基于DDMA波形调制的MIMO雷达目标检测方法及装置与流程
本发明涉及雷达目标检测,尤其涉及一种基于ddma波形调制的mimo雷达目标检测方法及装置。
背景技术:
1、mimo(multiple-input multiple-output,多输入多输出)雷达是利用多个发射天线同步地发射分集的波形,同时使用多个接收天线接收回波信号。通过mimo技术可以增加雷达的虚拟通道数,从而提高雷达的探测性能。对于一个包含ntx根发射天线、nrx根接收天线的mimo雷达系统,可以采用合适的天线布局和波形设计来形成一个ntx×nrx的虚拟天线阵列,通过对接收信号在期望的方向上做接收dbf(digital beam forming,数字波束合成),可以提升系统在期望方向上的探测增益。而为了形成虚拟天线阵列,发射端必须能够在某个维度将ntx根发射天线的波形复用起来,接收端在收到这个波形后必须能在相同的维度将ntx根发射天线的波形分离出来。
2、ddma(多普勒维多址)是通过将所有发射天线同时发射,每个发射天线的信号都偏移一个特定的频率,使不同发射天线的信号在doppler域上能分离开来。mimo雷达中采用ddma(多普勒维多址)可以实现所有发射天线(ntx根)同时发射,相比于传统tdma(时分多址)方式,可以减少一个脉冲的发射时间,在相同的发射信号时间情况下,能够保证虚拟天线dbf的探测增益。ddma中需要先在接收端对目标信号进行检测,再在接收端对不同发射天线进行分离,即在接收端需要确定发射天线的顺序,在没有确定发射天线顺序之前无法进行虚拟天线dbf,而只能进行接收通道的dbf。因而使用ddma的前提是在目标信号检测阶段能分析出目标信号,否则无法体现出发射天线的dbf增益。
3、现有技术中,mimo雷达中采用ddma方法时,通常是首先对回波信号进行脉冲积累,由于没有分离出发射天线,所以此时仅能进行接收通道dbf,再运用检测算法对接收dbf后的二维数据矩阵进行检测,根据检测出的数值对发射解耦,确定发射天线顺序以用于后续测角等信号处理算法。对于回波信号较强的目标,可以通过脉冲积累增益和接收通道dbf增益来实现目标信号检测,从而确定不同发射天线顺序,再使用虚拟阵列进行测角等算法处理。但是对于回波信号较弱(可能是目标rcs较小,或者是目标距离雷达系统较远等)的目标,通过脉冲积累和接收通道的dbf信号增益仍不足以使得检测到目标信号,即在目标检测阶段不能检测到目标信号,导致不能分离出不同发射天线,无法进行后续算法处理。综上,mimo雷达系统采用ddma对弱目标探测性能不佳,且系统探测距离较近,雷达系统会存在漏报的风险。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、成本低、弱目标探测性能好、探测距离远且漏报率低的基于ddma波形调制的mimo雷达目标检测方法及装置。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种基于ddma波形调制的mimo雷达目标检测方法,步骤包括:
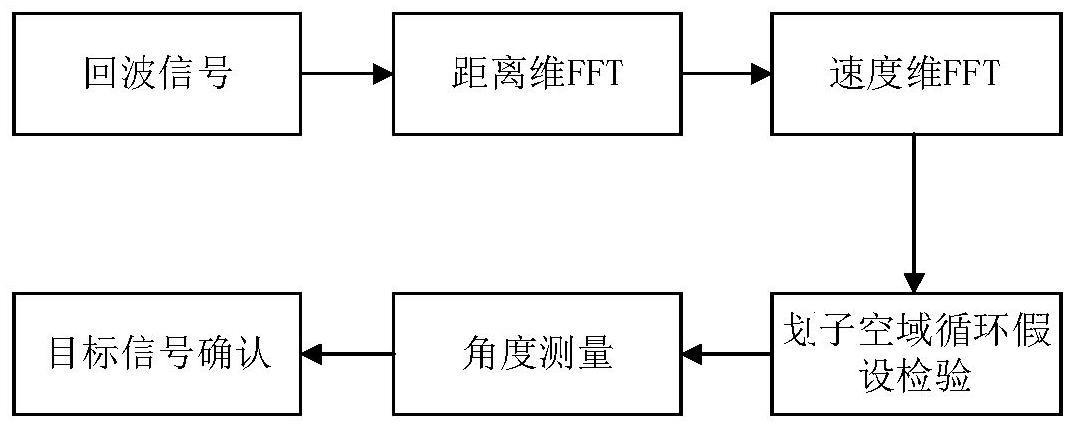
4、接收mimo雷达系统发射的ddma波形的回波信号,依次进行距离维fft(快速傅里叶变换)计算、速度维fft计算,得到距离多普勒数据矩阵;
5、将待搜索空域范围划分为多个子空域,依次对各个所述子空域进行所述距离多普勒数据矩阵的循环假设检验,所述距离多普勒数据矩阵的循环假设检验包括循环假设发射天线顺序并构建虚拟mimo阵列进行dbf,根据每次循环假设得到的虚拟mimo阵列dbf结果判断各个子空域对应方向是否存在目标信号。
