StaggeredSAR体制下三维摆动舰船目标成像重建方法
本发明属于微波遥感。
背景技术:
1、海面舰船目标sar成像对高分辨率宽测绘带提出迫切需求。高分辨率的sar图像提供了海上目标的宝贵信息,例如在低分辨率图像中很难被检测出来的小型船只,有助于识别船只类型与海上安全、监测和管理相关的信息。广阔的覆盖范围(即幅宽)使得卫星能够更频繁地对广阔的海上区域进行观测,以便观察这些区域的变化。现有的高分辨率宽(hrws)系统主要用于静止场景成像,但对于运动目标的成像受限。典型的hrws sar系统采用沿方位方向排列的多个接收通道,结合了运动目标指示(mti)系统,以实现杂波抑制和运动目标成像。然而,低脉冲重复频率(prf)的操作会加剧方位模糊,而且天线尺寸长,增加了系统复杂度。staggered sar(变脉冲重复频率合成孔径雷达)通过变脉冲重复周期(pri)结合俯仰维多波束技术可以实现连续无盲区的高分宽幅成像,该技术拟被应用于tandem-l和nisar卫星。由于接收和发射时序的冲突,方位维的回波会存在脉冲缺失和非均匀采样,需要进行重建。然而,现有的重建算法是针对静止场景设计的,对于复杂的运动目标会产生明显的图像虚焦。相较于传统的均匀采样,staggered sar体制本身存在的非均匀采样会导致频谱发生混叠,而动目标的复杂运动会加重频谱混叠的程度,导致舰船目标成像发生散焦,降低重建效果。
技术实现思路
1、本发明是为了解决现有staggered sar体制下三维摆动舰船目标成像频谱混叠严重,散焦严重的问题,现提供一种staggered sar体制下三维摆动舰船目标成像重建方法。
2、本发明所述staggered sar体制下三维摆动舰船目标成像重建方法,包括:
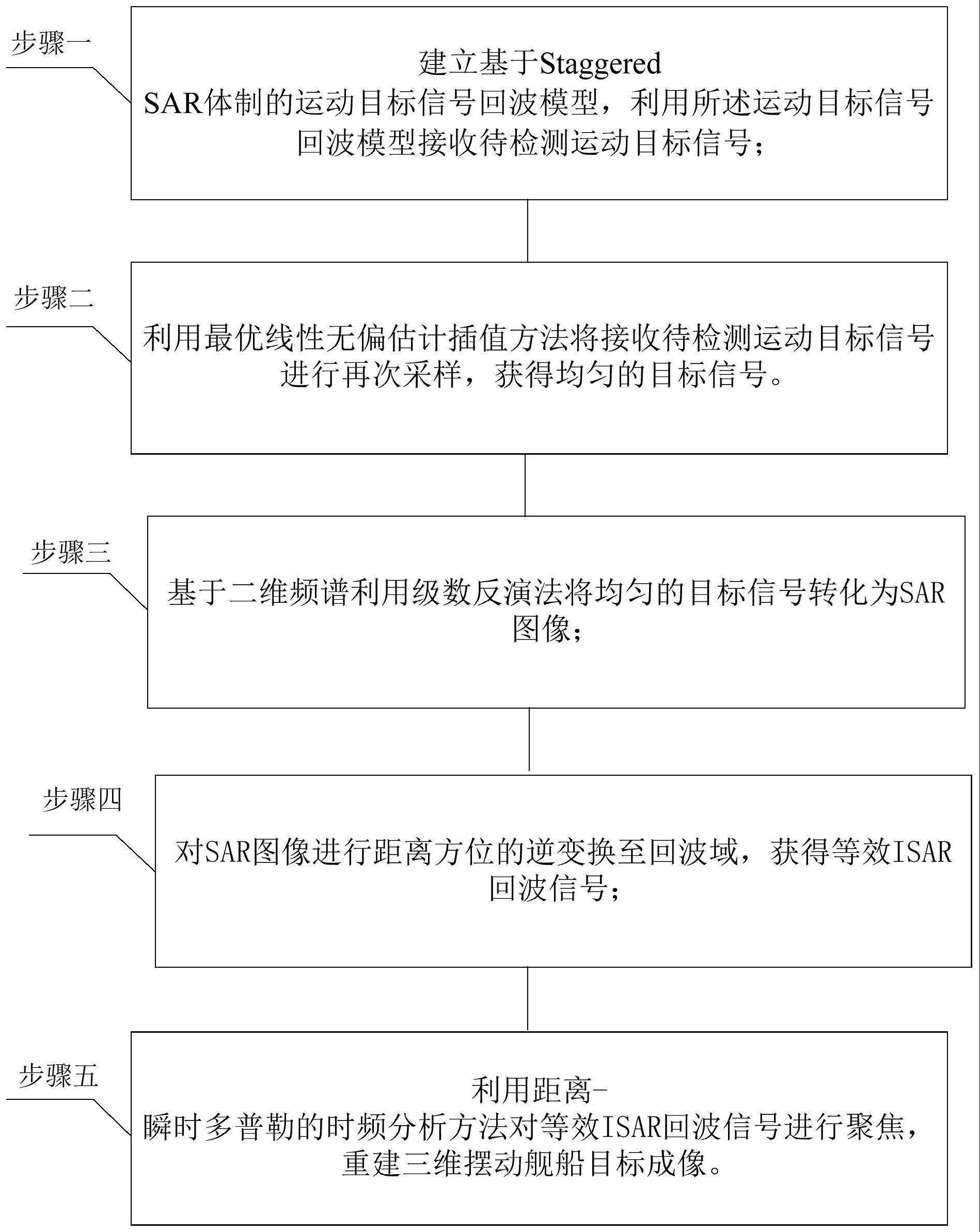
3、步骤一:建立基于staggered sar体制的运动目标信号回波模型,利用所述运动目标信号回波模型检测运动目标的回波信号;
4、步骤二:利用最优线性无偏估计插值方法将检测的运动目标的回波信号进行采样,获得均匀的目标信号;
5、步骤三:基于二维频谱利用级数反演法将均匀的目标信号转化为sar图像;
6、步骤四:对sar图像进行距离方位逆变换至回波域,获得等效isar回波信号;
7、步骤五:利用距离-瞬时多普勒的时频分析方法对等效isar回波信号进行聚焦,重建三维摆动舰船目标成像。
