一种小型机场道面异物高光谱检测装置和方法
本发明涉及机场道面巡检设备,尤其涉及一种小型机场道面异物高光谱检测装置和方法。
背景技术:
1、机场跑道、滑行道、停机坪等道面异物(foreign object debris,fod)已成为造成飞机损伤和威胁飞行安全的重大隐患,由此引发的航班延误、中断起飞、关闭跑道等间接损失更大。目前进行繁冗的人工巡检需要长时间关闭跑道,制约航班通行效率,难以满足机场快速增长的起降频次的需要。以雷达、光学相机、多源传感器融合为代表的自动检测技术,或难以区分道面异物种类,或难以区分图像特征相似的目标和背景,或维护成本过高,在精确度、可靠性、经济性方面难以满足更高要求。针对机场道面异物的自主感知和预警应用需求,亟需发展新型的机场道面异物检测技术和设备。
2、现阶段,国内外大部分机场均主要靠巡检人员每天四次步行检查完成,以毫米波雷达、光学相机等设备为代表的自动巡查仅约占所有检测的10%。相比人工检测方式,自动巡查方式封闭跑道的时间更短,对于民用航空机场来说,在保障航空运输安全的同时,降低机场公共资源的损耗,提高人力资源的利用率,还可以提高机场的起降容量和运行效率。目前,国内外研制的fod检测技术和系统主要有以下几种:
3、1.基于毫米波雷达(mw radar)的fod检测技术
4、基于毫米波雷达的fod检测技术是一种常用的跑道异物检测技术。毫米波雷达能够发射高频电磁波(ghz),当其遇到道面上的异物时,会反射回雷达接收器。通过分析反射信号的特性和时间延迟等信息,可以对跑道上的异物进行探测识别。毫米波雷达具有体积小、质量轻、空间分辨率高、抗电磁干扰强等特点,非常适用于机场跑道fod探测应用。但该技术无法对不同异物种类进行分类,且硬件设备成本较高。另外,随着毫米波设备在民用领域的大规模应用,同邻频兼容性成为fod探测系统应用不可规避的问题。目前国内外产品化的fod探测雷达均采用毫米波频段(30~300ghz),工作频率主要包括76-77ghz、78-81ghz、92-95ghz三个频段,76-81ghz频段共存设备主要有车载雷达和周界安防雷达,仅92-95ghz频段fod雷达与现有共存设备兼容性问题不突出。布置方式常为塔架式、分布式(边灯式)和移动式(车载式、机器人式)探测系统,主要应用于国内外各大型机场。
5、2.基于光学相机(optical camera)的fod检测技术
6、基于光学相机的fod检测技术利用计算机视觉技术实现自动识别,并定位跑道上的异物。相比毫米波雷达,它能提供更详细真实的目标图像信息,并且能非常方便地与其他传感器进行融合,也可以结合深度学习、神经网络等技术来进一步提升检测精度,但在区分图像特征相似的目标和背景时容易出现漏检的问题,且在天气变化和低视程环境下可能表现出较大的误差和不稳定性,如新加坡利用可见光摄像机开发的iferret系统(塔架式)。
7、3.基于多源传感器融合的fod检测技术
