单元设计用于记录二维数据,并且设置成,使得展开基本上竖直的检测区域;其中该设备还包括控制装置,控制装置设计用于预设和/或确定处于可被驶过的底座上的地面运输工具关于检测区域的相对位置;和至少一个评估单元,评估单元设计用于对由传感器单元记录的数据进行评估,在考虑该相对位置的情况下,在检测区域中由地面运输工具所占据的表面和/或由其承载的负载所占据的表面是否满足预定条件。
2、因此,通过根据本发明的设备创建如下可行性:直接在借助地面运输工具对负载进行运输期间检查负载的轮廓,即尤其检查在负载载体、如托盘上所接纳的物品的轮廓。在此,检查设备是固定式设备,地面运输工具可以在可驶过的底座上穿行经过该固定式设备或者可以至少移入到该固定式设备中,并且该固定式设备因此不设置在车辆本身处并且也不需要交付给单独的站。通过使用根据本发明的方式的、具有记录二维数据的能力的传感器单元还使得可以在检查过程的任意时间点逐层检查相应的剖平面,并且一旦确定违背了预定条件,就可以将待检查的轮廓分类为不期望或不适合的轮廓。
3、控制设备的这种设计方案的特别优点在于:即使不使用固定式检查站或运输带,也可以以非常节约时间的方式在借助地面运输工具进行运输期间检查轮廓。
4、此外,在此上下文中需注意的是:所提到的预定条件通常涉及当前考虑的平面中的负载的最大允许的尺寸,使得例如可以预设保护场区,所提到的负载不得伸入该保护场区中。对这种保护场区的评估例如可以在传感器单元本身中进行,或者可以采取更复杂的数据处理步骤来进行,以便在该方面评估由传感器单元提供的数据。在此,违反预定条件或干预保护场区会引发不同的进程,例如可以使对应的地面运输工具首先置于安全状态,并且必要时在预定区域中移动物流设施,和/或其可以要求对负载进行人工检查,在该检查之前对其进行进一步操作是不允许的。替代地也可以提出:将负载停放在对应的地点处用于进一步检查。
5、此外,关于此点要提及的是:尽管可以将至少两个传感器单元设置成,使得单独的基本上竖直的检测区域由全部传感器单元同时覆盖,使得这些检测区域位于单独的平面中,然而另一方面同样可以考虑的是:传感器单元可以在垂直于相应的检测区域的方向上,尤其在检查过程期间在可被驶过的底座上的地面运输工具的前向移动的方向上相互错开特定的量。于是,在这种情况下,会分别为每个传感器单元考虑处于可驶过的底座上的地面运输工具关于检测区域的相对位置,而在位于单独检查平面中的检测区域中必须仅一次性预设或确定所提到的相对位置。
6、同样地关于此点需要指出:预设或确定位于可驶过的底座上的地面运输工具的相对位置涉及的是:可以要么由控制装置来预设地面运输工具的穿行,其中地面运输工具于是可以高的位置精度执行在可驶过的底面上的精确的移动流程,要么地面运输工具以较低的精度在检查设备中驶过该可驶过的底座,并且其精确位置通过控制装置来确定,例如根据传感器数据或由车辆本身提供的位置数据来确定。
7、原则上,只要可以足够的精度记录并且相应地继续处理二维数据以确定轮廓,传感器单元的设计方案可以遵循不同的方案法则。因此,为此目的可以使用声学传感器以及例如3d相机,然而在本发明的优选的实施方式中,传感器单元尤其可以构成为激光扫描仪,其中具有足够精度用于根据本发明的设备的这种具有所提到的特性和能力的激光扫描仪在市场上可以相对便宜地来获得并且可以容易地被集成到这种设备中。
8、特别地,在根据本发明的设备恰好包括两个传感器单元的实施方式中,这些传感器单元彼此对准,使得检测区域通过以下方式构成为矩形:即,传感器单元位于其彼此相对置的两个角中。在这种设计方案中,两个传感器单元中的一个传感器单元检查负载的上侧和竖直侧的轮廓,而另一传感器单元会检查负载的相对置的竖直侧和下侧。因此,本发明在这种实施方式中的另一优点在于:与现有技术中的负载载体立于底座、例如运输带上的轮廓检查设备相反,当由地面运输工具的负载接纳机构(例如叉尖)在提升状态下将负载载体运输穿过检测区域时,可以检测负载载体下方的区域。在此,在传感器单元相对于其检测区域的平面相对错开的上述情况下,还可以将传感器单元构成为矩形理解为:各个检测区域垂直于传感器单元的扩展平面的投影。
