基于多星观测的单目标轨道确定方法、设备、介质和产品
本技术涉及空间目标跟踪轨道,尤其涉及轨道飞行目标的跟踪。
背景技术:
1、空间目标跟踪是利用目标和卫星的动力学模型和目标的先验信息,及时调整传感器的指向,使其指向目标。结合实时跟踪算法,可以更新目标的初始星历来加强跟踪。为了判断空间物体是否可以被跟踪,需要增加传感器指向的角速度阈值,以保证传感器能够追上目标。
2、为了获得高质量的跟踪数据,大多数空间目标跟踪任务都是由装载空间可见光相机(sso)的观测卫星来完成的。例如,理想情况下,在12月,800公里高度的黎明-黄昏太阳同步卫星可以每天不间断地跟踪一个地球静止物体超过3小时。与一般的监视类似,由于相对速度高,跟踪低轨道飞行目标(leo)是最具挑战性的。
3、早期星载光学相机的目标跟踪由单颗卫星完成。相关工作主要集中在开发实时跟踪算法以支持跟踪任务。其中包括许多线性和非线性算法,如kf、ekf和ukf,可用于空间目标跟踪。最近,一些研究人员致力于开发一种更健壮的滤波器来处理实际应用中经常出现的测量故障和稀疏测量问题,以及跟踪可机动的目标。
4、但是sbo观测有其固有的缺陷,即sbo传感器只能获得被观测空间物体的方向信息。因此,在目标在观测系下的方向总是存在最大的估计不确定性。此外,由于sbo观测的限制,跟踪的连续性通常不理想,特别是对leo目标的跟踪。
5、因此,为了提高跟踪性能,需要使用多颗卫星来执行任务。也就需要找到新的技术,来支持多观测卫星下的单目标跟踪技术。
技术实现思路
1、本发明目的是为了解决现有针对轨道飞行目标的跟踪精确度低的问题,提供了基于多星观测的单目标轨道确定方法、设备、介质和产品。
2、本发明是通过以下技术方案实现的,本发明一方面,提供一种基于多星观测的单目标轨道确定方法,所述方法包括:
3、步骤1、建立多星观测仅角度测量模型,具体包括:
4、步骤1.1、通过目标卫星在观测卫星本体系下的方位角和俯仰角的测量,创建在观测卫星体坐标系下的从观察节点指向目标节点的视线单位向量;
5、步骤1.2将所述在观测卫星体坐标系下的从观察节点指向目标节点的视线单位向量转换为惯性坐标系下的视线单位向量;
6、步骤1.3、获取每颗观测卫星的观测值;
7、步骤1.4、对每颗卫星的观测值进行处理,得到多观测卫星观测单目标的观测模型:
8、
9、其中,y2k-1、y2k代表第k颗观测卫星观测目标时的观测值,xobsk,yobsk,zobsk为第k颗观测卫星在惯性系下的位置分量,
10、为目标的状态向量为目标的位置和速度;
11、步骤2、获得多观测卫星单目标观测时的状态模型;
12、步骤3、对观测模型和状态模型进行线性化离散化处理;
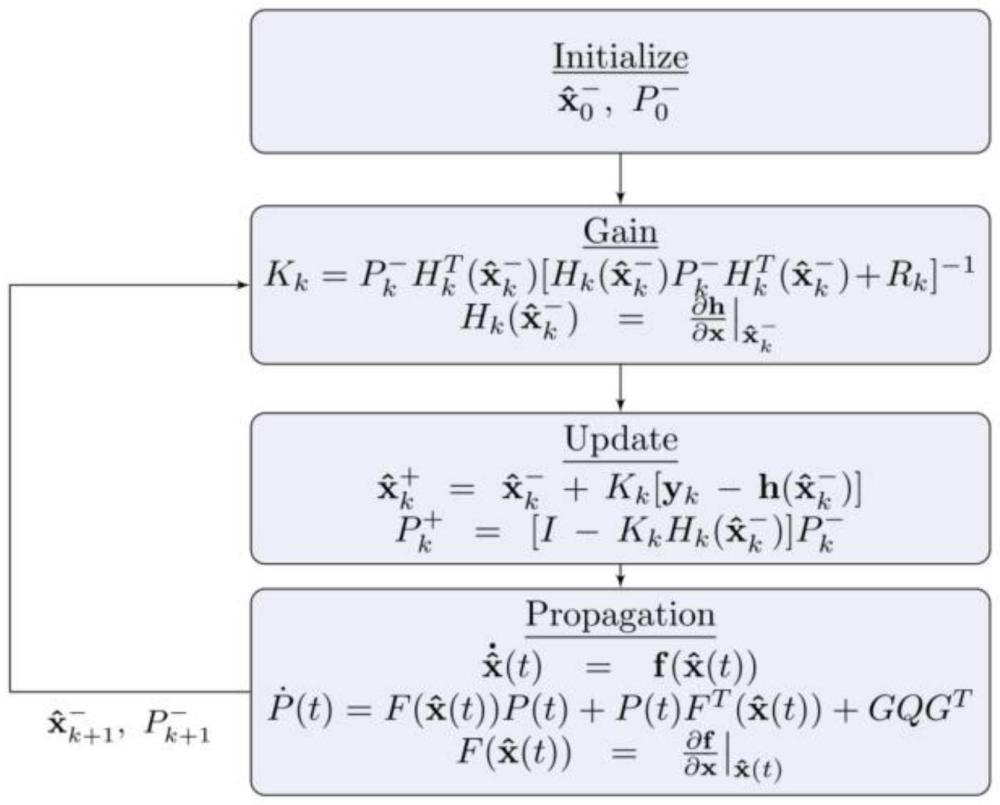
13、步骤4、进行扩展卡尔曼滤波迭代计算并完成目标观测定轨。
14、进一步地,步骤1.1中,所述在观测卫星体坐标系下的从观察节点指向目标节点的视线单位向量为:
15、
16、其中,az为目标卫星在观测卫星本体系下的方位角,el为目标卫星在观测卫星本体系下的俯仰角。
17、进一步地,步骤1.2,具体包括:
18、步骤1.2.1、将从卫星本体系变换到观测星的lvlh相对运动坐标系下的视线单位向量,具体为:
19、
20、其中,φ,θ和ψ是滚转、俯仰和偏航角三个欧拉角;
21、步骤1.2.2、将从观测星的lvlh相对运动坐标系转到惯性坐标系系下的视线单位向量,具体为:
22、
23、其中,i是观测星的轨道倾角,ω是升交点赤经,θ是近心点角距和真近点角之和。
24、进一步地,步骤1.3,具体包括:
25、定义两个平面,其中每个平面都包含目标和相应观测卫星节点,每个平面都由一个点和平面的法向量来描述;
26、第一个平面的点为观测卫星节点,第一个平面法向量定义为:
27、nobsk,plane1=losobsk→tar×robsk→o
28、=[xobsk,plane1 yobsk,plane1 zobsk,plane1]t
