一种鲁棒自适应因子图智能铁鞋导航系统和算法的制作方法
本发明属于智能铁鞋定位领域,尤其是一种鲁棒自适应因子图智能铁鞋导航系统系统和算法。
背景技术:
1、随着我国在铁路交通领域的蓬勃发展,铁路行业将重心放在确保列车在铁路站场拥有安全的工作环境。在整个铁路工作环境中,列车在完成进站操作后发生频率较高的列车事故之一就是列车溜逸事故。溜逸事故的定义是铁路列车在铁路轨道上停置时,站场的工作人员未能及时进行防溜逸作业操作或者未能严格遵守安全规章的流程要求来进行防溜逸作业操作,导致防溜逸作业不合格,列车受到本身重力或外力发生列车顺铁路轨道滑动甚至导致多列车溜出轨道、发生碰撞等严重安全事故。
2、防溜铁鞋是一种固定车轮的制动装置,需要将其抵靠于铁路轨道的车轮旁,防止发生列车溜逸。我国制定的《铁路技术管理规程》中有明文说明:停靠在铁路轨道上的列车,如果不进行作业,必须要采用铁鞋等防溜设备加固稳定。铁路站场的列车制动人员在获取了防溜作业的委派时,采取在铁路作业规定轨道进行防溜铁鞋放置,防止溜逸事故发生在站场铁路轨道上停置的列车上。在传统的防溜铁鞋作业过程中,大量采用人工操作的方式来对铁鞋进行放置、撤出、巡检、维护等操作,随着铁路交通市场的繁荣,列车防溜作业的工作量急剧加大,铁路站场工作人员使用人工操作放置维护铁鞋进行防溜作业需要承担的人力资源成本随之不断提高,与此同时铁鞋缺少实时的数字化、信息化管理,无法对防溜逸工作中的全部铁鞋进行全天候、精准的实时监控,如果发生人工放置铁鞋漏放、放置姿态不合规等疏漏,就很有可能造成列车发生溜逸、脱轨、带鞋开车等安全事故,严重威胁了铁路站场的安全工作环境。因此可知,传统的防溜铁鞋已经无法担任列车防溜作业的任务。
3、对传统铁鞋进行智能化改造,已经成为现代化铁路站点的迫切需要,其中最关键的就是对铁鞋的位置进行精准的实时监控。只有做到实时的铁鞋导航定位,才能保证防溜逸系统的正常运行。在智能铁鞋的导航定位系统中,仅使用单独的导航系统会受限于该系统自身的应用能力,若是组合多种类型不同的导航系统,不同的系统可以互相填充各自的弱势领域,采用滤波的方式把不同的导航系统的输出数据信息融合,来达到提升整个智能铁鞋导航定位系统的精度的目的。
4、前期,我们提出“一种基于因子图消元优化的多传感器融合智能铁鞋定位系统和算法”(申请号202310082400.0)提供了多个不同传感器的信息融合算法,实现了导航系统的热插拔性。但是,单独的信息融合算法,并不能抵抗由传感器受到干扰产生的误差。
5、主流因子图系统导航算法在对量测噪声的设定中往往采用固定设定,即假定量测噪声不变,同时各个传感器的权重分配固定。但在铁路站场工作环境下,障碍物遮挡信号、附近车厢干扰信号源以及传感装置自身改变等多种不可预见状况皆可导致测量噪声偏离初始状态,在某些干扰严重时甚至大幅降低导航精度。因此,初始时刻设定的参数已经不再适合当前时刻的导航系统。目前基于因子图的多传感器导航系统未考虑未知情况下传感器状态变化以及量测信息变化的系统鲁棒性。
技术实现思路
1、本发明针对背景技术中存在的问题,提出了一种鲁棒自适应因子图智能铁鞋导航系统和算法。
2、技术方案:
3、本发明首先公开了一种鲁棒自适应因子图智能铁鞋导航系统,该系统包括定位卫星、智能铁鞋及监控上位机:
4、所述的智能铁鞋包括智能铁鞋监测器mcu、惯性导航器imu、gps接收机、多普勒导航系统dns、无线电高度表ra、自适应滤波模块及铁鞋本体;
5、所述的定位卫星与gps接收器建立通信,将铁鞋本体定位信号发送至gps接收器;
