基于2D衍射光栅的旋转轴系五自由度误差同步测量装置
本发明属于精密测量领域,尤其涉及一种基于2d衍射光栅的旋转轴系五自由度误差同步测量装置。
背景技术:
1、旋转轴是组成精密机械结构的重要零件之一,是大部分仪器和工业产品的重要组成部分,如三轴数控机床中的旋转轴、减速器中的齿轮轴和精密航天器中的旋转轴等。旋转轴在工作时既承受弯矩又承受转矩,有旋转倾斜误差、径向误差和轴向误差等误差,影响精密机械结构的准确度和精密度。
2、现阶段,对于旋转轴系误差的检测方法主要有光学测量方法和非光学测量方法两类。光学测量方法有北京交通大学李家琨等人发明的利用环形光栅和角锥棱镜结合测量旋转轴系自由度等,非光学测量方法有球杆仪和lei等人发明的3d测头测量旋转轴系自由度等。上述光学测量方法测量精度高,但是结构较为复杂,安装过程复杂。非光学测量方法结构简单,但是属于接触测量,测量精度不高。
3、申请人的在先申请号为2023105286112、名称为旋转轴系五自由度误差运动高精度测量装置及测量方法的发明专利申请,提出了一种基于衍射原理的旋转轴系五自由度误差运动高精度测量装置及测量方法,通过自准直原理得到俯仰运动的初步位移。通过小孔衍射现象,得到较高的光斑成像分辨率,四象限探测器捕捉到的光斑边缘部分更加清晰,提高了装置的精度。
4、针对上述存在的问题,亟需设计一种旋转轴系五自由度误差同步测量方法,以解决传统方法存在的问题。首先是结构简单,安装方便,一体化程度高。其次是光学方法属于非接触测量,测量精度高。最后是成本较低,价格便宜,并且辅以自准直模块来提高测量精度。
技术实现思路
1、本发明的目的是设计一种基于2d衍射光栅的旋转轴系五自由度误差同步测量装置,用来测量旋转轴系工作时的五自由度误差,分别是俯仰角误差、偏摆角误差和x轴、y轴、z轴方向上的误差。从而实现旋转轴系工作时倾斜误差、径向误差和轴向误差的测量。
2、为实现上述发明目的,本发明的方案是:
3、一种基于2d衍射光栅的旋转轴系五自由度误差同步测量装置,包括光源和信号检测模块和组合目标模块,光源和信号检测模块实现光源发射和信号检测的功能,组合目标模块实现被测对象与组合反射镜结合的功能;其中,
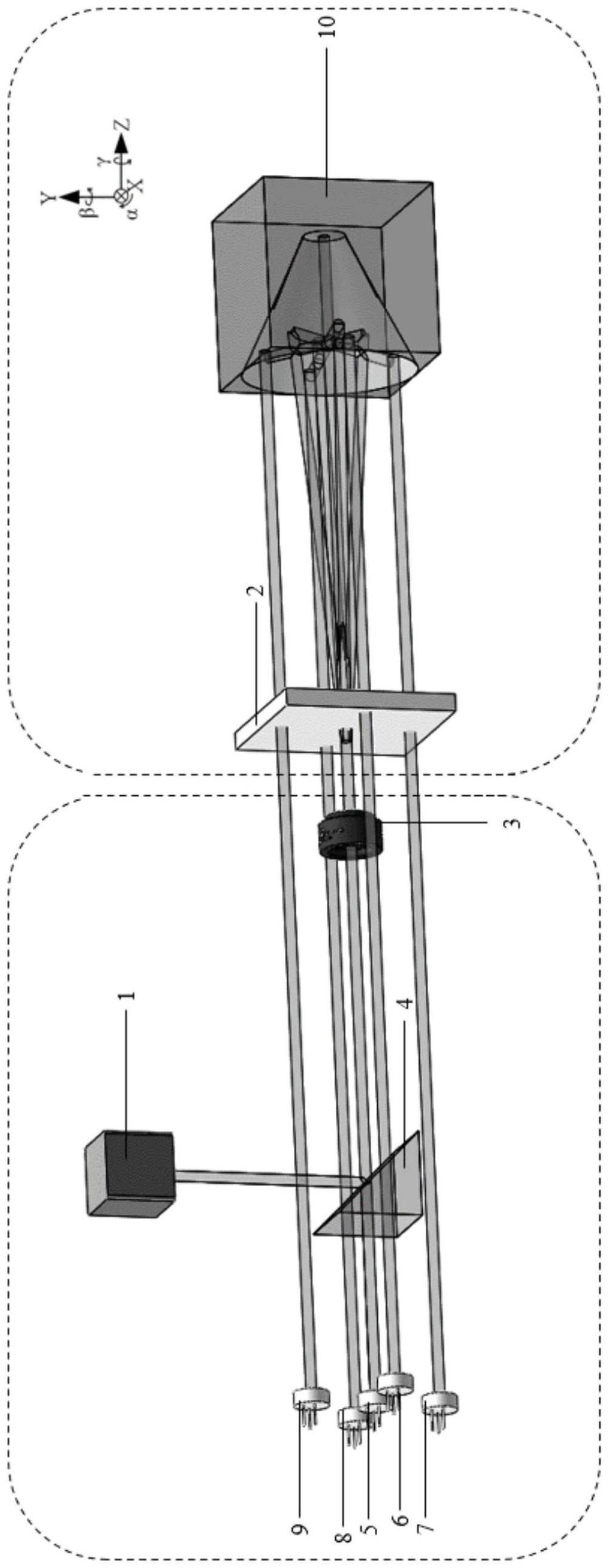
4、所述的光源和信号检测模块包括,632.8nm氦氖激光光源(1)、折光镜(4)、5个四象限探测器qpd1(5)、qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)以及消色差透镜l1(3);
5、其中,所述消色差透镜l1(3)放置于折光镜(4)和平面二维衍射光栅(2)之间;所述5个四象限探测器qpd1(5)、qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)放置在折光镜(4)后;
6、所述组合目标模块安装在被测旋转轴上,所述组合目标模块包括平面二维衍射光栅(2)和一个组合反射镜(10);其中,组合反射镜(10)为测量专用棱镜,融合内锥形反射镜(1001)与平面反射镜(1002)为一体,内锥形反射镜(1001)的内底面为一个平面反射镜(1002);
7、所述光源和信号检测模块中,632.8nm氦氖激光光源(1)出射光进入折光镜(4)中,部分光经过折光镜(4)到达四象限探测器qpd1(5);部分光经过折光镜(4)到达消色差透镜l1(3),变为平行光出射到达平面二维衍射光栅(2),平面二维衍射光栅(2)的作用是分光,当入射光经过平面二维衍射光栅(2)时,形成多次衍射,经过折光单元,形成5束衍射光出射,5束衍射光经过组合反射镜(10)的反射后分别被四象限探测器qpd1(5)、qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)捕捉;
8、其中,消色差透镜l1(3)作为准直透镜,与四象限探测器qpd1(5)构成自准直单元;
