一种小动态范围双光梳组合测距装置及测距方法与流程
本发明是关于一种小动态范围双光梳组合测距装置及测距方法,涉及光学精密计量领域。
背景技术:
1、双光梳测量系统利用两台具有微小重复频率之差的光频梳,通过光频梳之间梳齿对梳齿的外差原理能产生~104个外差信号进行协调测量,在高精度、高速率、大模糊范围方面提供了独一无二的综合性能。基于光纤光梳的双光梳系统,其相位噪声波动范围达到约104弧度,使得时间抖动达到了约100纳秒水平,限制了双光梳系统的测量精度。
2、传统的时间抖动小、相位稳定的双光梳测量系统都需要外加噪声补偿措施,如紧密锁定法及后处理校正法。这些方法通常系统较为复杂或处理步骤较为繁琐。实际上许多双光梳应用中,只关注参考干涉信号与测量干涉信号之间的时延抖动和相位差稳定性,而不关注其自身的相位稳定性和时间抖动。研究证明,参考干涉信号与测量干涉信号之间的时延抖动主要受到光源的频率噪声和探测器的强度噪声影响,当参考信号与测量信号脉冲间隔时间越短,频率噪声引起的干涉信号之间的时延抖动越小。当脉冲间隔时间足够小时,频率噪声对测量-参考干涉信号之间时延的影响可以忽略,此时时延抖动主要受到系统强度噪声的影响,而强度噪声引起的光频梳每根纵模的相位噪声为随机噪声,故采用相频斜率计算时延,时延抖动引起的测距误差又被进一步放大。
3、双光梳测距有两种经典方法,第一种为飞行时间法,其被测距离可以通过参考干涉信号和测量干涉信号包络之间的时间延迟δt得到,这种方法特点是非模糊范围大,一般能够达米量级,精度一般为微米至百纳米量级,精度主要受到干涉信号之间的时延抖动影响。第二种方法为载波干涉法,其被测距离可通过参考干涉信号和测量干涉信号之间的载波相位差得到,这种方法的精度主要受到干涉信号载波相位差稳定性的影响,当相位差稳定时,精度一般能够达到纳米量级,但非模糊范围小,只有半个载波波长,一般在百nm量级。受到双光梳系统相位噪声的影响,目前没有外接噪声补偿装置的双光梳测距系统载波相位差的抖动是远远大于2π的,此时载波相位差信息无法使用,载波干涉法是失效的。因此,没有外接噪声补偿装置的双光梳测距方法只利用飞行时间信息,通过飞行时间法获取被测距离值,此时干涉信号之间的时间抖动极大的限制了双光梳系统的测量精度,限制了其高精度的测距应用。
4、根据研究结论,在参考-测量干涉信号时延较小的一段区间内,不仅时间抖动较小,而且载波相位差也趋于稳定,这里所说的稳定是指短时间相干平均后的飞行时间测量精度能达到λc/4以下,载波相位差抖动的峰峰值在2π以内。此时利用飞行时间的测量结果来确定半载波波长λc/2的整数倍,然后过渡到载波相位差测量结果,实现小范围、高精度、高速度的绝对距离测量。相比于传统的相位稳定的双光梳测量系统,该方法无需添加任何噪声补偿方法即可同时利用飞行时间信息和载波相位信息实现高精度高速率的绝对距离测量。该方法通过控制频率噪声的积分时间,构建了无需噪声补偿的相位稳定双光梳系统,实现了毫米级动态范围内纳米级精度的绝对距离测量。该方法有两个局限性,第一是要求两台光频梳的重复频率和载波包络偏移频率均锁定,其中载波包络偏移频率锁定是非常复杂的,锁定载波包络偏移频率的目的是为了精确的溯源光频率。