6、所述的惯性导航器imu包括陀螺仪传感器和加速度传感器,采集铁鞋本体角加速度和加速度数据,采集加速度和角加速度,并进行捷联数据解算,得到更新的位置信息,将信息发送至智能铁鞋监测器;
7、所述的gps接收机由gps接收机天线单元、gps接收机主机单元和电源三部组成;接收定位卫星发送的铁鞋本体定位信号,以计算得到自身定位信息,将信息发送至智能铁鞋;
8、所述的多普勒导航系统dns由多普勒雷达和陀螺组成;通过多普勒导航雷达采集载体的多普勒频移数据来解算载体的速度,通过陀螺采集载体的姿态信息;
9、所述的无线电高度表ra向地面发射无线电信号,接收从地面反射而来的无线电波,根据反射电波信息解算载体的高度;
10、所述的自适应滤波模块包括可观测度分析模块和可信度计算模块,通过可信度分析自适应调整各个导航因子的权重,从而显著提高系统的稳定性。
11、所述的智能铁鞋监测器mcu汇集来自惯性导航器imu、gps接收器、多普勒导航系统dns和无线电高度表ra的信息,基于鲁棒自适应因子图的智能铁鞋导航系统算法,构建智能铁鞋系统的因子图模型,将模型数据导入基于因子图消元优化的信息融合算法中,计算获得最终铁鞋本体位置数据信息,并将定位数据发送至监控上位机;
12、所述的监控上位机接收来自智能铁鞋的定位信息。
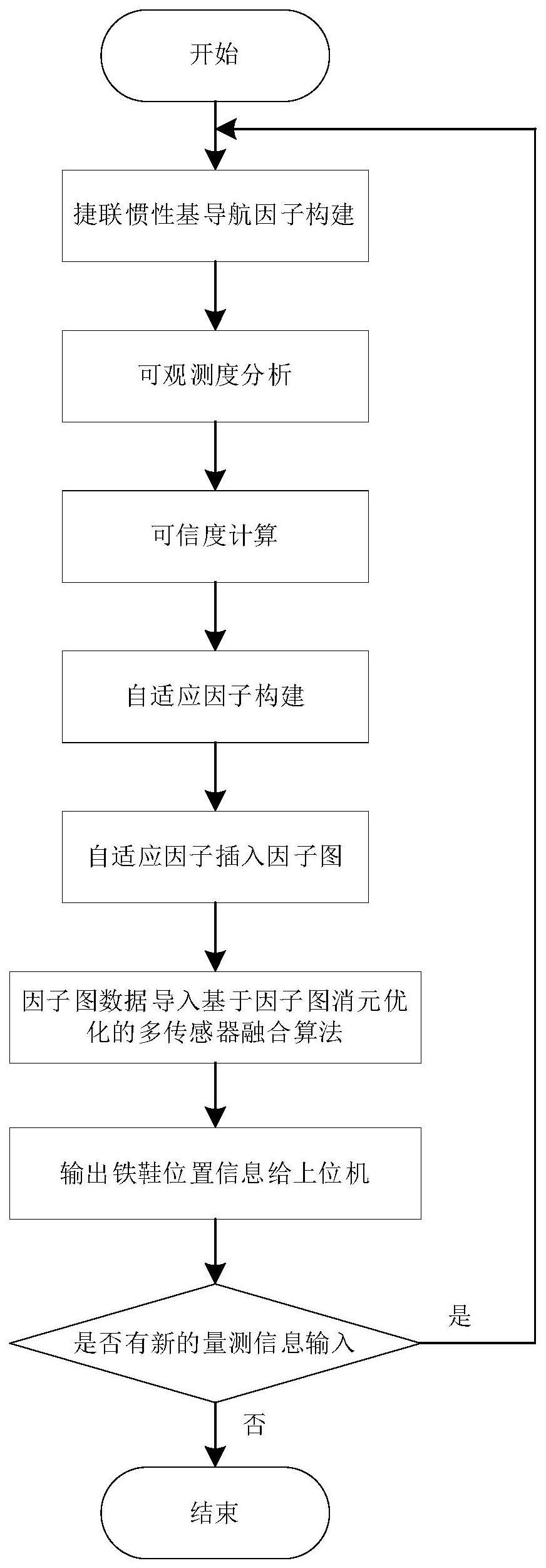
13、本发明还公开了一种鲁棒自适应因子图智能铁鞋导航系统算法,基于所述的系统,所述的鲁棒自适应因子图智能铁鞋导航系统算法步骤分为:捷联惯性基导航因子构建、可观测度分析、可信度计算、自适应因子构建,具体流程如下:
14、步骤1:捷联惯性基导航因子构建
15、系统以惯性导航器imu为核心,gps、多普勒导航系统dns和无线电高度表ra为辅助传感器,通过自适应卡尔曼滤波算法,将各个辅助传感器与核心传感器构成导航因子,对各个辅助传感器的量测噪声方差矩阵进行实时的自适应更新;
16、步骤2:可观测度分析
17、为了确定导航系统的量测信息质量,引入了一种基于可观测性分析的方法,对系统量化分析,用于数值评估外部辅助传感器的性能和每个时间时刻的导航误差状态的可估计性;
18、步骤3:可信度计算
19、利用上节所述的可观测度分析方法,实现对智能防溜铁鞋全源导航系统中导航因子信号可信度的计算;
20、步骤4:自适应因子构建
21、根据导航系统的可信度原理,在导航因子中引入可信度,设计了自适应导航因子,重新加入导航系统中;将模型数据导入基于因子图消元优化的信息融合算法中,计算获得最终铁鞋本体位置数据信息。
22、具体的,将各个辅助传感器与核心传感器构成导航因子,其步骤如下:
23、1-1)设组合导航系统的数学形式有:
24、
25、式中,xk表示系统在tk时刻的状态变量,zk表示tk时刻的量测信息,φk,k-1表示tk-1到tk时刻的转移矩阵,hk表示量测函数矩阵,γk-1表示系统噪声驱动矩阵,vk代表量测噪声,wk-1时系统激励噪声;其中系统噪声和量测噪声互不影响,且二者均值为零;令qk表示系统噪声方差矩阵,且该矩阵是非负定的矩阵,令rk表示量测噪声方差矩阵,且该矩阵是正定矩阵;
26、1-2)根据步骤1-1所设系统的数学形式进行一步状态预测有:
27、
28、其中,表示tk-1到tk时刻的一步状态预测,表示tk-1时刻的状态估计,tk时刻的状态估计
29、
30、其中,滤波增益kk:
31、
32、或一步预测均方误差:
33、
34、其中,pk/k-1表示表示tk-1到tk时刻的一步预测均方误差,pk-1表示tk-1时刻的估计均方误差,表示tk时刻预测的系统噪声方差阵,tk时刻的估计均方误差:
