一种基于最大最小化准则的扫描雷达在线超分辨成像方法
本发明属于雷达探测与成像,具体涉及一种基于最大最小化准则的扫描雷达在线超分辨成像方法。
背景技术:
1、雷达前视成像在自主着陆、自主导航等领域具有重要应用。然而,现有的单静态sar由于多普勒对称性模糊而存在前视成像盲区。而实孔径雷达虽然可以实现前视成像,但天线孔径限制了其方位分辨率。因此,在过去的几十年里,许多研究者致力于通过信号处理的方法来提高方位分辨率。
2、近年来,针对这一问题提出了一些稀疏正则化方法,该类方法通常通过引入目标先验信息,构造稀疏正则化目标函数并求解以提高扫描雷达方位分辨率。文献“jianchao yang,john wright,thomas s huang,and yi ma,“image super-resolution via sparserepresentation,”ieee transactions on image processing,vol.19,no.11,pp.2861-2873,2010.”提出了一种基于l1范数的稀疏正则化方法,该方法可以有效提高雷达前视分辨率,然而,l1范数是不可微的,在实际处理中难以直接获取解析解;文献“qiping zhang,yin zhang,yongchao zhang,yulin huang,wenchao li,and jianyu yang,majorize-minimization(mm)based super-resolution method for radar forward-lookingimaging,in igarss2020-2020ieee international geoscience and remote sensingsymposium.ieee,2020,pp.3188-3191.”提出了一种将复杂的l1范数近似为更简单的l2范数的mm方法,该方法有效解决了l1范数的不可微问题。然而,mm算法也有其局限性,它通常需要数百次迭代才能达到收敛,这导致在实际应用中速度较慢。同时,由于mm迭代公式中求逆项的条件数很大,导致逆矩阵有较大的摄动,这进一步导致了它产生放大噪声的倾向。除此之外,mm算法只能采用批处理方式处理,无法在线实时更新图像。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于最大最小化准则的扫描雷达在线超分辨成像方法,以解决现有批处理mm方法的实时性问题。
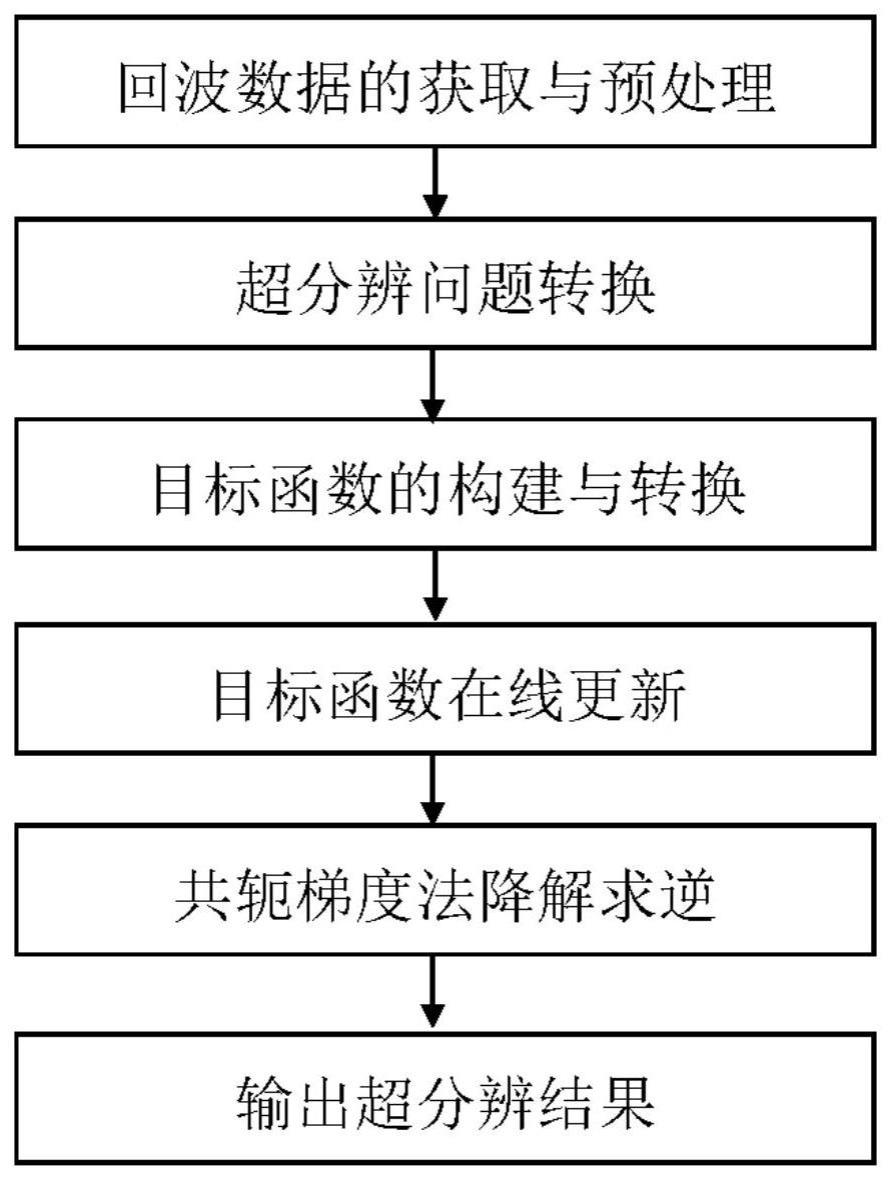
2、本发明采用的技术方案为:一种基于最大最小化准则的扫描雷达在线超分辨成像方法,具体步骤如下:
3、步骤一、方位回波卷积模型建立;
4、获取回波数据,并进行预处理,设机载雷达平台以恒定速度v沿着y轴方向匀速飞行,雷达天线以角速度ω扫描斜前视区域。平台的飞行高度为h0,平台和目标p的初始斜距为r0。在t时刻,平台与目标的距离历史r(t)表示为:
5、
6、其中,θ和β分别表示方位角和俯仰角。
7、雷达发射线性调频信号,获取目标原始回波,获得的原始回波经过距离维脉冲压缩和距离走动校正,回波信号表示为:
8、
9、其中,τ和t分别表示距离和方位时间变量,σ(x,y)和h(·)分别表示目标后向散射系数和天线方向图响应函数,sinc(·)表示脉冲压缩响应函数,φ表示感兴趣的观测区域,b表示带宽,λ表示波长,ω表示波束扫描速度,c表示电磁波传播速度,r0表示雷达平台与目标的初始斜距,r(t)表示雷达平台与目标的距离历史。
