二维子阵级稀疏阵列FPMIMO雷达收发波束合成方法
本发明属于雷达天线阵列数字波束形成设计,具体涉及一种二维子阵级稀疏阵列fpmimo雷达收发波束合成方法。
背景技术:
1、目前,基于子阵的阵列天线波束形成算法研究以子阵划分方式研究为主,由于目前的hpmimo(hybrid phased-multiple-input-multiple-output,混合相控阵-多输入多输出)雷达仅考虑了发射天线的相控阵处理,而没有考虑接收信号时的相干处理增益,其输出信号的sinr(信干噪比)低于fpmimo雷达,更没有结合二维子阵级稀疏阵列进行研究。现阶段对二维子阵级稀疏阵列的fpmimo雷达收发波束形成算法的研究成果极少,并且在算法稳健性和稀疏阵列fpmimo雷达稳健收发波束形成算法的研究方面还存在明显不足,显示出在增强期望目标回波信号的同时无法对干扰信号进行有效抑制造成接收信号的sinr较低的问题,无法满足已经产生的相应的工程应用背景需求。
技术实现思路
1、本发明的目的在于,提供一种二维子阵级稀疏阵列fpmimo雷达收发波束合成方法,以解决现有算法稳健性不足,在增强期望目标回波信号的同时无法有效抑制干扰造成的接收信号sinr较低的问题。
2、为了实现上述目的,本发明采用如下技术方案予以解决:
3、一种二维子阵级稀疏阵列fpmimo雷达收发波束合成方法,包括如下步骤:
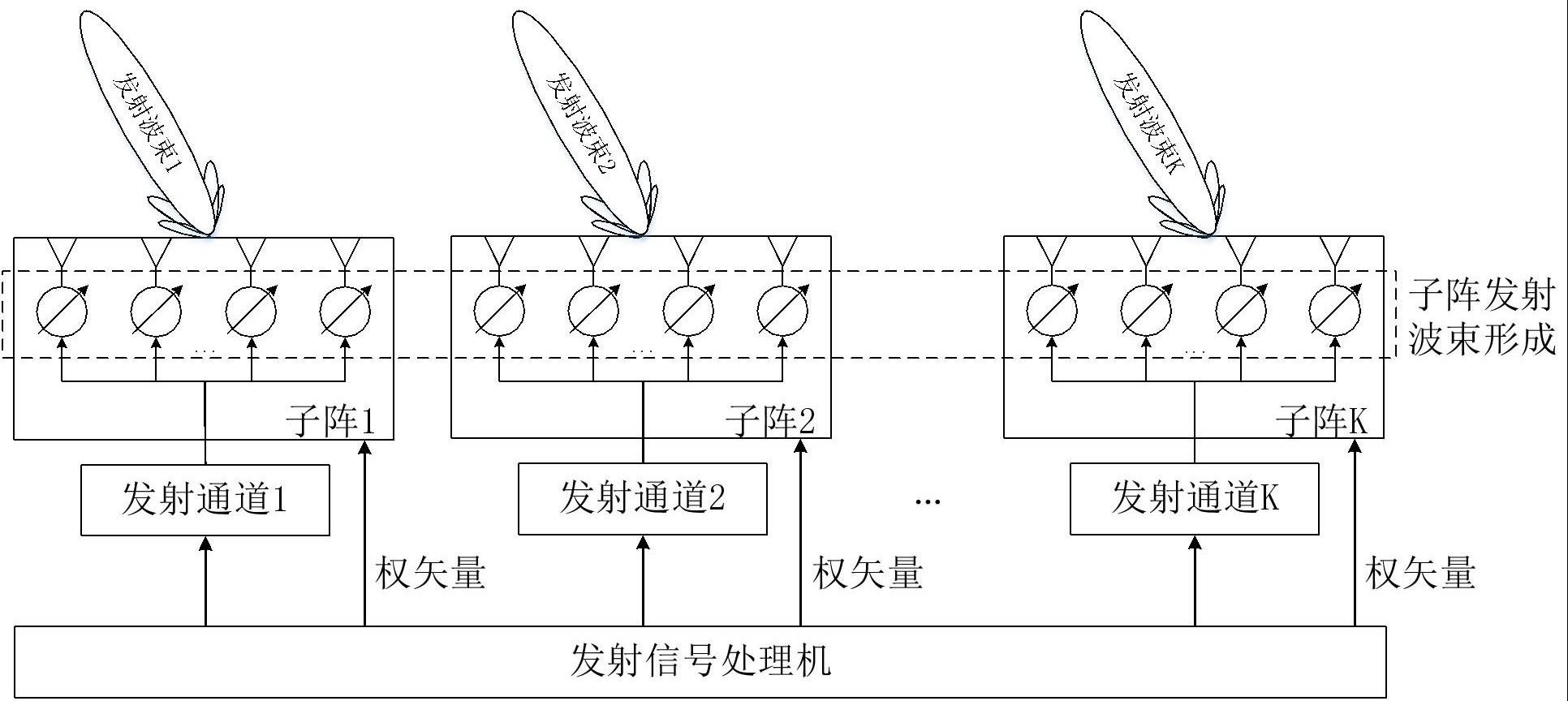
4、步骤1:二维子阵级稀疏阵列fpmimo雷达中的所有子阵在发射信号权矢量的控制下,以相控阵方式向目标方向发射相互正交的lfm信号;二维子阵级稀疏阵列fpmimo雷达中的子阵个数为k;
5、步骤2:每个子阵分别以相控阵方式接收回波得到一路数字信号,共得到k路数字信号;再将每一路数字信号分别进行k路mf处理,共得到k²路数据,作为虚拟扩展阵列样本数据;
6、步骤3:采用下式计算虚拟扩展阵列样本数据的协方差矩阵:
7、
8、式中:
9、—虚拟扩展阵列样本数据的协方差矩阵;
10、 l—回波的采样快拍数;
11、—虚拟扩展阵列样本数据;
12、—共轭转置矩阵;
13、步骤4,计算虚拟扩展阵列的导向矢量:
14、
15、
16、式中:
17、—虚拟扩展阵列的导向矢量;
18、—信号发射的相干处理增益矢量;
19、—波形分集矢量;
20、—接收信号的相干处理增益矢量;
21、 φ—方位角;
22、 θ—俯仰角;
23、w1、w2、…、wk—第1~k个子阵的均匀加权的权矢量,w1= w2=…=wk=;