8、综合检测系统主要由毫米波雷达、可见光摄像机、红外热成像摄像机组成,采用多源数据融合的目标识别分类处理算法,可实现对机场跑道异物的全天时、全天候、全自动检测。这种技术能够结合不同传感器的优势实现更高效、更准确的检测,但需要解决传感器数据集成、校准、处理等问题,且综合成本较高。如英国开发的tarsier radar系统(塔架式)、以色列开发的fodetect系统(边灯式)和美国开发的fodfinder系统(车载式)。
9、综上所述,如何提出一种小型机场道面异物高光谱检测装置和方法,以实现高效低成本的识别机场道面异物,成为本领域技术人员亟待解决的技术难题。
技术实现思路
1、本发明的目的是提供一种小型机场道面异物高光谱检测装置和方法,解决现有技术在机场道面异物检测方面存在效率低、漏检率高、成本高等问题。
2、为解决上述技术问题,本发明采用如下技术方案:
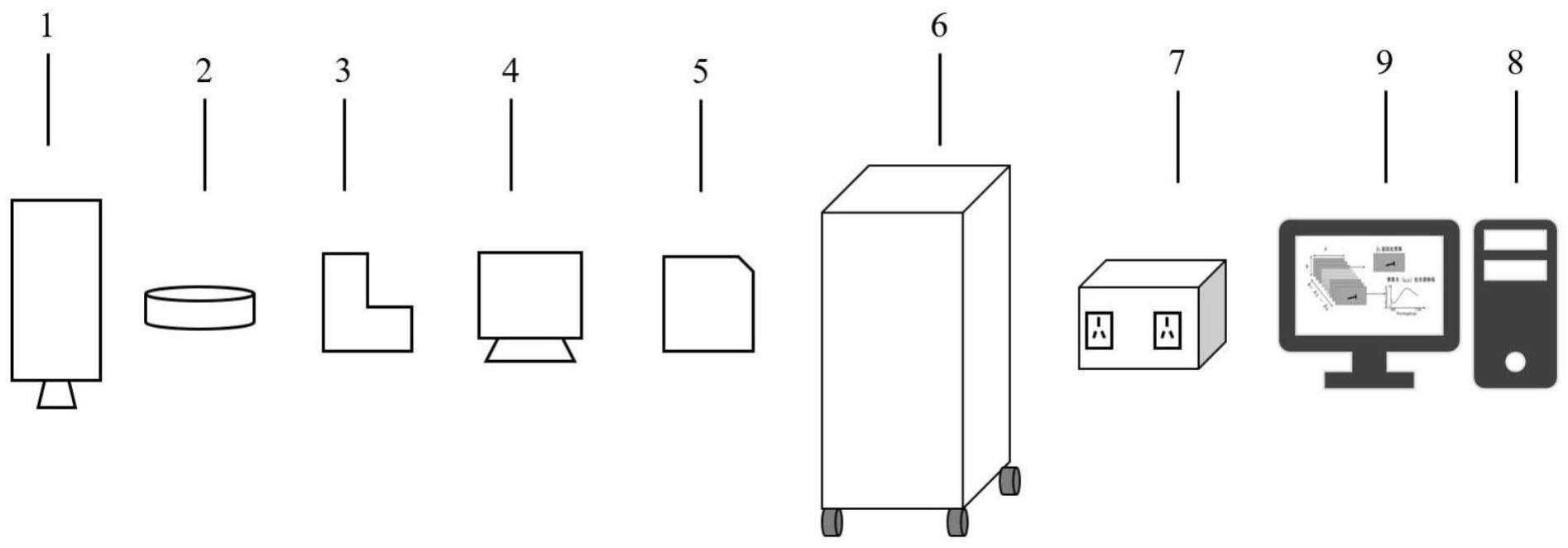
3、本发明提供一种小型机场道面异物高光谱检测装置,包括:高光谱成像仪、成像仪支撑部件、道路巡检小车、数据处理器和显示设备;
4、所述高光谱成像仪安装在所述成像仪支撑部件上,所述成像仪支撑部件安装在所述道路巡检小车,所述高光谱成像仪与所述数据处理器之间通信连接,所述数据处理器与所述显示设备之间通信线电连接。
5、优选的,所述成像仪支撑部件包括电动旋转台和三维云台,所述高光谱成像仪通过l型转接板连接在所述电动旋转台上,所述电动旋转台通过平板型转接板连接在所述三维云台上,所述三维云台安装在所述道路巡检小车的支撑平台上。
6、优选的,所述电动旋转台为高精度电动旋转台,所述电动旋转台的转角精度为0.005°,所述电动旋转台的旋转扫描速度为0.01°/s-25°/s,所述电动旋转台的旋转角度大于300°。
7、优选的,所述三维云台为轻载云台,所述三维云台的最大承载为7kg,所述三维云台的重复定位精度不大于±0.1°,所述三维云台的俯仰旋转角度在+90°于-60°之间。
8、优选的,所述道路巡检小车中部或底部还安装有移动电源,所述移动电源为所述高光谱成像仪、电动旋转台和三维云台供电。
9、优选的,所述l型转接板的底板上开设有5个螺纹孔,所述l型转接板的侧板上开设有4个螺纹孔,所述螺纹孔的孔径尺寸为m4,所述l型转接板的底板连接所述电动旋转台,所述l型转接板的侧板连接所述高光谱成像仪。
10、优选的,所述平板型转接板为梯形平板,所述平板型转接板上开设有12个螺纹孔,所述螺纹孔的孔径尺寸为m6。
11、优选的,所述道路巡检小车的的支撑平台的高度可调。
12、本发明还提供一种小型机场道面异物高光谱检测方法,包括以下步骤:
13、s1:参数设置,利用所述数据处理器设置三维云台的俯角参数为30°,电动旋转台的起点角度参数为30°,旋转扫描角距离参数为90°,转速参数为0.5°/s,高光谱成像仪的曝光时间参数为10ms,物距参数为1.5m;
14、s2:路径设置,根据小型机场跑道、滑行道与停机坪的道路情况规划设置所述道路巡检小车的巡检路径;
15、s3:异物识别算法加载,将基于光谱特征的波形相似度匹配算法,和基于图像特征的卷积神经网络算法加载入所述数据处理器中;
