一种基于动态复原矩阵的波前复原加速方法
本发明属于波前传感,尤其涉及一种基于动态复原矩阵的波前复原加速方法。
背景技术:
1、夏克-哈特曼波前传感(sh-wfs)器是目前应用最广的波前传感器,通常由微透镜和ccd光电传感器组成,它是以高的时间和空间分辨率提供光束位相和光强的动态时间-空间分布,是一种以波前斜率测量为基础的波前测试仪器。夏克-哈特曼波前传感器具有以下优点:结构简单,没有运动部件;可以对重复率脉冲的信标进行探测。
2、实际应用中,受大气湍流、噪声、夏克-哈特曼波前传感器部分子孔径内光强闪烁甚至出现缺光等因素影响,传统波前复原算法的复原精度难以满足这些场景的需求,需要对光强、斜率等信息进行加权或子孔径去除满足复原精度需要求以及稳定的波前复原。2013年xue等人提出的基于强度分布的控制算法通过对光强加权将激光斯特列尔比提升了5%,2016年chen等人通过对斜率加权将一级衍射环的能量从41%提升64%,2020年wei等人实验表明对于缺光场景下子孔径去除法相比斜率置零法复原精度相对较高。这些算法有以下的特征,即需要重新求解复原矩阵的逆矩阵。svd方法常常被用于计算复原矩阵广义逆矩阵,由于svd方法运算量较大且随着矩阵维度增加运算量会急速增加严重影响系统的实时性,这也是限制缺光子孔径去除法广泛应用的因素,因此,亟需寻找一种加速波前复原系数求解的方法。
技术实现思路
1、本发明要解决的技术问题是:解决夏克-哈特曼波前传感器子孔径缺光或对斜率、光强加权场景下动态复原矩阵波前复原实时性差的问题,提出了一种基于动态复原矩阵的波前复原加速方法,在相同波前复原精度下可有效提高波前复原的实时性。
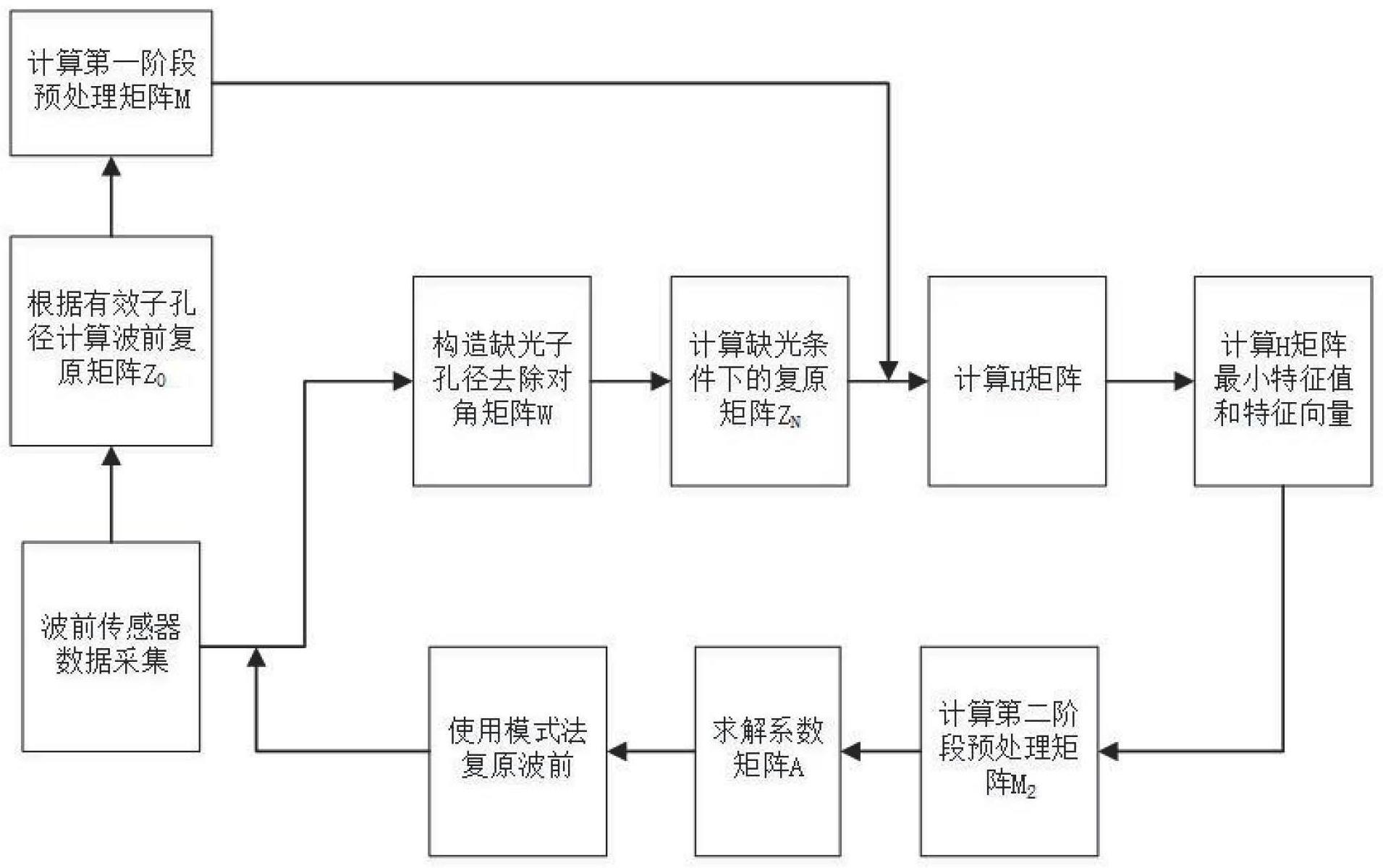
2、本发明解决上述技术问题采用的技术方案是:一种基于动态复原矩阵的波前复原加速方法,该方法通过对共轭梯度或其变种构造双阶段预处理器将求解的线性系统转化为一个与其有相同解但有良好的谱属性的线性系统从而加快迭代的收敛速度提高求解的实时性,以子孔径去除法为应用案例,该方法具体通过以下步骤实现:
3、步骤1:基于模式法的波前复原可用线性等式表示为g=zoa,其中g是波前传感器探测得到的斜率数据,z是静态的复原矩阵,a是要求解的泽尼克系数,为了减小计算复杂度和提高复原精度常用的线性等式为对静态的复原矩阵求广义逆作为共轭梯度或其变种第一阶段预处理矩阵即
