一种鸟类活动环境评价方法及装置与流程
本发明属于生态检测,具体涉及一种鸟类活动环境评价方法及装置。
背景技术:
1、现有鸟类活动环境监测通常采用鸟类行为观察装置、鸟类声音监测装置、鸟类追踪装置、生境参数监测装置来实现。鸟类行为观察装置通常是使用摄像机、红外线传感器、加速度计等设备,通过观察鸟类的行为活动来评价其生境环境,例如,可以记录鸟类的飞行轨迹、活动范围、觅食行为等信息,并通过分析这些数据来评估鸟类所处的环境质量和适应性。鸟类声音监测装置通过使用麦克风或声音传感器,记录鸟类的叫声和鸣叫频率等声音信息;通过对鸟类声音的分析和比较,可以评估鸟类在不同环境条件下的活动水平、种群密度和生态状况。鸟类追踪装置常常使用gps跟踪器、无线电标签等技术,将装置固定在鸟类身上,实时记录其位置、迁徙路线、栖息地利用情况等信息;通过对大量鸟类的追踪数据进行统计和分析,可以评估鸟类的栖息地选择、迁徙行为和活动范围等指标。生境参数监测装置于监测鸟类生境的各种环境参数,如温度、湿度、光照强度、植被覆盖度等;通过对这些参数的监测和分析,可以了解鸟类所处生境的质量和适宜程度。
2、除了装置本身,数据分析和模型建立方法也是评价鸟类活动环境的关键。通过对收集到的数据进行统计分析、空间分布模拟、物种分布模型等方法,可以评估鸟类的适应性、生境选择和种群健康状况。
3、然而,主流装置的建设和维护成本相对较高,需要投入大量的资金和资源。例如,摄像机、声音记录器和其他传感器的购置和安装,数据存储和处理设备的维护等都需要一定的经费和技术支持。同时,主流装置通常需要进行离线数据分析,无法提供实时和连续的鸟类活动数据,这意味着无法即时获得最新的鸟类活动信息,对于追踪瞬时变化和动态模式的需求有所限制,实时性和连续性较差。另外,主流装置无法实现大范围、大规模监测。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种鸟类活动环境评价方法及装置。本发明要解决的技术问题通过以下技术方案实现:
2、本发明实施例提供了一种鸟类活动环境评价方法,包括步骤:
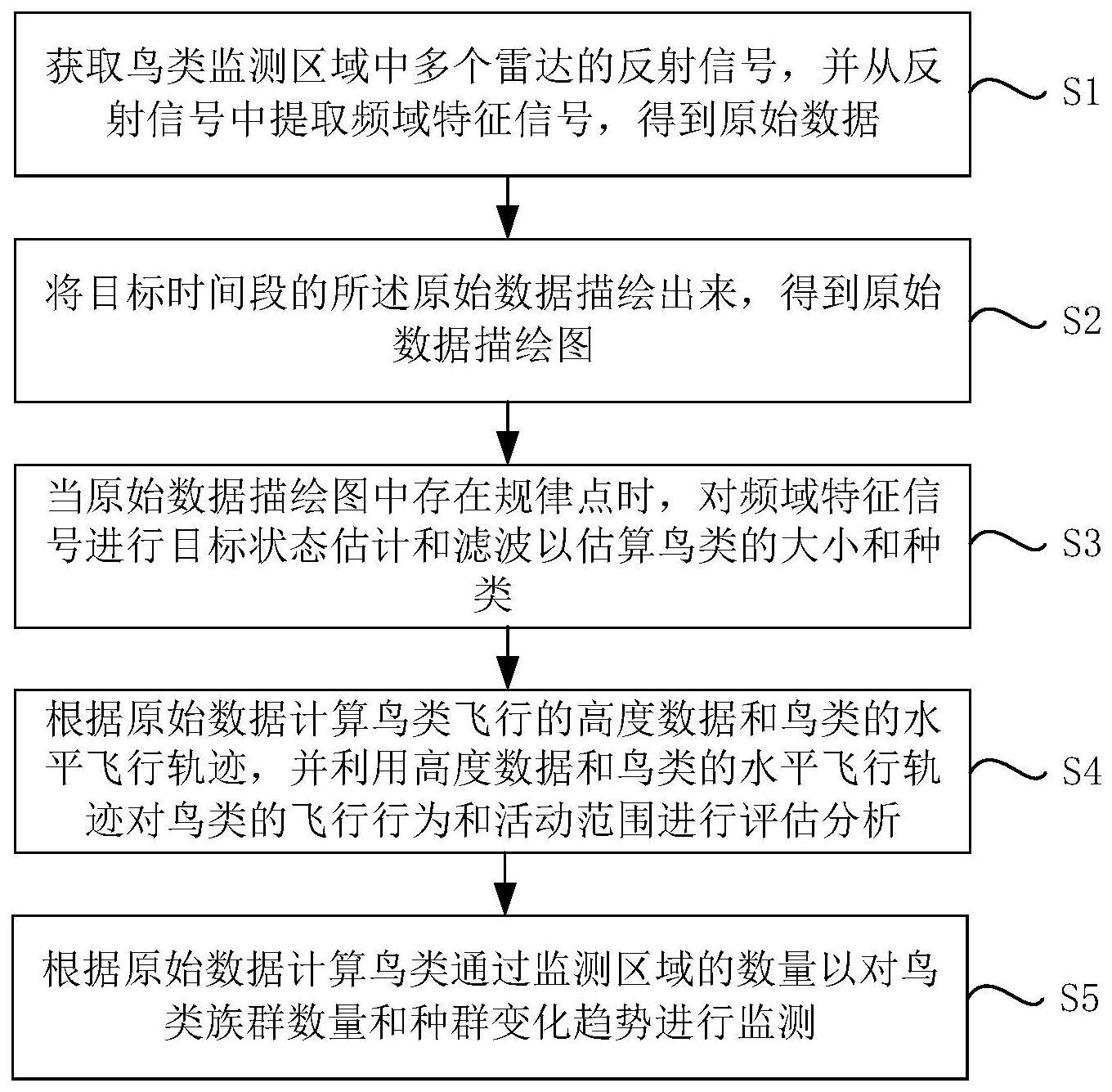
3、获取鸟类监测区域中多个雷达的反射信号,并从所述反射信号中提取频域特征信号,得到原始数据;
4、将目标时间段的所述原始数据描绘出来,得到原始数据描绘图;
5、当所述原始数据描绘图中存在规律点时,对所述频域特征信号进行目标状态估计和滤波以估算鸟类的大小和种类;
6、根据所述原始数据计算鸟类飞行的高度数据和鸟类的水平飞行轨迹,并利用所述高度数据和所述鸟类的水平飞行轨迹对鸟类的飞行行为和活动范围进行评估分析;
7、根据所述原始数据计算鸟类通过所述监测区域的数量以对鸟类族群数量和种群变化趋势进行监测。