24、—共轭转置矩阵;
25、—转置矩阵;
26、—第1~k个子阵的发射信号导向矢量,
27、;
28、vec— vec函数,用于将一个矩阵向量化处理;
29、
30、 j—虚数单位;
31、—指数函数;
32、 fc—发射信号载波频率;
33、 d—子阵内相邻阵元间距;
34、 c—光速;
35、 x1、 x2、…、 xk—第1~k个子阵的位置 x坐标;
36、 y1、 y2、…、 yk—第1~k个子阵的位置 y坐标;子阵的位置定义为该子阵左下角阵元所在的位置;第1个子阵的位置( x1, y1) =(0,0);
37、u1、u2、…、uk—第1~k个子阵的子阵内部的信号接收权矢量,u1=u2=…=uk=;
38、 n1、 n2—子阵的行数和列数;
39、步骤5:通过下式获取采样信号的空间谱估计:
40、
41、式中:
42、—采样信号的空间谱估计;
43、 φ—方位角;
44、 θ—俯仰角;
45、—虚拟扩展阵列的导向矢量;
46、—共轭转置矩阵;
47、—逆矩阵;
48、步骤6:对步骤5获得的采样信号的空间谱估计进行峰值提取,得到 s+1个回波信号方向:,其中,为目标方向,为 s个干扰信号的来波方向,由下式计算干扰信号的几何中心角度:
49、
50、式中:
51、—干扰信号的几何中心角度;
52、 i—第i个干扰信号的来波方向;
53、—第i个干扰信号的来波的方位角;
54、—第i个干扰信号的来波的俯仰角;
55、步骤7:所有子阵均以干扰信号的几何中心角度为波束指向发射信号,构建虚拟扩展阵列的incm;
56、步骤8:采用下式重构虚拟扩展阵列的信号协方差矩阵:
57、
58、式中:
59、—虚拟扩展阵列的信号协方差矩阵;
60、—虚拟扩展阵列的导向矢量;
61、—方位向的角度偏差;
62、—俯仰向的角度偏差;
63、—目标的方位角;
64、—目标的俯仰角;
65、步骤9:采用下式对虚拟扩展阵列的信号协方差矩阵进行特征值分解,并估计信号导向矢量vd;
66、
67、vd=vmax
68、式中:
69、v—由特征向量构成的矩阵;
70、d—由特征值构成的对角矩阵;
71、—特征值分解操作;
72、vd—信号导向矢量;
73、vmax—最大特征值对应的特征向量;
74、步骤10:采用下式计算fpmimo雷达收发波束形成权矢量wtr:
75、
76、式中:
77、wtr—雷达收发波束形成权矢量;
78、—虚拟扩展阵列采样数据的incm;
79、vd—信号导向矢量;
80、—共轭转置矩阵;