8、进一步地,本发明中,步骤一中,建立基于staggered sar体制的运动目标信号回波模型为:
9、
10、其中,sr(tr,ta)表示基于staggered sar体制的运动目标信号回波信号,tr是快时间域,ta为慢时间域,σi为第i个散射点的散射系数,λ为波长,γ为调频斜率,wa(·)为方位维窗函数,当脉冲发生丢失时,盲区矩阵b(tr,ta)值为0,当脉冲被完全接收时,盲区矩阵b(tr,ta)值为1,ri(ta)为卫星与第i个散射点之间的斜距,wr(·)为距离维窗函数,c为光速,tp为脉冲持续时间。
11、进一步地,本发明中,卫星与第i个散射点之间的斜距ri(ta)为:
12、
13、其中,k0是由雷达平台的运动引入的常数项,k1是由雷达平台运动引入的一阶项系数,k2是由雷达平台运动引入的二阶项系数,k3是由雷达平台运动引入的三阶项系数;δk0是由目标运动引入的常数项,δk1是由目标运动引入的一阶项系数,δk2是由目标运动引入的二阶项系数,δk3是由目标运动引入的三阶项系数;ri0(ta)为船体存在三维摆动时,第i个散射点在目标坐标系中的位置,rs0(ta)为卫星在目标坐标系中的位置。
14、进一步地,卫星在目标坐标系中的位置rs0(ta)为:
15、
16、其中,为坐标旋转矩阵,rt为从点p指向船目标的向量,点p为卫星传感器波束指向方向与地球表面的交点,所述oeze轴为地球角动量方向;rs(ta)为考虑到地球角速度和弯曲轨道时雷达在p-xyz坐标下的位置坐标。
17、进一步地,本发明中,船体存在三维摆动时,第i个散射点在目标坐标系中的位置ri0(ta)为:
18、
19、其中,xi0,yi0,zi0为舰船目标上的第i个散射点初始时刻在p-x0y0z0坐标系的位置,v为舰船的平动速度;
20、
21、
22、
23、θroll(ta)、θpitch(ta)、θyaw(ta)为舰船目标在海浪的影响下进行翻滚、俯仰和偏航三维摆动的正弦旋转角度。
24、进一步地,本发明中,θroll(ta)、θpitch(ta)和θyaw(ta)的计算方法相同,具体为:
25、
26、其中,aξ,tξ,φξ分别表示摆动幅度、摆动周期和初始相位。
27、进一步地,本发明中,步骤二中,获得均匀的目标信号为:
28、
29、其中,表示均匀的目标信号,u=[u(t1),u(t2),…u(tq)]t,u(tq)表示方位向实际非均匀采样信号,q=1,……q,g为q行q列的矩阵,所述g的第q行第s列元素表示为gqs:
