基于三维扫描技术的导管贴合度、同轴度和偏斜量检测方法与流程
本发明属于飞机导管装配检测,特别涉及一种装配过程中导管与管路附件之间的贴合度、同轴度、偏斜量检测方法,具体为基于三维扫描技术的导管贴合度、同轴度和偏斜量检测方法。
背景技术:
1、飞机扩口式导管装配过程中,为了实现良好的密封,需要在装配过程中检测贴合度、同轴度、偏斜量,此三个指标会显著影响扩口式导管的环形密封面尺寸,从而影响导管的密封程度。导管贴合度指标如图1所示,导管同轴度指标如图2所示,导管偏斜量指标如图3所示。
2、目前航空行业内,对于导管贴合度的检测,采用人工手段使用金属铁塞尺塞入导管与液压附件的对合处进行测量,人为因素影响较大,操作繁杂,同时金属铁塞尺在测量过程中存在刮伤扩口式导管锥面的可能性,存在一定的安全隐患。而对于导管同轴度和偏斜量的检测,目前只停留在定性检测的层面,无法按照相应的技术标准进行定量检测。
3、因此,如何进行飞机液压系统导管贴合度、同轴度和偏斜量的快速定量检测,进而提升飞机液压系统导管的密封性及安全性,是导管装配检测领域内亟需解决的技术问题。
技术实现思路
1、为提升飞机导管的装配质量,实现导管贴合度、同轴度和偏斜量的定量检测,同时提升检测效率和检测精度,本发明提供一种基于三维扫描技术的导管贴合度、同轴度和偏斜量检测方法。
2、本发明的技术方案如下:
3、基于三维扫描技术的导管贴合度、同轴度和偏斜量检测方法,具体步骤如下:
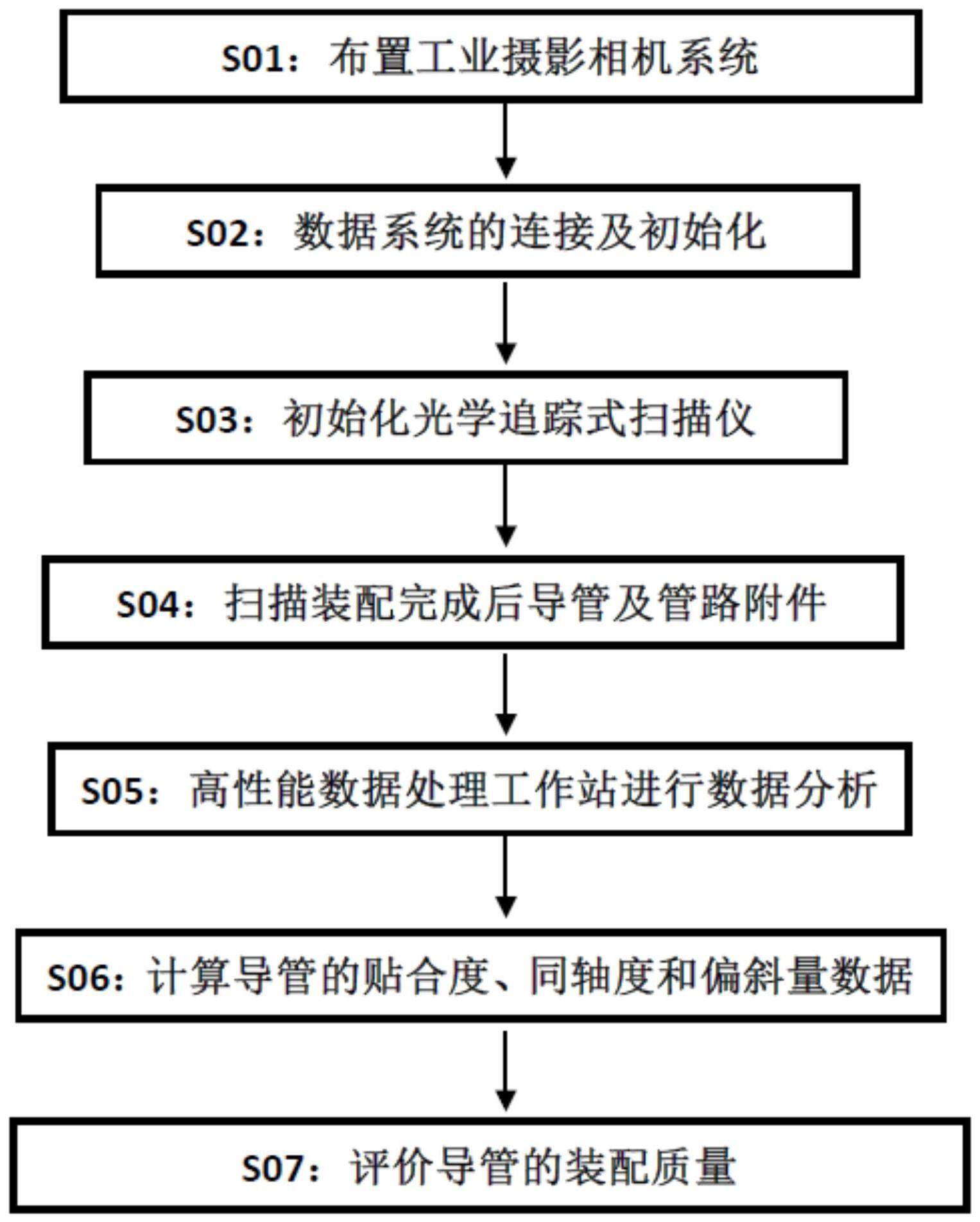
4、s01:布置工业摄影相机系统
5、根据导管在飞机结构上的装配位置,按照实际情况布置工业摄影相机;布置时工业摄影相机完全覆盖导管的装配区域,并保证扫描过程中接收光学追踪式扫描仪数据的路线上没有多余障碍物的遮挡;保证工业摄影相机可以快速完整准确地接收扫描到的图像。
6、s02:数据系统的连接及初始化
7、将工业摄影相机的数据传输线、光学追踪式扫描仪数据线与高性能数据处理工作站上的对应接口连接;启动工业摄影相机和光学追踪式扫描仪,完成自动校准工作。
8、s03:初始化光学追踪式扫描仪
9、利用光学追踪式扫描仪对扫描区域进行初始扫描,高性能数据处理工作站依据接收到得初始数据,建立系统相对坐标系(x,y,z)。
10、s04:扫描装配完成后导管及管路附件
11、利用光学追踪式扫描仪对需要检测的导管装配区域进行扫描,对导管及管路附件进行精细化扫描。
12、s05:高性能数据处理工作站进行数据分析