6、进一步的,所述循环假设发射天线顺序包括循环假设所有多普勒单元中的部分多普勒单元包含目标信号,提取假设包含目标信号的各多普勒单元,得到假设的发射天线顺序。
7、进一步的,所述构建虚拟mimo阵列进行dbf包括:
8、根据每次假设得到的发射天线顺序所得到的发射天线数据查找对应的接收通道数据;
9、根据查找出的所述接收通道数据确定出的接收通道排列顺序,构建对应的虚拟mimo阵列;
10、根据当前子空域的指向角度对所述虚拟mimo阵列的目标信号向量进行dbf,得到一个合成值输出。
11、进一步的,所述根据每次循环假设得到的虚拟mimo阵列dbf结果判断各个子空域对应的方向是否存在目标信号包括:判断各次假设得到的所述合成值,如果存在多个所述合成值大于预设阈值,则判定对应的子空域方向上存在目标信号,根据所述合成值的最大值所在位置确定得到第一个发射天线所在子空域中的位置,即确定得到发射天线顺序。
12、进一步的,所述循环假设检验中假设检测次数为nchirp,nchirp为多普勒单元长度,每次假设对应一种发射天线通道顺序。
13、进一步的,所述将待搜索空域范围划分为多个子空域范围中,划分的子空域个数为nth,子空域指向角度为θi=-θ+[(i-1)δθ,iδθ],子空域间隔为[-θ,+θ]为待搜索空域范围,θi为第i个子空域的子空域指向角度,i=1,2,…,nth。
14、进一步的,所述依次进行距离维fft计算、速度维fft计算,得到距离多普勒数据矩阵包括:
15、对回波信号的每一个接收通道进行一维的距离维fft计算,得到一维的距离矩阵;
16、对所述距离矩阵中每个距离单元进行脉冲积累以及二维的速度维fft计算,得到所述距离多普勒数据矩阵。
17、根据构建的所述虚拟mimo阵列以及检测到的目标信号进行角度测量;
18、进一步的,所述循环检测后还包括根据构建的虚拟mimo阵列以及检测到的目标信号进行角度测量,根据角度测量结果与对应子空域的指向角度范围的对应关系,确认检测到的目标信号是否为真实目标。
19、进一步的,所述根据角度测量结果与对应子空域的指向角度范围的对应关系,确认检测到的目标信号是否为真实目标包括:如果目标信号角度测量结果在对应子空域的指向角度范围内,则判定目标信号为真实目标;如果目标信号角度测量结果不在对应子空域的指向角度范围内,则判定目标信号为虚假目标。
20、一种基于ddma波形调制的mimo雷达目标检测装置,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
21、与现有技术相比,本发明的优点在于:
22、1、本发明通过在需要搜索的空域区间范围内,将空域范围划分为多个子空域范围,依次对每个子空域范围每个距离单元对应的所有多普勒单元进行距离多普勒数据矩阵的循环假设检验,以预先对所有目标信号分配不同的假设的发射天线顺序,然后对应构建虚拟mimo阵列的目标信号向量,当循环假设条件成立时,回波信号会叠加虚拟mimo阵列dbf指向增益,当目标信号较弱时,由于叠加的虚拟阵列dbf增益提高了弱回波信号目标的信噪比(snr),从而可以有效从多普勒域中找到弱回波目标信号的位置和发射天线顺序,解决传统mimo雷达系统中ddma模式下对于较弱的回波信号无法在距离-多普勒数据矩阵中检测出目标信号的问题,大大提高mimo雷达ddma模式下的弱目标检测性能,降低漏检概率。
23、2、本发明能够在硬件和现有ddma波形调制方法一致的基础上,提升mimo雷达系统对弱回波信号目标的检测能力,在相同目标探测距离情况下,可以降低最小rcs检测下限,在相同目标rcs情况下,可以提高目标最远探测距离,从而确保整个雷达系统的检测性能。
- 还没有人留言评论。精彩留言会获得点赞!