10、步骤二、超分辨问题转换,即方位回波卷积模型进行离散化处理;
11、由步骤一可知,基于扫描成像的过程,方位回波信号构造为天线函数和目标散射系数的卷积,并考虑加性高斯白噪声,将方位信号离散化处理后,方位信号模型表示为:
12、y=aσ+n (3)
13、其中,y=[y1 y2 … yn]t表示接收到的回波信号矩阵,维度为n×1;σ=[σ1 σ2 …σn]t表示目标散射系数矩阵,维度为n×1;n=[n1,n2,…,nn]t满足高斯分布的噪声矩阵,维度为n×1,t表示矩阵的转置,n表示方位采样点数;a表示由天线方向图采样构成的天线测量矩阵,维度为n×n,具体表示如下:
14、
15、其中,[a-l…a0…al]表示天线方向图采样,l表示天线方向图采样点数,n表示方位采样点数,且ω表示方位成像范围,ω表示波束扫描速度,prf表示脉冲重复频率。
16、步骤三、目标函数构建与转换;
17、对于求解离散回波模型式(3)中的目标后向散射系数的问题,在稀疏正则化框架下,将卷积模型转换为一个数学上的凸优化问题:
18、
19、其中,μ表示权衡稀疏性和噪声的正则化参数。
20、步骤四、目标函数在线更新;
21、对天线测量矩阵进行行分块,则a=[a1 a2 … an]t。
22、其中,表示a的第n行行向量,故式(5)中的第一项可等效表示为:
23、
24、其中,表示维度符号,yj表示回波信号矩阵y的第j个元素,即方位向上接收到的第j个回波值。而式(5)中的第二项l1范数由最大最小化准则可等效表示为:
25、μ||σ||1=μσtwnσ (7)
26、其中,wn=diag(1/|σn|)表示对角加载矩阵,则式(5)的模型可被等效表示为:
27、
28、其中,σn表示第n个回波到来时求解出的实时目标散射系数值,表示第n+1个回波到来时的即时目标散射系数估计值。而式(8)的闭合式解可由以下公式给出:
29、
30、步骤五、共轭梯度法降解求逆;
31、令则式(9)写为:
32、anσ=bn (10)
33、由共轭梯度法可知,当an为正定矩阵时,该线性方程组求解等价于求下式函数极小值的问题:
34、
35、其中,表示定义的代价函数,rn表示解集为实数集,σ*表示方程的解。
36、对于上述极小化问题,采用迭代求解,其迭代计算流程如下:
37、首先,初始化方程解σ*的迭代值,选取σ0∈rn,令r0=bn-anσ0,循环迭代步骤如下:
38、
39、其中,σ0表示式(11)中的自变量的初始迭代值,k表示迭代次数,h表示矩阵的共轭转置;ε表示一个无穷小数。
40、当||σk+1-σk||<ε时,结束循环迭代,方程解σ=σk。
41、基于上述推导,在每个回波到来时可进行基于共轭梯度法降解求逆的在线更新,当n=1时,设置初始化为:
42、
43、其中,当n≥2时,令则an=μwn+qn,按以下公式递推计算:
44、
45、本发明的有益效果:本发明的方法通过建立方位回波卷积模型,进行离散化处理,完成超分辨问题转换,在正则化框架下利用最大-最小化准则构造含稀疏先验信息的可解析优化代价函数,将前视成像分辨率提升问题转化为最优化估计问题,通过对天线测量矩阵行分块处理,将矩阵运算降解为向量运算的不断积累,实现前视区域目标实时在线更新,最后使用共轭梯度法降解求逆,输出超分辨结果。本发明的方法可以在有限系统内存的情况下,通过基于最大最小化准则下的在线共轭梯度超分辨算法,实现快速成像,与现有批处理正则化方法相比,消除了虚假目标,显著降低了运算复杂度,有利于扫描雷达的快速成像。
- 还没有人留言评论。精彩留言会获得点赞!