4、步骤2:构造产生动态复原矩阵的对角矩阵w,zn=((wzo)t(wzo))为动态的复原矩阵,将矩阵h=znm1作为第二阶段预处理矩阵的优化基础,h是一个特征值为0到1之间的簇矩阵,当特征值分布越集中时,预处理共轭梯度平方法收敛速度越快,因此可以通过修改h矩阵的条件数集中特征值分布。
5、步骤3:通过改善h矩阵最小特征值的方式减小h矩阵的条件数,应用克雷洛夫子空间方法通过有限步骤估计最小特征值t和特征向量v。
6、步骤4:t=kt是缩放后的特征值,k是比例系数,第二阶段预处理矩阵可表示为m2=m1+m1*v*(vt/t),将m2作为最终的共轭梯度平方法的预处理矩阵。
7、步骤5:使用预处理后的共轭梯度或其变种求解波前泽尼克模式系数。
8、进一步地,步骤3所述的克雷洛夫估计最小特征值的过程如下:
9、步骤3.1:确定第一阶段预处理矩阵m1和非零随机向量x0,然后对非零随机向量x0做归一化操作:x=x0/||x0||2。
10、步骤3.2:对特征向量进行求解过程如下:
11、
12、其中,i是迭代次数,α是迭代步长。
13、步骤3.3:重复步骤3.2可求解最小特征值特征向量和最小特征值t=vthv。
14、本发明与现有技术相比有如下优点:
15、本发明通过双阶段预处理方法加速迭收敛速度可进一步提高缺光子孔径去除法求解模式系数速度,在兼顾波前传感器对子光斑丢失容忍度的基础上为信标光近场光强分布不均匀、光强闪烁等情况的高精度高帧频的波前复原提供有效的解决方案,拓宽了缺光子孔径去除法的适用范围。
技术特征:
1.一种基于动态复原矩阵的波前复原加速方法,其特征在于:通过对共轭梯度或其变种进行双阶段预处理优化操作加速迭代收敛速度从而加快波前复原速度,该方法具体通过以下步骤实现:
2.根据权利要求1所述的一种基于动态复原矩阵的波前复原加速方法,其特征在于:步骤3所述的克雷洛夫子空间方法估计最小特征值t的过程如下:
技术总结
本发明提出了一种基于动态复原矩阵的波前复原加速方法,该方法适用于共轭梯度及其变种求解波前复原系数并通过提出的双阶段预处理器加速波前复原,本发明在相同的复原精度下,波前复原的乘法运算量约是SVD方法波前复原的1/28,相比没有预处理器共轭梯度变种算法波前复原速度整体提升约35%。本发明可有效提高由斜率或光强等进行加权造成复原矩阵动态变化的波前复原和控制实时性,拓展了波前传感器的使用范围,有望用于光强闪烁等缺光场景的高精度、高鲁棒性波前测量。
技术研发人员:刘生虎,官泓利,王帅,杨康建,赵旺
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!