8、在本发明的一个实施例中,所述鸟类监测区域包括多个雷达监测点,每个雷达监测点设置有水平监视雷达和/或垂直监视雷达;
9、所述多个雷达的天线方向和覆盖范围涵盖鸟类的飞行路径和活动区域。
10、在本发明的一个实施例中,从所述反射信号中提取频域特征信号,得到原始数据,包括:
11、将所述反射信号转换为数字信号;
12、利用快速傅里叶变换法从所述数字信号中提取所述频域特征信号,得到原始数据。
13、在本发明的一个实施例中,将目标时间段的所述频域特征信号描绘出来,得到原始数据描绘图,包括:
14、利用显控软件将所述频域特征信号描绘出来,得到原始数据描绘图,并观察所述原始数据描绘图中是否存在规律点。
15、在本发明的一个实施例中,当所述原始数据描绘图中存在规律点时,对所述频域特征信号进行目标状态估计和滤波以估算鸟类的大小和种类,包括:
16、当所述原始数据描绘图中存在规律点时,利用卡尔曼滤波算法对所述原始数据进行目标状态估计和滤波,得到滤波数据;
17、利用所述滤波数据估算目标反射截面积以确定鸟类的大小,其中,所述目标反射截面积为:
18、rcs=(4*pi)^3*r^4*l*pr/(pt*gt*gr*λ^2*gs)
19、=(4*pi)^3*r^4*l*pr/(pt*gt*gr*(c/f)^2*gs)
20、其中,pi为圆周率,r为目标到雷达的距离,l为目标的长度,pr为接收回波的功率,pt为发射功率,gt为发射天线增益,gr为接收天线的增益,λ为波长,gs为系统损耗因子,c为光速,f为工作频点;
21、利用已知鸟种类与已知目标反射截面积的关系评估鸟种类与所述目标反射截面积的对应关系,或者,利用训练好的yolo模型对拍摄的图片进行鸟种类识别,并根据所述滤波数据中雷达的方位角和仰角判断鸟种类与所述目标反射截面积的对应关系。
22、在本发明的一个实施例中,根据所述原始数据计算鸟类飞行的高度数据,包括:
23、根据所述原始数据中的目标距离和目标角度获取鸟类飞行的高度数据,并形成高度视角图。
24、在本发明的一个实施例中,根据所述原始数据计算鸟类的水平飞行轨迹,包括:
25、利用所述原始数据中的目标距离和雷达相对目标的方位角确定的多个三维空间点,使用dbscan密度聚类算法计算所述目标运动轨迹;
26、根据所述原始数据中的目标距离、雷达相对目标方位角和雷达相对目标俯仰角计算目标在wgps84坐标系下的坐标;
27、根据所述目标运动轨迹和所述目标在wgps84坐标系下的坐标形成鸟类的水平飞行轨迹。
28、在本发明的一个实施例中,根据所述目标距离、所述方位角和雷达相对目标俯仰角计算目标在wgps84坐标系下的坐标,包括:
29、利用所述滤波数据中的目标距离、所述方位角和雷达相对目标俯仰角计算目标在雷达坐标系下的坐标:
30、
31、
32、z1=r*sin(θ);
33、其中,r为目标距离,θ为雷达相对目标的俯仰角,为雷达相对目标的方位角;
