一种多相机工业摄影测量系统校准方法与流程
本发明涉及摄影测量校准,具体而言,涉及一种多相机工业摄影测量系统校准方法。
背景技术:
1、多相机工业摄影测量系统或相机阵列由2台及以上的工业测量相机、定向尺、标准尺、测量笔、靶标、解算软件和控制器等单元组成。工业测量相机是系统的核心传感器,其结构稳定,系统畸变已知。
2、在测量开始前,需要采用定向尺、标准尺或控制场对测量场内架设的两台工业测量相机进行定向,从而精确确定两台相机之间相对的位置和姿态。测量过程中,表面布设有靶标的被测物体需要同时在两台工业测量相机上成像,经过图像处理、同名像点匹配和三角形交会原理,实时解算出靶标在物方坐标系下的空间三维坐标,从而达到对动/静态物体实时测量的目的。由于多相机工业摄影测量系统或相机阵列具有非接触测量、瞬时测量、数字化等特点,目前已在国防军工、重大装备等多领域得到了大量应用,因此其校准需求也应运而生。目前,国家还没有计量检定规程或者计量校准规范对多相机工业摄影测量系统或相机阵列的校准方法进行规定。通常情况下,厂家会参考单相机工业摄影测量系统的校准方法,即gb/t34890-2017《产品几何技术规范(gps)数字摄影三坐标测量系统的验收检测和复检检测》的方法,对系统的测长误差进行校准。具体的做法是:在生产商规定的最大测量范围内布设测量场,并设置可平滑移动的运动装置,该运动装置的运动距离可以通过高精度双频激光干涉仪测得。在运动装置上粘贴摄影测量靶标。运动装置在位置一的时候采用被校准的双相机工业摄影测量系统对运动装置上的靶标点进行测量,当运动装置运动到位置二的时候对整个校准场进行拍摄,并记录位置一到位置二的距离l1。依次将运动装置移动到位置三、四、五等,并记录运动装置移动的距离l2、l3、l4。由于双频激光干涉仪的测量精度很高,可以作为运动装置移动距离的参考值。根据被校准系统测得的靶标点坐标解算出运动装置移动的距离。对每个距离测量,比较计算误差δ的值,误差δ与该长度对应的最大允许误差相比,对于所有长度满足δ≤|mpe|时,校准结果符合计量要求。目前的校准方法局限性有两点,一是不能对系统的坐标测量精度进行校准,二是必须在专业的测量场内进行校准。对于固定安装的双相机工业摄影测量系统或相机阵列,需要把相机拆下来送检,采用这种方法进行校准极不现实。
3、因此需要设计一种校准方法,实现精度校准,同时简化校准的场地布置需求以扩宽校准方法的应用场景。
技术实现思路
1、本发明的目的在于提供一种多相机工业摄影测量系统校准方法,其可以实现精度校准,同时简化校准的场地布置需求以扩宽校准方法的应用场景。
2、本发明的实施例通过以下技术方案实现:
3、一种多相机工业摄影测量系统校准方法,包括以下步骤:
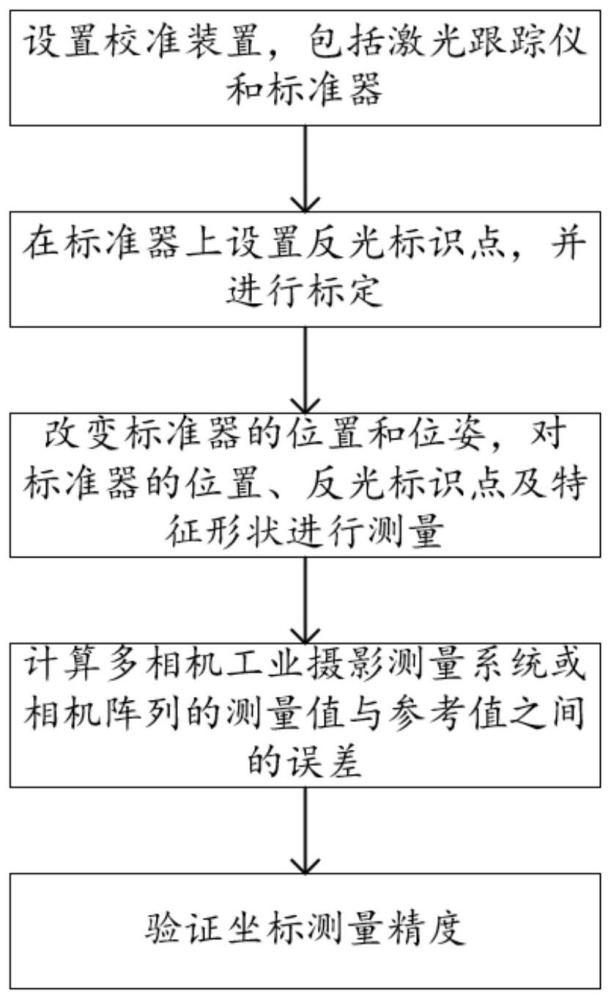
4、设置校准装置,所述校准装置包括激光跟踪仪和标准器,所述标准器为三维结构;
5、在所述标准器上设置多个按一定方式排列的反光标识点;并对标识点进行标定;
6、在所述标准器上设置固定靶标座或特征形状部件;
7、改变标准器的位置和位姿,同时用激光跟踪仪和多相机工业摄影测量系统对所述标准器上的位置、反光标识点及特征形状进行测量;
8、通过所述校准装置计算多相机工业摄影测量系统或相机阵列的测量值与参考值之间的误差;
9、通过所述反光标识点验证坐标测量精度。
10、优选地,所述标准器的材质为陶瓷或大理石或碳纤维复合材料或铟钢。
11、优选地,多个所述反光标识点的排列方式为:多个所述反光标识点排列呈二维或三维,且排列呈现为具备几何特征的形状。
12、优选地,所述反光标识点为边缘整齐的圆形,制作材料包括玻璃微珠。
13、优选地,所述特征形状部件采用半球状部件或圆柱状部件或圆锥状部件或多面体状部件。
14、优选地,通过所述校准装置计算多相机工业摄影测量系统或相机阵列的测量值与测量参考值之间的误差的方法为:
15、移动所述校准装置,并调整所述校准装置的位姿,以所述激光跟踪仪所测得的指定点的移动距离作为所述测量参考值。
