磁共振B0涡流补偿方法、装置和存储介质与流程
本技术涉及磁共振的领域,尤其是涉及一种磁共振b0涡流补偿方法、装置和存储介质。
背景技术:
1、磁共振指的是自旋磁共振现象。其意义上较广,包含核磁共振、电子顺磁共振或称电子自旋共振。人们日常生活中所说的磁共振是指磁共振成像,其是利用核磁共振现象制成的一类用于医学检查的成像设备。
2、只要存在变化的磁场,就会在附近的导体中产生电流。因为它们像河流中的涡流一样旋转,所以被称为“涡流”。涡流会降低梯度切换的速度和效率,变化的梯度会产生涡流,会造成x、y、z三个轴梯度本身的失真,同时也会造成b0主磁场出现偏移,b0主磁场发生偏移会导致图像出现伪影等问题。
技术实现思路
1、为了解决b0主磁场发生偏移会导致图像出现伪影的问题,本技术提供了一种磁共振b0涡流补偿方法、装置和存储介质。
2、本技术提供的一种磁共振b0涡流补偿方法,采用如下的技术方案:
3、第一方面,提供一种磁共振b0涡流补偿方法,包括:
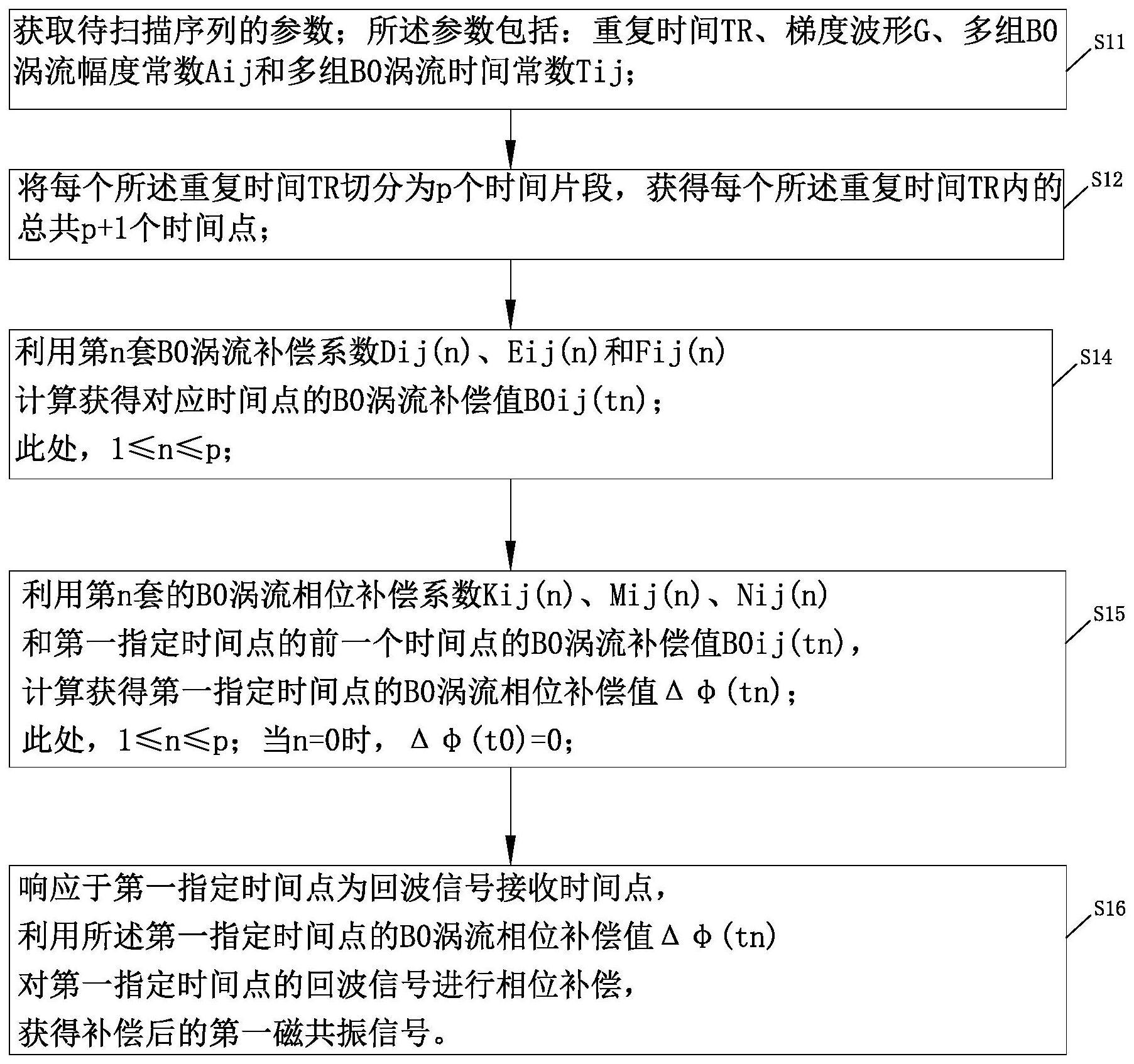
4、获取待扫描序列的参数;所述参数包括:重复时间tr、梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij;
5、将每个所述重复时间tr切分为p个时间片段,获得每个所述重复时间tr内的总共p+1个时间点;
6、利用所述梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij,计算获得p套b0涡流补偿系数dij(n)、eij(n)和fij(n),以及b0涡流相位补偿系数kij(n)、mij(n)和nij(n);此处,1≤n≤p;
7、利用第n套b0涡流补偿系数dij(n)、eij(n)和fij(n)计算获得对应时间点的b0涡流补偿值b0ij(tn);此处,1≤n≤p;当n=0时,b0ij(t0)=0;
8、利用第n套的b0涡流相位补偿系数kij(n)、mij(n)、nij(n)和第一指定时间点的前一个时间点的b0涡流补偿值b0ij(tn),计算获得第一指定时间点的b0涡流相位补偿值此处,1≤n≤p;当n=0时,响应于第一指定时间点为回波信号接收时间点,利用所述第一指定时间点的b0涡流相位补偿值对第一指定时间点的回波信号进行相位补偿,获得补偿后的第一磁共振信号。
9、第二方面,还提供一种磁共振b0涡流补偿方法,包括:
10、获取待扫描序列的参数;所述参数包括:重复时间tr、梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij;
11、将每个所述重复时间tr切分为p个时间片段,获得每个所述重复时间tr内的总共p+1个时间点;
12、利用所述梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij,计算获得p套b0涡流补偿系数dij(n)、eij(n)和fij(n),以及b0涡流相位补偿系数kij(n)、mij(n)和nij(n);此处,1≤n≤p;