30、gqs=run(tq-ts),q=1...q,s=1...q;
31、run(tq-ts)表示tq-ts的相关函数,r为列向量,列向量r的第q列元素为:
32、rq=run(tint-tq),q=1...q
33、tint表示待重建的均匀采样时间,tq为由于pri的变化引起的非均匀采样时间。
34、进一步地,tq-ts的相关函数run(tq-ts):
35、
36、
37、
38、
39、snr为信噪比,δ(·)为克罗内克函数,u(t)为方位维回波信号,u*(t)为u(t)的共轭,vs为卫星速度,la为天线方位向孔径长度,ts为均匀采样时间。
40、进一步地,本发明中,步骤三中,基于二维频谱利用级数反演法将均匀的目标信号转化为sar图像为:
41、
42、其中,φaz(fa),φrp,b1(fa),b2(fa)和b3(fa)分别表示为:
43、
44、
45、
46、
47、
48、其中,s2df(fr,fa)表示sar图像,w(fr,fa)为距离-方位二维频域窗函数,fr为距离维频率,fa为方位维频率,exp{-j2πb1(fa)fr}表示距离徙动补偿函数,表示剩余距离补偿函数,表示高阶相位补偿函数;l0=2(k1+δk1),,,
49、l2=3(2k3+δk3)/8(2k2+δk2)3,c为光速,fc为载波中心频率,δk0是由目标运动引入的常数项,k0是由雷达平台的运动引入的常数项。
50、进一步地,本发明中,步骤五中,重建的三维摆动舰船目标成像为:
51、步骤五中,重建的三维摆动舰船目标成像为:
52、
53、其中,spwvd(t,f)为平滑伪魏格纳-维利分布时频分析结果,s(*)为方位维信号,s*(*)为s(*)的共轭,g(·)和h(·)为随时间滑动的第一窗函数和第二窗函数,m为抑制交叉项参数。
54、本发明探究staggered sar体制下具有三维摆动的复杂运动特性舰船目标的成像,实现高分宽幅体制下运动目标的精确聚焦成像。建立弯曲轨道下staggered sar运动目标的信号模型,考虑地球的自转和轨道的弯曲,考虑目标的平动和三维摆动,利用级数反演法推导出二维频谱,实现高阶相位补偿。通过对比实验的结果表明:本发明提出的重建算法可以较为准确地聚焦复杂运动的舰船目标,提高成像效果。
- 还没有人留言评论。精彩留言会获得点赞!