16、优选地,所述指定点是所述固定靶标座对应的测量点,或所述特征形状部件所产生的特定点,或所述三维结构的特征点。
17、优选地,通过所述反光标识点验证坐标测量精度的方法为:
18、标定所述反光标识点,以所述反光标识点的三维空间坐标值作为精度参考值验证坐标测量精度。
19、优选地,标定所述反光标识点采用三坐标或单相机工作摄影测量系统或扫描仪。
20、优选地,以所述反光标识点的三维空间坐标值作为精度参考值验证坐标测量精度的方法为:
21、通过测量软件将不同位置的点空点坐标整合在一起,验证全局坐标测量精度;
22、和/或直接验证局部坐标测量精度。
23、本发明实施例的技术方案至少具有如下优点和有益效果:
24、本发明既可以计算多相机工业摄影测量系统或相机阵列的测量值与参考值之间的误差,又可以验证坐标测量精度;
25、本发明所搭建的校准系统结构稳定,在校准执行时具备很高的可靠性和准确性;
26、本发明在校准时搭建的校准系统结构简单,不仅能够对系统的坐标测量精度进行校准,而且还可以在测量需求在任意的测量场内进行校准,相比传统的校准方法应用面更广;
27、本发明的操作实施过程简单,易于上手,方便不同类型工作人员在不同使用环境下上手,在此情况下依然可以保证校准的精准性;
28、本发明设计合理、结构简单,便于推广和实施。
技术特征:
1.一种多相机工业摄影测量系统校准方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种多相机工业摄影测量系统校准方法,其特征在于,所述标准器的材质为陶瓷或大理石或碳纤维复合材料或铟钢。
3.根据权利要求1所述的一种多相机工业摄影测量系统校准方法,其特征在于,多个所述反光标识点的排列方式为:多个所述反光标识点排列呈二维或三维,且排列呈现为具备几何特征的形状。
4.根据权利要求3所述的一种多相机工业摄影测量系统校准方法,其特征在于,所述反光标识点为边缘整齐的圆形,制作材料包括玻璃微珠。
5.根据权利要求1所述的一种多相机工业摄影测量系统校准方法,其特征在于,所述特征形状部件采用半球状部件或圆柱状部件或圆锥状部件或多面体状部件。
6.根据权利要求1所述的一种多相机工业摄影测量系统校准方法,其特征在于,通过所述校准装置计算多相机工业摄影测量系统或相机阵列的测量值与测量参考值之间的误差的方法为:
7.根据权利要求6所述的一种多相机工业摄影测量系统校准方法,其特征在于,所述指定点是所述固定靶标座对应的测量点,或所述特征形状部件所产生的特定点,或所述三维结构的特征点。
8.根据权利要求1所述的一种多相机工业摄影测量系统校准方法,其特征在于,通过所述反光标识点验证坐标测量精度的方法为:
9.根据权利要求8所述的一种多相机工业摄影测量系统校准方法,其特征在于,标定所述反光标识点采用三坐标或单相机工作摄影测量系统或扫描仪。
10.根据权利要求8所述的一种多相机工业摄影测量系统校准方法,其特征在于,以所述反光标识点的三维空间坐标值作为精度参考值验证坐标测量精度的方法为:
技术总结
本发明提供了一种多相机工业摄影测量系统校准方法,涉及摄影测量校准技术领域,其目标是可以实现精度校准,同时简化校准的场地布置需求以扩宽校准方法的应用场景,包括以下步骤:设置校准装置,校准装置包括激光跟踪仪和标准器,标准器为三维结构;在标准器上设置多个按一定方式排列的反光标识点,并对反光标识点的位置进行标定;在标准器上设置固定靶标座或特征形状部件;改变标准器的位置和位姿,对标准器上的位置、反光标识点及特征形状进行测量;通过校准装置计算多相机工业摄影测量系统或相机阵列的测量值与参考值之间的误差;通过反光标识点验证坐标测量精度。本发明具有准确进行精度校准且应用场景广的优点。
技术研发人员:唐琴琼,邓育红,李建勤,汪威,肖钞
受保护的技术使用者:四川省产业计量测试研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!