34、将所述目标在雷达坐标系下的坐标转换为目标在三维坐标系下的坐标:
35、x=rx*x1+ry*y1+rz*z1;
36、y=ux*x1+uy*y1+uz*z1;
37、z=vx*x1+vy*y1+vz*z1;
38、其中,rx、ry、rz、ux、uy、uz、vx、vy、vz为雷达相对地球旋转时旋转矩阵中的元素,(x1,y1,z1)为目标在雷达坐标系下的坐标;
39、根据地球椭球体模型,将所述目标在三维坐标系下的坐标转换为目标在火星坐标系下的经纬度:
40、λ=atan2(y,x);
41、
42、h=sqrt(x^2+y^2+z^2)–n;
43、其中,λ为经度,为纬度,h为高度,n为椭球体上该点处的曲率半径,(x,y,z)为目标在三维坐标系下的坐标;
44、采用gcj02_to_wgs84函数,将所述目标在火星坐标系下的经纬度转换为目标在wgps84坐标系下的坐标。
45、在本发明的一个实施例中,根据所述原始数据计算鸟类通过所述监测区域的数量以对鸟类族群数量和种群变化趋势进行监测,包括:
46、根据所述原始数据计算鸟类在所述监测区域内每日平均目标通过数、每日每小时平均目标通过数、每小时平均目标通过数、平均方向数据;
47、利用所述每日平均目标通过数、所述每日每小时平均目标通过数、所述每小时平均目标通过数、所述平均方向数据对鸟类族群数量和种群变化趋势进行监测。
48、本发明的另一实施例提供了一种鸟类活动环境评价装置,包括:
49、信号获取模块,用于获取鸟类监测区域中多个雷达的反射信号,从所述反射信号中提取频域特征信号,得到原始数据;
50、数据描绘模块,用于将目标时间段的所述原始数据描绘出来,得到原始数据描绘图;
51、鸟类估算模块,用于当所述原始数据描绘图中存在规律点时,对所述频域特征信号进行目标状态估计和滤波以估算鸟类的大小和种类;
52、鸟类飞行评估模块,用于根据所述原始数据计算鸟类飞行的高度数据和鸟类的水平飞行轨迹,并利用所述高度数据和所述鸟类的水平飞行轨迹对鸟类的飞行行为和活动范围进行评估分析;
53、鸟类种群监测模块,用于根据所述原始数据计算鸟类通过所述监测区域的数量以对鸟类族群数量和种群变化趋势进行监测。
54、与现有技术相比,本发明的有益效果:
55、本发明的鸟类活动环境评价方法通过获取雷达信号,并通过对雷达信号进行处理,估算了鸟类的大小和种类,获取鸟类飞行的高度数据和鸟类的水平飞行轨迹以对鸟类的飞行行为和活动范围进行评估分析,获取鸟类通过所述监测区域的数量对鸟类族群数量进行监测,扩充了目前监控评价鸟类活动环境的装置和方法,能够以更低的成本来监控鸟集群的迁徙等行为,具有大范围监测能力、实时性和连续性、无依赖光照和天气条件、高度自动化以及适用于大规模研究等优势,能够提供全面、准确的鸟类活动数据,更好地分析评估鸟类的行为和生态特征。
- 还没有人留言评论。精彩留言会获得点赞!