GIS断路器弹簧操动机构机械性能预警方法及系统与流程
本发明涉及gis断路器操动机构机械性能预警,尤其是一种基于振动信号的gis断路器弹簧操动机构机械性能预警方法、系统、设备及介质。
背景技术:
1、在所有投运的电力设备中,气体绝缘组合电器gis以其结构紧凑、占地面积小、易于维护、检修周期长等优势广泛应用于电力系统。gis断路器操动机构是gis的核心设备之一,对gis的运行可靠性非常重要,但在频繁切断和关合线路的过程中,机械磨损对断路器操动机构的运行寿命影响较大。实际上,操动机构结构复杂,受到生产、运输、装配和投运等过程中的人为和环境因素的多方面作用,在实际运行中机械故障频发。在长期使用和频繁动作的过程中,操动机构常出现分合闸线圈松动、传动机构卡涩、储能弹簧疲惫、三相不同期等机械故障,进而导致断路器分闸或合闸不到位,引起发热或局部放电,随着时间积累到一定程度后,进一步导致电气故障和绝缘故障的发生,最终引发重大电力事故,造成经济财产的巨大损失,威胁运维人员的人身安全。
2、断路器动作时由操动机构提供能量,故操动机构的良好运行是实现断路器分合闸操作的重要前提。其中,弹簧操动机构凭借结构简单、体积小、操作噪音小、对环境无污染、免运行维护、可靠性高等优点成为高压断路器中应用最广泛的操动机构类型之一。但是,受制于断路器弹簧操动机构的复杂机械结构,其引发的故障类型较多,主要表现为拒动、分合不到位、误分和误合等。据统计,机械故障是断路器的主要故障,且因操动机构引发的故障占比最高,且逐年上升。因此,如何准确实现gis断路器弹簧操动机构的机械性能预警一直是关注热点。
3、振动信号作为设备机械状态信息的一种有效载体,其变化与设备运行状态的改变密切相关。作为一种瞬动式开关设备,gis断路器分合闸过程中操动机构机械元件的运动、触头的撞击等均会产生振动信号,即其分合闸动作过程中的内部事件体现在每一个瞬态波形中,因此,gis断路器分合闸过程中的多峰值振动信号承载着其内部各个机械元件的动作信息,且具有很强的相似性,故振动分析法已成为断路器机械状态监测的重要手段。但是,由于gis具有零部件高度集成且封闭的结构特点,不同组件的振动模式并不完全相同,与gis断路器分合闸过程中机械元件的运动过程相对应,其所伴生的振动信号呈现迅速上升、逐渐衰减、及多峰值混叠的特点,给准确获取振动信号中所蕴含的设备机械状态信息带来了困难。
技术实现思路
1、本发明的目的之一是提供一种基于振动信号的gis断路器弹簧操动机构机械性能预警方法,该方法通过对gis断路器分合闸过程中的振动信号进行分析处理,以实现gis断路器弹簧操动机构的机械性能预警。
2、为实现上述发明目的,本发明提供采用如下的技术方案:一种断路器操动机构机械性能预警方法,其包括:
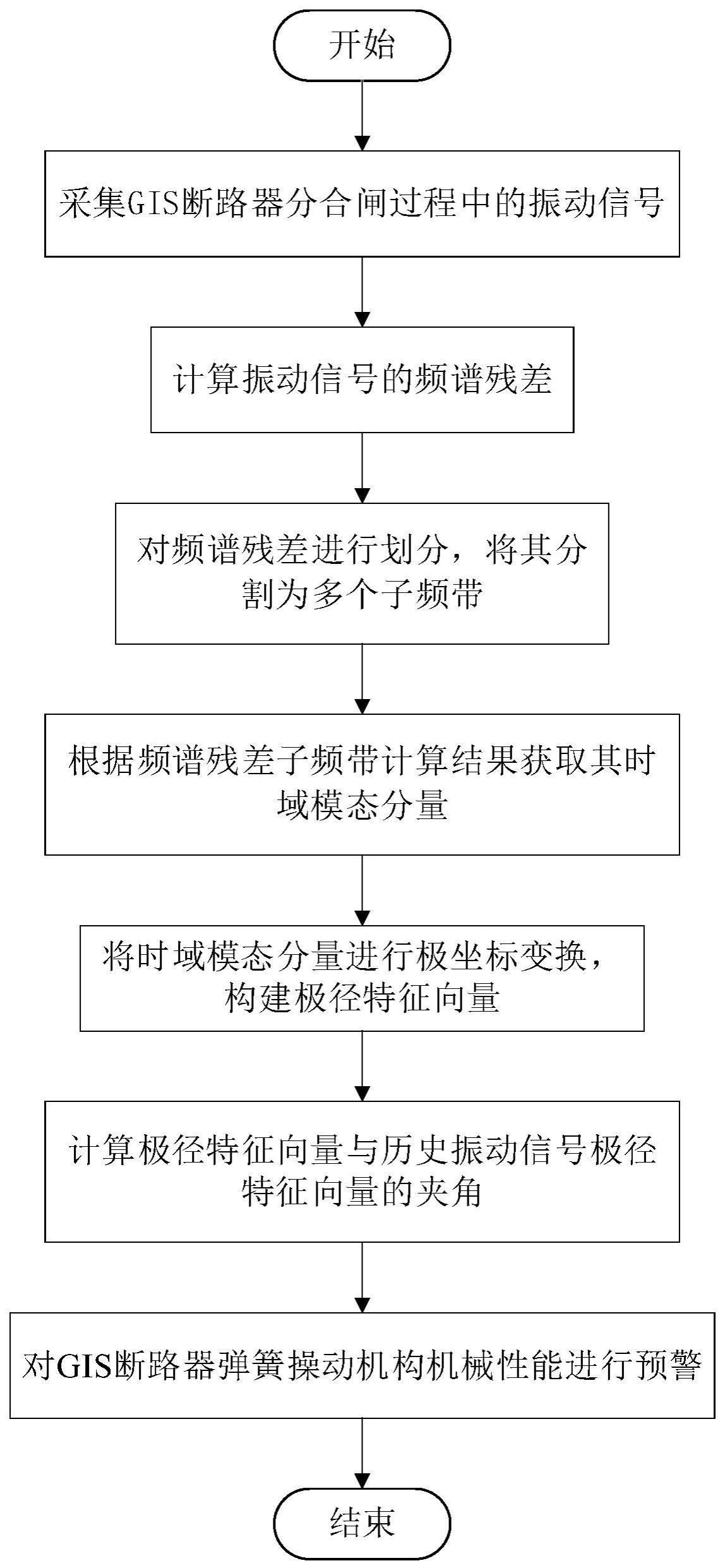
3、步骤1、采集gis断路器分合闸过程中的振动信号s(i);
4、步骤2、计算gis断路器振动信号的频谱残差;
5、步骤3、对gis断路器振动信号频谱残差进行划分,将其分割为多个子频带;
6、步骤4、根据gis断路器振动信号的频谱残差子频带计算结果获取其时域模态分量;