13、利用第n套b0涡流补偿系数dij(n)、eij(n)和fij(n)计算获得对应时间点的b0涡流补偿值b0ij(tn);此处,1≤n≤p;当n=0时,b0ij(t0)=0;
14、利用第n套的b0涡流相位补偿系数kij(n)、mij(n)、nij(n)和第一指定时间点的前一个时间点的b0涡流补偿值b0ij(tn),计算获得第一指定时间点的b0涡流相位补偿值此处,1≤n≤p;当n=0时,利用b0涡流补偿值b0ij(tn),0≤n≤p,以及旋磁比γ,计算获得第二指定时间点的b0涡流频率校正值δω(tn);
15、响应于第二指定时间点为第一射频信号发射时间,利用所述第二指定时间点的b0涡流相位补偿值对第二指定时间点的所述第一射频信号进行相位补偿;利用所述第二指定时间点的b0涡流频率校正值δω(tn)对所述第一射频信号进行频率校正;获得补偿和校正后的第二射频信号;
16、发射所述第二射频信号,并接收由所述第二射频信号和梯度波形g产生的补偿了b0涡流的第二磁共振信号。
17、优选的,还包括:
18、将所述每个重复时间tr内的第p+1个时间点的b0涡流补偿值b0ij(tn)和b0涡流相位补偿值作为下一个重复时间tr的第一个时间点的b0涡流补偿值b0ij(tn)和b0涡流相位补偿值
19、利用所述下一个重复时间tr的第一个时间点的b0涡流补偿值b0ij(tn)和b0涡流相位补偿值以及所述p套b0涡流补偿系数dij(n)、eij(n)和fij(n),以及b0涡流相位补偿系数kij(n)、mij(n)和nij(n)作为基础,计算获得所述下一个重复时间tr内第三指定时间点的b0涡流相位补偿值和/或b0涡流频率校正值δω(tn),用于补偿或校正所述下一个重复时间tr内第三指定时间点的射频信号或回波信号。
20、优选的,所述将每个所述重复时间tr切分为p个时间片段,获得总共p+1个时间点,之后,还包括:
21、将所述p+1个时间点应包括:s次射频发射时间和r次回波接收时间;并且,p+1≥s+r;优选的,利用第n套b0涡流补偿系数dij(n)、eij(n)和fij(n)计算获得对应时间点的b0涡流补偿值b0ij(tn);此处,1≤n≤p;当n=0时,b0ij(t0)=0;包括:
22、将所述梯度波形g拆分为固定波形ge和幅度随周期变化波形ga;并且,g=ge+ga;
23、利用所述固定波形部分ge,计算获得所述每个时间片段内由固定波形ge的变化产生的b0涡流补偿值b0ij(tn)公式中所需的系数dij(n),计算公式如下:
24、
25、上述公式中,i为多组b0涡流幅度常数aij或多组b0涡流时间常数tij的个数,j为x、y、z三个梯度轴;tn-1至tn,表示所述n个时间片段内的任一个时间片段;
26、对初始tn-1时刻已产生的涡流随时间衰减所剩余的涡流部分计算,获得从tn-1到tn时刻梯度波形g消失后随时间衰减变化的b0涡流补偿值b0ij(tn)公式中所需的系数eij(n),计算公式如下:
27、
28、对所述幅度随周期变化波形部分ga计算,获得从tn-1到tn时刻由幅度随周期变化波形部分变化产生的b0涡流补偿值b0ij(tn)公式中所需的系数fij(n),计算公式如下:
29、
30、上述公式中,ga1为ga归一化后的波形;
31、计算获得tn时间点的b0涡流补偿值b0ij(tn),包括:
32、b0ij(tn)=dij(n)+eij(n)·b0ij(tn-1)+fij(n)·|ga|j
33、其中t0时刻的b0涡流补偿值b0ij(t0)默认为零。
34、优选的,利用第n套的b0涡流相位补偿系数kij(n)、mij(n)、nij(n)和第一指定时间点的前一个时间点的b0涡流补偿值b0ij(tn),计算获得第一指定时间点的b0涡流相位补偿值此处,1≤n≤p;当n=0时,包括:
35、将所述梯度波形g拆分为固定波形ge和幅度随周期变化波形ga;并且,g=ge+ga;对所述固定波形部分ge,计算获得每个时间片段内由固定波形ge的变化产生的b0涡流相位补偿值公式中所需的系数kij(n),计算公式如下:
36、
37、上述公式中,i为多组涡流补偿参数的个数,j为x、y、z三个梯度轴;tn-1至tn,表示所述n个时间片段内的任一个时间片段;γ为旋磁比;
38、对初始tn-1时刻已产生的涡流随时间衰减所剩余的涡流部分计算,获得从tn-1到tn时刻梯度波形g消失后随时间衰减变化的b0涡流相位补偿值公式中所需的系数mij(n),计算公式如下:
39、
40、对梯度信号中的幅度随周期变化波形部分ga计算,获得从tn-1到tn时刻由幅度随周期变化波形部分变化产生的b0涡流相位补偿值公式中所需的系数nij(n),计算公式如下:
41、计算得到第一指定时间点或第二指定时间点的b0涡流相位补偿值计算公式如下,
42、
43、其中t0时刻的b0涡流相位补偿值默认为零;m表示m组b0涡流幅度常数aij或m组b0涡流时间常数tij。
44、优选的,所述利用b0涡流补偿值b0ij(tn),0≤n≤z,以及旋磁比γ,计算获得第二指定时间点的b0涡流频率校正值δω(tn),包括:计算公式如下,
45、
46、m表示m组b0涡流幅度常数aij或m组b0涡流时间常数tij。
47、第三方面,还提供一种磁共振b0涡流补偿装置,包括:
48、获取模块:用于获取待扫描序列的参数;所述参数包括:重复时间tr、梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij;
49、切分模块:用于将每个所述重复时间tr切分为p个时间片段,获得每个所述重复时间tr内的总共p+1个时间点;