13、依据扫描到的导管及管路附件的数据信息,计算导管锥面的曲面方程f1(x,y,z)=0及轴线方程l1,管路附件锥面的曲面方程f2(x,y,z)=0及轴线方程l2。
14、s06:计算导管的贴合度、同轴度和偏斜量数据
15、s06.1:计算每个状态下的导管与管路附件之间的贴合度(ε1,ε2,ε3,……εi),并以此为数据,计算出最终的贴合度数据δ1。
16、s06.2:高性能数据处理工作站计算出导管轴线方向向量与管路附件轴线的方向向量
17、s06.3:高性能数据处理工作站若计算导管轴线方向向量与管路附件轴线方向向量为共线向量时,导管轴线l1和参考垂直面y=0之间的交点s,以及管路附件轴线l2和参考垂直面y=0之间的交点l;并以此为数据,计算出最终的同轴度数据δ2。
18、s06.4:高性能数据处理工作站若计算导管轴线方向向量与管路附件轴线的方向向量为非共线向量时,以方向向量和方向向量为基础数据,计算出最终的偏斜量数据δ3。
19、s07:评价导管的装配质量
20、完成s06步骤后,高性能数据处理工作站依据计算得到的导管贴合度δ1、同轴度δ2和偏斜量δ3,按照相应的技术标准评价此次导管的装配质量,并给出相应的技术报告。
21、其中,高性能数据处理工作站根据如下方法计算导管贴合度、同轴度和偏斜量:
22、(1)建立光学三维扫描测量系统相对坐标系(x,y,z);
23、(2)计算导管锥面的曲面方程及轴线方程:
24、锥面:f1(x,y,z)=0
25、轴线:
26、为导管轴线的方向向量;(x1,y1,z1)为l1轴线上的参考点a的坐标;
27、(3)计算管路附件锥面的曲面方程及轴线方程:
28、锥面:f2(x,y,z)=0
29、轴线:
30、为管路附件轴线的方向向量;(x2,y2,z2)为l2轴线上的参考点b的坐标;
31、(4)计算导管及管路附件之间的贴合度δ1:
32、(4.1)计算以绕导管轴线每次偏转0.1°(范围为0°~180°)旋转参考垂直面y=0,得到平面:
33、pn(x,y,z)=0
34、(4.2)计算与平面pn(x,y,z)=0垂直的平面:
35、qn(x,y,z)=0
36、(4.3)计算导管锥面的曲面与平面pn(x,y,z)=0之间的交线和
37、f1(f1(x,y,z)=0,pn(x,y,z)=0)
38、
39、
40、其中,f1为计算导管锥面的曲面与平面pn(x,y,z)=0交线的函数;为直线上的参考点,为其方向向量;为直线上的参考点,为其方向向量;
41、(4.4)计算管路附件锥面的曲面与平面pn(x,y,z)=0之间的交线和
42、g1(f2(x,y,z)=0,pn(x,y,z)=0)
43、
44、