第二是参考干涉信号和测量干涉信号通过一个探测器接收,该方法实现测距的基本要求是两个干涉信号不重叠,因此在初始状态下参考镜和测量镜需要设置一个初始的光程差,在2mm左右。这导致上述方法牺牲了2mm的动态测距范围(相位差稳定的测距范围仅为5mm左右),此外也牺牲了相位精度最高的一段测距范围(参考臂和测量臂近似等长的情况下载波相位差最稳定)。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,针对上述问题,本发明的目的是提供一种相位差稳定的小动态范围双光梳组合测距装置及测距方法。
2、为了实现上述发明目的,本发明的技术方案为:
3、第一方面,本发明提供的一种小动态范围双光梳组合测距方法,包括:
4、调节双光梳测距光路,使得初始状态下参考干涉信号和测量干涉信号时延基本为0,此时双光梳测距系统载波相位差噪声最小;
5、通过参考干涉信号与测量干涉信号的载波相位差求得距离值dc:
6、
7、其中,为参考干涉信号和测量干涉信号之间的载波相位差,λc为空气中的载波波长,nc表示半载波波长的整数周期,采用飞行时间法的测距结果进行确定。
8、进一步地,还包括修正测距结果的步骤,包括:
9、获取到距离值dc后,根据双光梳测距光路中的温度补偿温度漂移引起的测距误差,修正后的测距结果为dc′:
10、dc′=dc-kδe
11、其中,k为温度补偿系数,δe为光梳测距光路中当前温度与开启测距时初始温度之差。
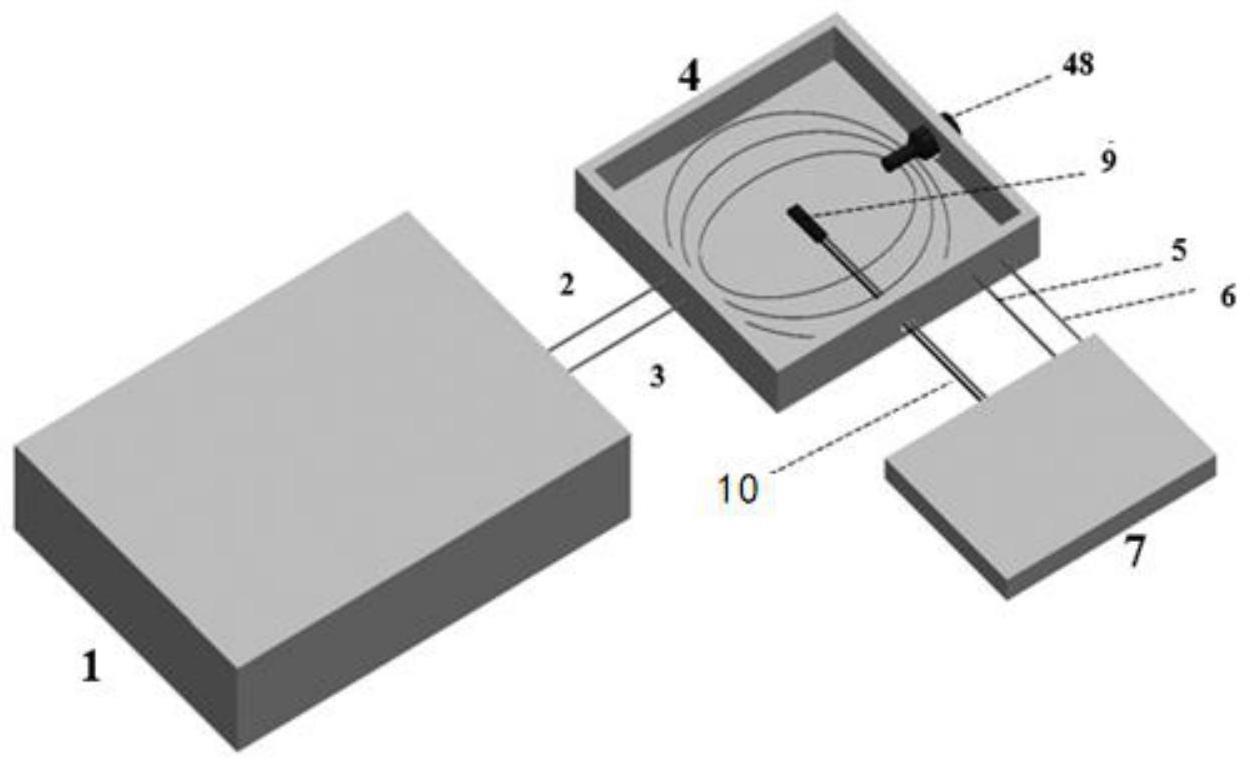
12、第二方面,本发明还提供一种小动态范围双光梳组合测距装置,该装置包括双光梳光源、第一保偏光纤、第二保偏光纤、测距光路模块、第三保偏光纤、第四保偏光纤和信号探测与处理模块;其中,所述双光梳光源中的光源为重频锁定,偏频自由运行;
13、所述双光梳光源通过所述第一保偏光纤和第二保偏光纤为所述测距光路模块分别输入信号光和本振光信号,所述测距光路模块用于输出空间光到目标靶镜,所述测距光路模块将输出的参考干涉信号和测量干涉信号通过所述第三保偏光纤和所述第四保偏光纤分别输出进入到所述信号探测与处理模块,所述信号探测与处理模块通过参考干涉信号与测量干涉信号的载波相位差解算出测距结果。
14、进一步地,所述测距光路模块包括第一光纤分束器、第二光纤分束器、第一光纤耦合器、第二光纤耦合器、光纤环形器、第一光纤滤波器、第二光纤滤波器和光纤准直器;
15、所述双光梳光源通过光纤输出两路重频分别为fr1和fr2的飞秒激光束作为信号光和本振光,经所述第一光纤分束器和第二光纤分束器各分为两路,其中,一路经所述第一光纤耦合器合光发生干涉通过所述第一光纤滤波器后通过所述第三保偏光纤被所述信号探测与处理模块探测,作为参考干涉信号;信号光的另一路光束经过所述光纤环形器和光纤准直器后出射至目标靶镜上,目标靶镜回光通过所述光纤准直器耦合进入光纤后经所述光纤环形器另一端出射,然后与本振光通过所述第二光纤耦合器合光干涉,通过所述第二光纤滤波器后通过第四保偏光纤被所述信号探测与处理模块探测,作为测量干涉信号。