50、第一计算模块:用于利用所述梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij,计算获得p套b0涡流补偿系数dij(n)、eij(n)和fij(n),以及b0涡流相位补偿系数kij(n)、mij(n)和nij(n);此处,1≤n≤p;利用第n套b0涡流补偿系数dij(n)、eij(n)和fij(n)计算获得对应时间点的b0涡流补偿值b0ij(tn);此处,1≤n≤p;当n=0时,b0ij(t0)=0;
51、第二计算模块:用于利用第n套的b0涡流相位补偿系数kij(n)、mij(n)、nij(n)和第一指定时间点的前一个时间点的b0涡流补偿值b0ij(tn),计算获得第一指定时间点的b0涡流相位补偿值此处,1≤n≤p;当n=0时,第一补偿模块:用于响应于第一指定时间点为回波信号接收时间点,利用所述第一指定时间点的b0涡流相位补偿值对第一指定时间点的回波信号进行相位补偿,获得补偿后的第一磁共振信号。
52、第四方面,一种磁共振b0涡流补偿装置,包括:
53、获取模块:用于获取待扫描序列的参数;所述参数包括:重复时间tr、梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij;
54、切分模块:用于将每个所述重复时间tr切分为p个时间片段,获得每个所述重复时间tr内的总共p+1个时间点;
55、第一计算模块:用于利用所述梯度波形g、多组b0涡流幅度常数aij和多组b0涡流时间常数tij,计算获得p套b0涡流补偿系数dij(n)、eij(n)和fij(n),以及b0涡流相位补偿系数kij(n)、mij(n)和nij(n);此处,1≤n≤p;利用第n套b0涡流补偿系数dij(n)、eij(n)和fij(n)计算获得对应时间点的b0涡流补偿值b0ij(tn);此处,1≤n≤p;当n=0时,b0ij(t0)=0;
56、第三计算模块:用于利用第n套的b0涡流相位补偿系数kij(n)、mij(n)、nij(n)和第一指定时间点的前一个时间点的b0涡流补偿值b0ij(tn),计算获得第一指定时间点的b0涡流相位补偿值此处,1≤n≤p;当n=0时,
57、第四计算模块:用于利用b0涡流补偿值b0ij(tn),0≤n≤z,以及旋磁比γ,计算获得第二指定时间点的b0涡流频率校正值δω(tn);
58、第二补偿模块:用于响应于第二指定时间点为第一射频信号发射时间,利用所述第二指定时间点的b0涡流相位补偿值对第二指定时间点的所述第一射频信号进行相位补偿;利用所述第二指定时间点的b0涡流频率校正值δω(tn)对所述第一射频信号进行频率校正;获得补偿和校正后的第二射频信号;
59、第一接收模块:用于发射所述第二射频信号,并接收由所述第二射频信号和梯度波形g产生的补偿了b0涡流的第二磁共振信号。
60、第五方面,还提供一种计算机可读存储介质,包括:存储有可被处理器加载,并执行如上述技术方案中任一所述方法的计算机程序。
61、综上所述,本技术包括以下至少一种有益技术效果:
62、本技术通过模块化部分预处理方式加速b0涡流补偿,兼顾了实时快速、低消耗和高精度的需求。
- 还没有人留言评论。精彩留言会获得点赞!