9、此外,在所提到的在矩形的两个彼此相对置的角中、基于地面运输工具和尤其是其所承载的负载的通常尺寸的布置可以包括以下布置:将两个传感器单元中的一个设置在例如约2m的高度中,并且将另一传感器单元刚好设置在可驶过的底座之上。以该方式形成矩形作为检测区域,在该检测区域中应可以对所有通常由地面运输工具所承载的负载进行轮廓检查。
10、此外,在本发明中,至少一个评估单元或至少一个传感器单元可以设计用于:在竖直方向上将检测区域分区段,以将由地面运输工具接纳的负载关于其高度划分至至少两个值范围之一中。以该方式,可以在负载的高度方面对其加以区分,并且可以例如以如下方式划分成:其是否超过或低于预定的第一高度,或者其是否落入三个预定高度范围之一中。通过将负载这样分类成不同高度可以为其例如在物流装置中分配不同的仓储空间,由此可以通过根据本发明的设备实现进一步节省对各个负载进行处理的操作时间。
11、虽然如上所述,可以设置直接在传感器单元本身中对由传感器单元记录的关于预定条件的数据进行评估,特别是在简单地检查保护场区时进行评估,这对应于将评估装置集成到传感器单元中,然而,在另一实施方式中,控制装置和评估装置还可以通过共同的数据处理单元形成,该数据处理单元相应地获得由至少两个传感器单元记录的传感器数据,以便进一步对其进行处理。
12、此外,根据本发明的设备可以包括另一传感器单元,该另一传感器单元设计用于:检测驶过底座的地面运输工具的速度,并且该另一传感器单元在操作方面与控制装置和/或评估单元耦联,例如以便根据地面运输工具的前向移动方向以始终精确的方式获得关于其当前位置的信息,这会有助于改进地检查负载的前方和后方的竖直侧。
13、此外,本发明涉及一种用于检查地面运输工具上接纳的负载的系统,该系统包括:上述类型的检查设备和至少一个地面运输工具,该地面运输工具设计用于:在负载接纳机构上优选以可高度位移的方式承载负载。
14、虽然本发明显然可以借助任何类型的地面运输工具来实施,即例如也可以借助手动或半自动操作的地面运输工具来实施,然而,尤其可以考虑的是使用自主引导的地面运输工具(也称为agv——自动导引车辆,自主移动机器人或ftf——无人运输车辆)。这种自主引导的地面运输工具从导控中心接收用于其移动和操作负载的指令,并且然后以自主的方式在物流环境中执行该移动和操作任务。在此,通过在穿行检测区域时使用自动行驶操作可以实现比在手动穿行时更高的精度和位置准确性,由此又可以提高轮廓检查的精度。这种自动行驶操作尤其可以通过使用自动引导车辆或agv来实现或也可以通过使用辅助系统来实现,在其他类型的地面运输工具中,辅助系统至少在轮廓检查范围内自动地控制地面运输工具。
15、在此应当理解的是,根据本发明的系统可以适合于:包括这种地面运输工具的整个车队,该地面运输工具分别在不同的时间点以所提出的方式驶过检查设备的可驶过的底座,以便对由其承载的负载在其轮廓方面进行检查。在此提供:在驶向物流装置的仓储区域时对系统的检查设备进行设置,例如在加载对应的地面运输工具之后然而在其移入仓储区域中之前进行设置,以便在仓储区域内进一步操作负载时会是安全的:即,使得待操作的负载在其轮廓方面满足预定条件,并且不会由于不规则的或有错的负载而出现事故。