9、所述四象限探测器qpd1(5)通过对比初始光和反射后的光的位置,可测出旋转轴系工作时俯仰角误差α和偏摆角误差β;
10、所述旋转轴系在工作时通过四象限探测器qpd2(6)、qpd4(8)对反射光位置的捕捉可以测出旋转轴系工作时x轴方向上的误差δx;
11、所述旋转轴系在工作时通过四象限探测器qpd2(7)、qpd4(9)对反射光位置的捕捉可以测出旋转轴系工作时y轴方向上的误差δy;
12、所述旋转轴系在工作时通过四象限探测器qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)对反射光位置的捕捉可以测出旋转轴系工作时z轴方向上的误差δz。
13、本发明提供的进一步的优选技术方案是,所述组合反射镜(10)内表面为光滑的内锥形,内锥形底部融合一个平面反射镜(1002),平面反射镜(1002)用于测量旋转轴系工作时的偏摆角误差α和俯仰角误差β,组合反射镜(10)的顶部为内锥形反射镜(1001),用于测量旋转轴系工作时的x轴方向上的误差δx、y轴方向上δy的误差和z轴方向上的误差δz,从而实现旋转轴系工作时五自由度误差的测量。
14、本发明提供的另外的优选技术方案是,经平面二维透射光栅(2)后通过平面反射镜(1002)反射的零阶衍射光束设定为i0,用于检测俯仰角误差α和偏摆角误差β,被四象限探测器qpd1(5)捕捉;
15、经平面二维透射光栅(2)后通过内锥形反射镜(1001)反射的一阶衍射光束设定为i2、i4,用于检测x轴方向上的误差,被四象限探测器qpd2(6)、qpd4(8)捕捉;
16、经平面二维透射光栅(2)后通过内锥形反射镜(1001)反射的一阶衍射光束设定为i3、i5,用于检测y轴方向上的误差,被四象限探测器qpd2(7)、qpd4(9)捕捉;
17、则i1、i2、i3、i4为经平面二维透射光栅(2)后通过内锥形反射镜(1001)反射的一阶衍射光束,用于检测z轴方向上的误差,被四象限探测器qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)捕捉;
18、i0作为测量光束到达作为准直透镜的消色差透镜l1(3)和四象限探测器qpd1(5)组成的自准直单元,四象限探测器qpd1(5)位于准直透镜l1(3)的焦平面上,用于检测聚焦在四象限探测器qpd1(5)上的反射光束光斑的俯仰角误差α和偏摆角误差β;俯仰角误差α和偏摆角误差β与四象限探测器qpd1(5)上x轴方向位移和y轴方向位移有如下关系:
19、
20、f为消色差透镜l1(3)的焦距;δxqpd1为俯仰角误差α在x轴方向位移,δyqpd1为偏摆角误差β在y轴方向位移;
21、i1、i2、i3、i4在四象限探测器qpd2(6)、qpd3(7)、qpd4(8)、qpd5(9)上的x轴方向上坐标和y轴方向上坐标分别是xqpd2、xqpd3、xqpd4、xqpd5和yqpd2、yqpd3、yqpd4、yqpd5,则z轴方向上的误差δz满足:
22、
23、其中,为x轴方向上坐标与x轴方向上的误差δx之间的隐函数,为y轴方向上坐标与y轴方向上的误差δy之间的隐函数,为x轴方向上坐标和y轴方向上坐标与z轴方向上的误差δz之间的隐函数。
24、现有技术相比较,本发明的有益效果是:
25、本发明专利基于2d衍射光栅的旋转轴系五自由度误差的测量装置,所用棱镜和其他光学结构装置成本较低。本发明相比于传统测量仪器设备而言,集成度高,可实现对旋转轴系五自由度误差的一次性测量。在装置中设计自准直单元,对于组合反射镜(10)中的平面反射镜(1002),可以测出旋转轴系工作时的俯仰角误差和偏摆角误差;对于组合反射镜(10)中的内锥形反射镜(1001),可以测出旋转轴系工作时x轴方向上的误差、y轴方向上的误差和z轴方向上的误差。最终实现对旋转轴系倾斜误差、径向误差和轴向误差的测量。
- 还没有人留言评论。精彩留言会获得点赞!