16、进一步地,所述第一光纤滤波器和第二光纤滤波器的中心波长和带宽保持一致,其中,中心波长应近似等于所述双光梳光源的中心波长,带宽δvcomb应小于fr1fr2/2(δfr),以保证不发生双光梳频谱混叠现象,δfr为重频差。
17、进一步地,所述信号探测与处理模块探测带宽大于fr2,以满足奈奎斯特采样定理。
18、进一步地,光路的光纤长度要求为:
19、l5基本等于l6,使得光频梳引入的初相位相等且l3应大于l1+2l2+l4,其差值l3-(l1+2l2+l4)乘以光纤折射率应基本等于光纤入射端面到目标靶镜的初始距离l对应光程的两倍,其中,l1为第一光纤耦合器与光纤环形器之间的距离,l2为光纤环形器与光纤准直器之间的距离,l3为第一光纤分束器与第一光纤耦合器之间的距离,l4为光纤环形器与第二光纤耦合器之间的距离,l5为第一光纤耦合器与第二光纤分束器之间的距离,l6为第二光纤分束器到第二光纤耦合器之间的距离。
20、进一步地,光路的光纤长度要求采用以下任一形式进行实现,包括:
21、第一种形式:通过微调所述光纤准直器与目标靶镜的初始距离l,使得在初始状态下参考干涉信号和测量干涉信号时延基本为0;
22、第二种形式:在l1,l2,l3或者l4任意一段加入可调光纤延迟线,通过调节光纤延迟线的长度,满足初始状态下参考干涉信号和测量干涉信号时延基本为0。
23、进一步地,所述测距光路模块内还设置有热敏电阻,用于感知光纤光路的温度变化,通过电缆连接至所述信号探测与处理模块。
24、进一步地,确定光频梳的载波频率和载波相位差的方式,包括:
25、通过波长测量装置确定信号光通过光纤滤波器后的中心波长λc对应的频率作为载波频率值fc;
26、通过对采集到的参考干涉信号进行傅里叶变换得到子频率梳的幅频谱信息,以幅值最高点对应的频率值作为子频率梳的载波频率frf(c),以频率frf(c)对应的参考与测量干涉信号相位差作为光频梳载波频率fc对应的相位差
27、本发明由于采取以上技术方案,其具有以下特点:
28、1、本发明是基于重频锁定,偏频自由运行的双光梳光源实现的小动态范围高精度的测距方法,通过飞行时间法确定载波干涉相位的整数倍周期,通过稳定的载波相位差实现高精度绝对测距,通过双光梳组合测距方法实现距离高精度测量。
29、2、本发明通过全光纤测距光路,提升了双光梳测距光路的紧凑型和灵活性,通过对光纤长度的设计和两个探测器分别探测参考干涉信号和测量干涉信号的光路方式,使得在初始状态下参考干涉信号和测量干涉信号时延可以设置在0附近,保证频率噪声的积分时间最短,实现最大的动态测距范围和相位差的高稳定性输出。
30、3、本发明通过热敏电阻实时监测光路内部温度,补偿了由于参考与测量光路光纤长度不同对测距结果的影响,在此范围内获取高精度的绝对距离值。
31、4、本发明通过参考和测量干涉信号分开探测的方式,解决了参考和测量干涉信号在时域中重叠,导致无法测量的问题,消除了测距“盲区”。
32、综上,本发明简单实用,光源只需重频锁定,偏频可自由运行,通过采用全光纤光路形式控制频率噪声的积分时间,构建了无需噪声补偿的相位差稳定双光梳测距装置,适用于轴向测距范围较小的动态高精度测距应用,例如固定长度的卫星天线测量,振动测量等。
- 还没有人留言评论。精彩留言会获得点赞!