29、其中,robsk→o为观测卫星位置单位向量,由于观测卫星位置robsk为已知量,因此该向量已知,nobsk,plane1为第一个平面的法向量,losobsk→tar为观测卫星在惯性坐标系下的视线单位向量;
30、
31、第一个平面的表达式为:
32、xobsk,plane1(x-xobsk)+yobsk,plane1(y-yobsk)+zobsk,plane1(z-zobsk)=0
33、其中,x,y,z为观测目标在惯性系下的位置分量;xobsk,yobsk,zobsk为观测卫星在惯性系下的位置分量;
34、第二个平面的点仍然为观测卫星节点,第二个平面法向量定义为:
35、nobsk,plane2=nobsk,plane1×losobsk→tar
36、=[xobsk,plane2 yobsk,plane2 zobsk,plane2]t
37、其中,nobsk,plane2为第二个平面法向量,losobsk→tar为观测卫星在惯性坐标系系下的视线单位向量;
38、第二个平面的表达式为:
39、xobsk,plane2(x-xobsk)+yobsk,plane2(y-yobsk)+zobsk,plane2(z-zobsk)=0
40、将两个平面表达式联立,可得到观测卫星到目标的测量值方程:
41、
42、通过求解测量值方程可以得到观测值为(x,y,z)。
43、进一步地,步骤2中,所述多观测卫星单目标观测时的状态模型包括目标的状态向量和第k颗观察卫星的状态向量:
44、所述目标的状态向量为目标的位置和速度:
45、
46、其中,rtar为目标的位置,vtar为目标的速度;
47、第k颗观测卫星的状态向量为观测卫星自身的位置和速度:
48、
49、其中,robsk为观测卫星自身的位置,vobsk为观测卫星自身的速度。
50、进一步地,所述状态模型线性化离散化处理,具体包括:
51、目标的状态微分方程为:
52、
53、rtar,vtar为目标的位置和速度向量;
54、对其进行离散化,有目标状态离散化方程:
55、
56、xtar(k)为tk时刻目标的状态。
57、进一步地,所述观测模型性化离散化处理,具体包括:
58、测量方程离散化模型和矩阵为:
59、
60、
61、式中,yk为离散化后的测量方程,为tk时刻卫星观测到的目标卫星的惯性系位置,为tk时刻观测卫星的惯性系位置。
62、第二方面,本发明提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时执行如上文所述的一种基于多星观测的单目标轨道确定方法的步骤。
63、第三方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质中存储有多条计算机指令,所述多条计算机指令用于使计算机执行如上文所述的一种基于多星观测的单目标轨道确定方法。
64、第四方面,本发明提供一种计算机程序产品,所述计算机程序被处理器执行时实现如上文所述的一种基于多星观测的单目标轨道确定方法。
65、本发明的有益效果:
66、与传统的单星观测目标定轨相比,本发明中的双星观测能够在相同的观测条件下更快的完成观测的收敛,并且观测定轨精度更高。
67、此外,ekf单星观测定轨虽然能够在合适的不同的初始状态误差下最终定位稳定并收敛,但是随着初始状态误差增大,收敛所需时间和最终定位和定速的估计误差也会增大,而本发明中的双星观测定轨受测量误差和初始状态误差的影响更小,更适合高精度定轨。
68、本发明总结传统的单星仅角度观测模型,提出一种基于视线的多星定轨的观测模型,给出ekf滤波模型以及新的观测模型在ekf上的应用。进行二体模型下的单星以及多星定轨仿真,分析初始状态误差、观测角度噪声等参数对滤波定轨的影响,并基于天基光学相机观测约束模型进行目标可观测窗口的仿真。基于仿真结果,可知在观测条件较好的情况下,双星定轨的精度更高,收敛更快,同时受测量误差和初始状态误差的影响更小,更适合高精度定轨,在任务分配中应优先考虑。
69、本发明适用于空间目标探测技术天基光学观测领域。
- 还没有人留言评论。精彩留言会获得点赞!