81、步骤11:采用下式计算fpmimo雷达收发波束形成输出数据yout:
82、
83、式中:
84、yout—雷达收发波束形成输出数据;
85、—虚拟扩展阵列样本数据。
86、进一步的,步骤1中,k为6~30。
87、进一步的,方位角 φ的取值范围为,俯仰角 θ的取值范围为。
88、进一步的,步骤7包括如下子步骤:
89、步骤71,调整所有子阵的发射信号波束指向为进行信号发射,采用下式计算子阵的发射波束形成权矢量wt,每个子阵在发射波束形成权矢量wt的控制下以相控阵方式向方向发射相互正交的lfm信号;
90、
91、式中:
92、wt—子阵的发射波束形成权矢量;
93、c—约束向量构成的矩阵;
94、—子阵 k在方向上的导向矢量; k∈[1,k];
95、—目标方向;
96、—目标的方位角;
97、—目标的俯仰角;
98、—子阵 k在目标方向上的导向矢量;
99、—共轭转置矩阵;
100、步骤72,每个子阵分别以相控阵方式接收回波,获得干扰加噪声的采样信号;将干扰加噪声的采样信号转换为k路数字信号,然后将每路数字信号分别通过k路mf处理得到估计的虚拟扩展阵列干扰加噪声信号;
101、步骤73,通过下式计算得到虚拟扩展阵列采样数据的incm;
102、
103、式中:
104、—虚拟扩展阵列采样数据的incm;
105、 l—回波的采样快拍数;
106、—虚拟扩展阵列干扰加噪声信号;
107、—共轭转置矩阵。
108、进一步的,步骤8中,方位向的角度偏差取3~5°,俯仰向的角度偏差取3~5°。
109、相较于现有技术,本发明具有如下技术效果:
110、1、通过在子阵内部采用相控阵收发信号模式,增强了在目标方向信号的发送和接收能力,同时通过匹配滤波(mf处理)扩展了信号自由度,提高了干扰抑制性能。
111、2、通过估计虚拟扩展阵列的导向矢量,提高了收发波束形成的指向精度,增强了对期望信号的接收能力,并通过发射指向干扰信号方向的探测信号,获取虚拟扩展阵列的incm,提高了对干扰信号的抑制能力,从而有效解决了算法稳健性不足的问题。
112、综上,本发明的方法中,子阵内部以相控阵方式发射和接收信号,子阵之间工作在mimo模式,利用mf处理技术对子阵采样数据进行虚拟扩展,通过虚拟阵列导向矢量估计和虚拟扩展阵列incm的获取,得到fpmimo雷达子阵的收发波束形成权矢量,从而利用虚拟扩展数据进行空域滤波处理,在增强期望目标回波信号的同时对干扰信号进行有效抑制,提高了接收信号的sinr。
- 还没有人留言评论。精彩留言会获得点赞!