7、步骤5、将gis断路器振动信号频谱残差的时域模态分量进行极坐标变换,构建极径特征向量;
8、步骤6、计算极径特征向量与历史gis断路器弹簧操动机构振动信号极径特征向量的夹角,根据该夹角的大小对gis断路器弹簧操动机构的机械性能进行预警。
9、进一步地,步骤1中,所述的振动信号由放置在gis断路器弹簧操动机构箱外壳上的振动加速度传感器获取,其采样频率为fs,采样点长度为n0。
10、进一步地,步骤2的具体步骤如下:
11、2a.对gis断路器振动信号进行傅里叶变换,获取gis断路器振动信号的频谱;
12、2b.对gis断路器振动信号的频率进行标准化处理,将频率标准化至[0,π]内,所述的标准化计算公式为:
13、f'=πf/fmax
14、式中:f'表示标准化后的频率;f和fmax分别表示振动信号的频率及其最大值;
15、2c.根据gis断路器振动信号频谱幅值的对数变换结果计算均值谱,计算公式为:
16、al(f)=h(f)×l(f)
17、l(f)=log(v(f))
18、
19、式中:al(f)表示振动信号的均值谱;l(f)表示振动信号频谱幅值的对数变换结果;h(f)表示局部滤波器;q表示系数;v(f)表示振动信号的频谱;
20、2d.根据振动信号的均值谱计算频谱残差,计算公式为:
21、r(f)=l(f)-al(f)
22、式中:r(f)表示频谱残差。
23、进一步地,步骤3的具体步骤如下:
24、3a.计算gis断路器振动信号的频谱残差幅值的均值;
25、3b.确定频谱划分初始边界,即将两个连续极大值对应频率的中间值作为频谱分割的边界对应的计算公式为:
26、
27、式中:ωk_0=0和为自身两侧边界;
28、此时,振动信号的频谱被初步划分为m0个子频带,其中,第i段频谱信号记为vi,i=1,2,…,m0;m0表示频谱信号的段数;
29、3c.依次计算相邻两个子频带的互信息,若相邻两个子频带的互信息小于步骤3b中子频带内各个频谱分量幅值的平均值,则这两个子频带合并;否则,这两个子频带保持独立,根据子频带合并情况重新确定新的分界点;
30、3d.重复步骤3c,直至所有的子频带均保持独立,记子频带的个数为m。
31、进一步地,步骤4的具体步骤如下:
32、4a.记gis断路器振动信号的频谱残差的m个子频带范围为:此处,
33、4b.定义以为中心、宽度为的过渡段,构建带通滤波器其它频带范围上的滤波器其表示为:
34、
35、
36、
37、β(x)=x4(35-84x+70x2-20x3)
38、式中:x表示函数β(x)的自变量;ω表示频率;
39、4c.基于内积运算获取gis断路器振动信号频谱残差的时域模态分量,计算公式为:
40、
41、
42、
43、
44、式中:和分别是和的傅里叶变换;表示取(·)的复共轭函数;f-1[·]表示傅里叶逆变换;表示时域模态分量;vk表示第i个子频带对应的振动信号频谱,i=1,…,m。
45、进一步地,步骤5的具体步骤如下:
46、5a.对gis断路器振动信号频谱残差的时域模态分量进行归一化处理,其中,第k个信号的归一化计算公式为:
47、