35、
36、或
37、pk=(i-kkhk)pk/k-1 (1.7)
38、设
39、
40、
41、
42、
43、
44、
45、式中,εk表示残差,rk表示量测噪声方差矩阵,rk表示量测噪声估计,qk表示系统噪声估计,加权系数dk=(1-b)/(1-bk),且遗忘因子b有0≤b≤1,通过该滤波算法可以在系统噪声和量测噪声发生动态变化的时候,实时地估计出最新时刻的系统噪声和量测噪声的方差矩阵;
46、1-3)根据步骤1-2所得的系统状态方程设定遗忘因子b的大小在0.95~0.99之间,在工作时根据外界环境和任务目标合理设置,希望更快忽略历史信息影响就设定更大的遗忘因子,得到捷联惯性基导航因子;
47、1-4)将得到的捷联惯性基导航因子进行可观测度分析,进入步骤2。
48、具体的,对系统进行可观测度分析,其步骤如下:
49、2-1)对系统的量化分析采用标量形式。根据组合导航系统的数学模型,有:
50、
51、其中有:
52、
53、
54、
55、其中,ok、表示存储标量的矩阵;
56、2-2)对步骤1-1中的矩阵求其伪逆矩阵,用符号“+”表示;通过此伪逆矩阵推导出导航系统的状态变量与量测信息的关联式:
57、
58、针对组合系统中每个状态变量进行可观测度分析,设向量向量这两个向量中的分量的标量表达有:
59、
60、
61、式中,标量和标量分别表示向量yk和向量uk的第i个分量,为中处于i行的时变系数,j=1,…,n;
62、2-3)定义量测噪声的方差为:
63、
64、式中,表示直接观测噪声的初始方差;
65、2-4)利用步骤2-1~步骤2-3得到的数据,计算系统的可观测度dki:
66、
67、式中,分别表示状态标量和量测标量的方差;
68、为了保证各个状态向量可观测度在维度上的一致,可以将可观测度表达为:
69、
70、式中,以及
71、具体的,利用可观测度计算导航因子的可信度,其步骤如下:
72、3-1)令表示智能铁鞋组合导航系统中的第ξ个导航因子的中的第i个变量的在系统的因子图模型中的权重,因此的计算方程为:
73、
74、式中,表示智能铁鞋组合导航系统中的第ξ个导航因子的中的第i个变量在k时刻的可观测度;
75、3-2)根据步骤3-1得到设置分段函数的可信度计算方法,根据实际工作环境和工作需求设定可信度阈值,动态改进因子图中导航因子的模型,降低量测信号可信度的导航因子对系统的影响;
76、导航因子插入智能防溜铁鞋全源导航系统的因子图模型时给定的权值比重,即可信度的计算方程有:
77、
78、式中,ψ+和ψ-分别表示可信度阈值的上下界,一般取0.2<ψ-≤0.4,0.6<ψ+≤1。
79、具体的,步骤4中设计自适应导航因子,重新加入导航系统中,其步骤如下:
80、4-1)设计自适应导航因子:
81、
82、式中,φ(ψk)是可信度函数表示的标量,0≤φ(ψk)≤1。
83、4-2)将步骤4-1得到的自适应因子插入因子图中,把得到的因子图模型数据导入基于因子图消元优化的信息融合算法中,计算获得最终铁鞋本体位置数据信息。
84、本发明的有益效果
85、本技术提出了一种鲁棒自适应因子图智能铁鞋导航系统和算法,在消元优化因子图的基础上,加入了对各个传感器信息的自适应滤波,从而得到其导航因子及计算其可观测度与可信度,通过可信度分析自适应调整各个导航因子的权重,从而显著提高系统的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!