16、s4:异物识别算法训练,利用飞机部件、玻璃制品、碎石块、木棍、金属零件、塑料纸片和行李物品分别训练所述数据处理器中的卷积神经网络算法和波形相似度匹配算法;
17、s5:数据采集,所述道路巡检小车按照规划设置的巡检路径运动,带动所述高光谱成像仪采集机场道面图像数据信息,所述机场道面图像数据信息处理后形成机场道面光谱数据信息;
18、s6:异物识别,利用训练好的卷积神经网络算法和波形相似度匹配算法分别处理高光谱成像仪传来的机场道面图像数据信息和与机场道面图像数据信息相对应的光谱数据信息,根据卷积神经网络算法和波形相似度匹配算法的分析处理结果对比完成对道路异物进行识别;
19、s7:结果显示,利用所述显示设备实时显示卷积神经网络算法和波形相似度匹配算法的分析处理结果。
20、其中,s6中包括以下分步骤:
21、s61:利用训练好的卷积神经网络算法处理高光谱成像仪传来的机场道面图像数据信息,得到异物识别结果a,所述异物识别结果a包括无异物a1,有异物且异物种类为a2;
22、s62:利用训练好的波形相似度匹配算法处理高光谱成像仪传来的机场道面光谱数据信息,得到异物识别结果b,所述异物识别结果b包括无异物b1,有异物且异物种类为b2;
23、s63:对步骤s61与步骤s62的输出结果进行判断:
24、步骤s61的输出结果为无异物a1且步骤s62的输出结果为无异物b1时,输出无异物a1;
25、步骤s61的输出结果为无异物a1且步骤s62的输出结果为有异物且异物种类为b2,输出有异物且异物种类为b2;
26、步骤s61的输出结果为有异物且异物种类为a2且步骤s62的输出结果为无异物b1时,输出异物且异物种类为a2;
27、步骤s61的输出结果为有异物且异物种类为a2且步骤s62的输出结果为有异物且异物种类为b2时,输出有异物且异物种类为b2。
28、与现有技术相比,本发明的有益技术效果:
29、本发明一种小型机场道面异物高光谱检测装置,包括高光谱成像仪、成像仪支撑部件、道路巡检小车、数据处理器和显示设备;
30、所述高光谱成像仪安装在所述成像仪支撑部件上,所述成像仪支撑部件安装在所述道路巡检小车上,所述高光谱成像仪与所述数据处理器之间通信连接,所述数据处理器与所述显示设备之间通信线电连接。
31、1)相比现有的基于毫米波雷达(mw radar)的fod检测技术,本发明在雷达可检测到异物存在但无法区分异物种类时,借助目标丰富的图像和光谱信息,可实现道面异物的识别分类;
32、2)相比现有的基于光学相机(optical camera)的fod检测技术,本发明在图像特征无法区分待测目标和背景时,利用每种物质特有的“指纹”光谱特征,可实现道面异物图像的逐像元精细识别分类;
33、3)相比现有的基于多源传感器融合的fod检测技术,本发明仅利用高光谱成像仪可同时获取目标的图像和光谱数据,避免多源数据融合处理过程,检测周期短,系统结构简洁,硬件成本较低,抗电磁干扰能力强。
- 还没有人留言评论。精彩留言会获得点赞!