48、式中:表示归一化后的时域模态分量;min(fk(m))和max(fk(m))分别表示第k个时域模态分量的最小值和最大值;fk(m)表示第k个时域模态分量;
49、5b.将归一化后的各个时域模态分量映射到极坐标空间,对应的计算公式为:
50、
51、
52、
53、
54、式中:rk(m)、和表示第k阶模态分量第m个时域采样点在极坐标中对应的极半径、正向极角和负向极角;表示振动信号第k阶模态分量在极坐标空间中的镜像对称旋转角;l为时间间隔因子;ξ为角度放大因子,且有ξ≤180°/m;
55、5c.将极坐标空间按照角度等间隔的原则划分为2p个扇区,所述扇区划分的计算公式为:
56、
57、0≤ri≤1
58、式中;φi表示第i个扇区的极角度;ri表示第i个扇区的极半径;
59、5d.统计极坐标空间中每个扇区的所有样本点,记为:此处,ni表示落在第i个扇区中样本点总数;
60、5e.基于每个扇区样本点的极径离散程度构建极径特征向量,计算公式为:
61、
62、
63、式中:表示极径离散程度;nr表示极径特征向量;r(x)表示样本点x的极半径;mean(r(xi))表示落在第i个扇区中所有样本点的极半径平均值。
64、进一步地,步骤6中,当夹角大于10°时,则判断gis断路器弹簧操动机构的机械性能发生劣化,需及时安排检修工作,所述的夹角的计算公式为:
65、
66、式中:θr表示夹角;n表示极径特征向量;nr0表示历史振动信号的极径特征向量;(nr·nr0)表示向量nr与nr0的内积运算;|·|表示向量的二范数。
67、本技术方案通过计算gis断路器弹簧操动机构振动信号频谱残差的时域模态分量,基于极坐标变换构建极径特征向量,根据极径特征向量与历史gis断路器弹簧操动机构振动信号极径特征向量的夹角的变化来判别gis断路器弹簧操动机构机械状态,该判断方法高效、准确,且易于实施,便于实现gis断路器弹簧操动机构机械性能的及时预警。
68、本发明所提及的gis断路器弹簧操动机构由于采用了上述技术方案,有效提高了gis断路器弹簧操动机构振动信号所含有效信息的辨识能力,使得其可以通过gis断路器弹簧操动机构振动信号实现其机械性能的准确预警,进而采取有效的运维措施,极大降低gis断路器弹簧操动机构的故障损坏率。
69、本发明的目的之二在于提供一种gis断路器弹簧操动机构机械性能预警系统,其用于实现上述的gis断路器弹簧操动机构机械性能预警方法。
70、本发明的目的之三在于提供执行发明目的之一的电子设备,其包括处理器、存储介质以及计算机程序,所述计算机程序存储于存储介质中,所述计算机程序被处理器执行时实现上述的gis断路器弹簧操动机构机械性能预警方法。
71、本发明的目的之四在于提供存储发明目的之一的计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的gis断路器弹簧操动机构机械性能预警方法。
72、本发明的一种gis断路器弹簧操动机构机械性能预警系统、电子终端、计算机可读存储介质用于执行本发明的一种gis断路器弹簧操动机构机械性能预警方法,当然也具有上述有益效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!