45、其中,g1为计算管路附件锥面的曲面与平面pn(x,y,z)=0交线的函数;为直线上的参考点,为其方向向量;为直线上的参考点,为其方向向量;
46、(4.5)计算交线和与平面qn(x,y,z)=0之间的交点和
47、
48、
49、其中,f2为计算直线和与平面qn(x,y,z)=0之间的交点函数;ki和ki+1代表直线和对应的交点;
50、(4.6)计算交线和与平面qn(x,y,z)=0之间的交点和
51、
52、
53、其中g2为计算交线和与平面qn(x,y,z)=0之间的交点函数;pi和pi+1代表交线和对应的交点;
54、(4.7)计算每偏转一次参考垂直面y=0后的导管及管路附件之间的贴合度εi:
55、
56、
57、其中τ为计算系数,τ=1/sin(θ),θ为扩口式导管锥面度数;
58、
59、(4.8)计算最终的导管及管路附件之间的贴合度δ1:
60、δ1=max(ε1,ε2,ε3,……εi)
61、(5)判断导管轴线方向向量与管路附件轴线的方向向量是否为共线向量:
62、
63、其中α为系统参数,用于判别与是否为共线向量;当α≠0时,与为共线向量;当α=0时,与为非共线向量;
64、(6)当导管轴线方向向量与管路附件轴线的方向向量为共线向量时,计算导管及管路附件之间的同轴度δ2:
65、(6.1)计算导管轴线l1和参考垂直面y=0之间的交点s(xs,ys,zs)。
66、
67、其中f3为计算导管轴线l1和参考垂直面y=0之间交点的函数;
68、(6.2)计算管路附件轴线l2和参考垂直面y=0之间的交点l(xl,yl,zl)。
69、
70、其中g3为计算管路附件轴线l2和参考垂直面y=0之间交点的函数;
71、(6.3)计算导管及管路附件之间的同轴度δ2:
72、
73、(7)当导管轴线方向向量与管路附件轴线的方向向量为非共线向量时,计算导管及管路附件之间的偏斜量δ3:
74、
75、本发明的有益效果:
76、(1)本发明采用独特的设计思路,制定了一套基于三维扫描技术的导管贴合度、同轴度和偏斜量检测的运行算法,可实现对导管装配质量的自动评价。
77、(2)本发明中涉及到的光学三维扫描测量系统,可以实现对导管及管路附件的高精度快速扫描,避免了繁杂的人工操作,以及人工检测时可能对导管造成的损伤。
78、(3)本发明提供的一种于三维扫描技术的导管贴合度、同轴度和偏斜量检测方法,可实现飞机导管装配时贴合度δ1、同轴度δ2和偏斜量δ3的定量检测,并提升了检测精度和检测效率,保证了飞机导管的高质量装配。
- 还没有人留言评论。精彩留言会获得点赞!