16、在此,在根据本发明的系统中,检查设备和地面运输工具包括相应的通信单元,以实现检查设备和地面运输工具之间的通信,例如以便使地面运输工具可以了解在可驶过的底座上的即将发生的驶入,或者以便使检查设备可以基于传感器数据指示地面运输工具校正其路线或位置。在此,可以直接或间接地提供借助两个通信单元进行的所提出的通信,即检查设备和地面运输工具可以彼此直接通信或者可以经由外部实体,例如自身的车辆的导控系统来展开通信。
17、这种导控系统同样还可以包括在根据本发明的系统中,并且设计用于:将工作指令传输给至少一个地面运输工具,其中导控系统可以与至少一个地面运输工具处于通信连接,并且必要时可能还与检查设备通信连接。
18、此外,至少一个地面运输工具可以设计用于:借助于位置传感器单元确定地面运输工具的绝对位置或相对位置,并且将其传输至检查设备。这样确定出的位置可在检查地面运输工具上接纳的负载轮廓的过程中使用,其中通常这种位置传感器单元要么光学地经由设置在物流装置中的标记来工作,要么例如还感应式地经由设置在可驶过的底座中的感应元件来工作。
19、最后,本发明涉及一种用于在刚刚描述的类型的系统中检查地面运输工具上接纳的负载的轮廓的方法,其包括由地面运输工具在可驶过的底座上穿行检查设备的检测区域。
20、正如上文多次提到的那样,为此需要精确地了解地面运输工具或所接纳的负载相对于检测区域的当前位置,以便可以期望的精度来检查轮廓,其中要么以精确预设的位置和定向穿行检测区域,要么在检查中考虑车辆的精确确定的位置。
21、在此,根据本发明的方法还可以包括将地面运输工具的负载接纳机构转移到升降装置的预定高度,即例如叉车的叉载体的升降器上,由此可以确保:在高度方向上高于可驶过的底座可以精确地遵守预设的参考零点。
22、在执行根据本发明的方法时,一方面显然期望地面运输工具的穿行速度尽可能高,这是因为由此可以节省时间,但另一方面在穿行速度过高的情况下,对于检查所需的测量精度会受到影响。因此已经表明的是:尤其可以在速度处于50mm/s到200mm/s范围内的情况下由地面运输工具穿行检测区域,更优选在约125mm/s的情况下由地面运输工具穿行检测区域。这种速度为在有效执行检查和其尽可能高的精度之间的最佳折衷。
23、此外,根据本发明的方法可以包括以下步骤中的至少一个:
24、-确定负载相对于负载接纳机构的位置;
25、–在由地面运输工具穿行检测区域之前和/或之后对检测区域检查异物的存在;和/或
26、-暂时停止由地面运输工具穿行检测区域,以检查负载的前部轮廓和/或后部轮廓。
27、由于根据本发明的方法总是通过在平面中定义检测区域来提供该平面的剖面图,所以在负载进入地面运输工具的检测区域的平面中之前和/或之后可以使该设备停止,以便检查负载在穿行方向上的前部或后部区域中的轮廓,使得关于这一点可以确保:负载在所提到的上述两个方向上也不会突出到预定的保护区域中。在此,在这些时间点可以执行对保护区域的适配,使得这仅涉及地面运输工具的可在检测区域中预期的部件,例如对应的负载接纳机构,尤其是出于此目的而使用的叉尖、叉背等。
28、为了提高这种确定的精度,还可以执行以已经提到的方式确定负载相对于负载接纳机构的位置,例如根据设置在地面运输工具本身处的传感器来确定,该传感器例如可以借助于光学测量或其他适合于此的测量方法来确定负载的承载位置。
29、通过在由地面运输工具穿行检测区域之前和/或之后对检测区域检查是否存在异物,一方面可以避免事故,并且另一方面可以确保对地面运输工具上的负载轮廓的检查不会提供由于干扰所引起的错误结果。
30、此外,由于可以在根据本发明的方法中或根据本发明的系统中检查不同类型的地面运输工具和/或具有各个不同几何形状的所属于负载的不同的负载载体,所以还可以提出根据地面运输工具的车辆类型和/或所属于负载的负载载体来适配预定条件,以便可以考虑这种不同的车辆或负载载体几何形状。
- 还没有人留言评论。精彩留言会获得点赞!