一种高精度无人机基准站定位方法与流程
本发明属于无人机,具体涉及一种高精度无人机基准站定位方法。
背景技术:
1、为了保证无人机能够沿特定航线飞行、飞往指定地点或前出侦察报告坐标等常规任务能够完成,都需要无人机能够准确定位自身的位置。现在的无人机定位系统主要有物理rtk(real-time kinematic,实时动态差分)和ppk(post processed kinematic,动态后处理)两种:
2、物理rtk系统是通过实时处理两个测量站载波相位观测量的差分方法来解算位置,系统由基准站(地面端)和流动站(天空端)组成,基准站将采集的载波相位发给用户接收机(流动站),进行求差解算坐标;
3、gps ppk是利用载波相位进行事后差分的gps定位技术。ppk技术的系统也是由基准站和流动站组成。ppk可记录卫星原始定位数据,并可以存event事件信息,用于后处理获取高精度定位信息。
4、以物理rtk方法举例,需要在同时基准站(地面端)和流动站(天空端)各部署一套rtk装置。由于无人机执行不同任务需求,无人机的地面端需要依据任务类型而布置,基准站由于易受到遮挡、强磁等恶劣环境影响,进而接收卫星导航定位信号不佳从而导致锁定星系较慢、定位收敛时间长且不准确;而每次外出执行任务都需要专业飞手对基准站进行配置,操作十分繁琐、不便。
5、另外,现有的物理rtk大都是使用硬件解算,解算手法单一且不易维护更新;大都使用不准确的预告星历;差分服务功能不够齐全。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种高精度无人机基准站定位方法,以解决现有的无人机定位问题。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种高精度无人机基准站定位方法,该方法包括如下步骤:
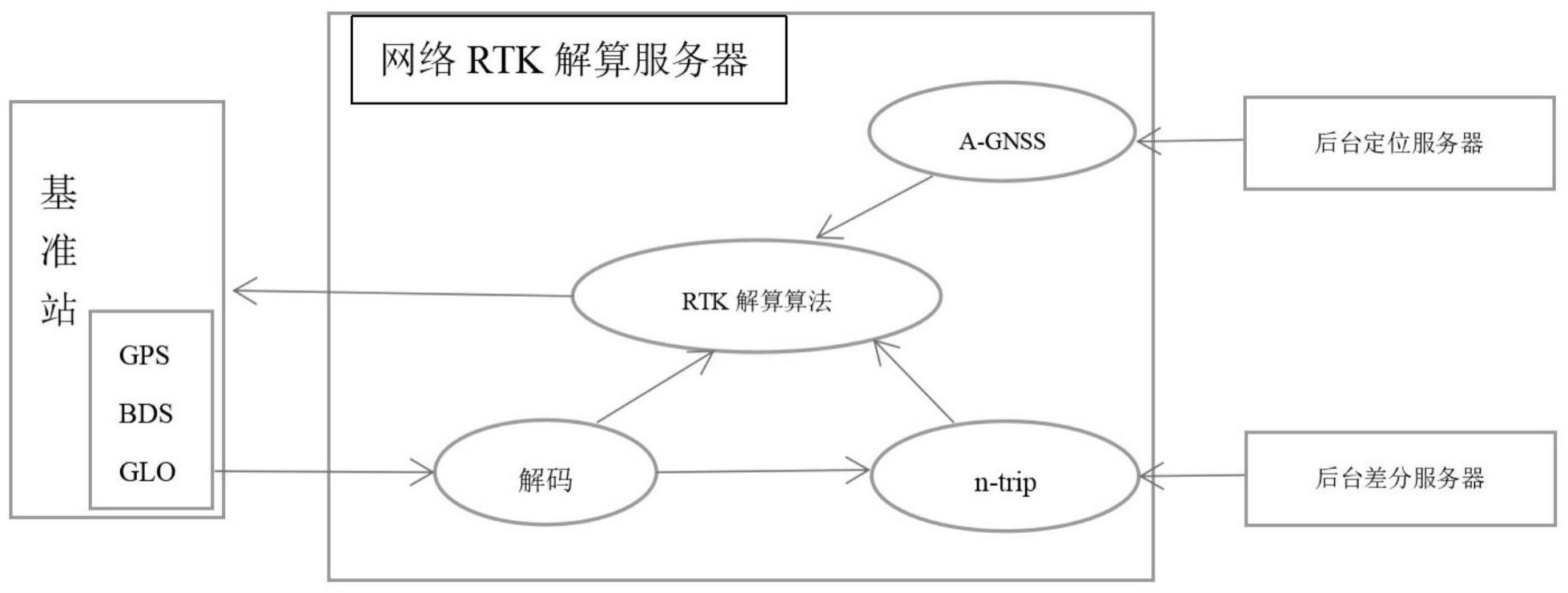
5、s11、网络rtk解算服务器在收到定位请求后,会同时与无人机基准站、后台差分服务器以及后台定位服务器进行通讯:
6、s12、从无人机基准站的硬件定位模块读取获取原始定位观测量并解码,同时通过ntrip协议从后台差分服务器获取本地区的差分数据,并从后台定位服务器上获取实时星历;
7、s13、待以上三方数据都已经获取到之后,网络rtk解算服务器会对差分数据、原始定位观测量和实时星历数据进行解析计算,判断解析出的信息是否稳定,如果稳定则进行解算调度,从而得到修正之后的卫星定位信息gga,连通差分数据发送到基准站供无人机定位定向使用。
8、进一步地,所述s12中,后台定位服务器为后台a-gnss定位服务器,实时星历为a-gnss实时星历。
9、进一步地,所述s13中,解析出的信息包括:时间戳、残差、卫星有效数和时钟信息。
10、进一步地,基准站使用单频或双频,且播发频率也能改变,支持fota(firmwareover-the-air)升级。
11、进一步地,无人机基准站的硬件定位模块包括:gps、bds和glonass。
12、本发明还提供一种高精度无人机基准站定位方法,该方法包括如下步骤:
13、s21、在基准站连接电源开始工作后,连接到一个可用的无线网络,待网络连接成功连接后即可登入后台网络rtk解算服务器;
14、s22、基准站连接网络rtk解算服务器后,向网络rtk解算服务器发起定位请求;
15、s23、网络rtk解算服务器在收到定位请求后会向基准站定位模块请求原始定位观测量数据,等待基准站定位模块完成自身位置获取,并且经过人为检查确认后,即将原始定位观测量数据回传给网络rtk解算服务器;同时,网络rtk解算服务器也从后台定位服务器以及后台差分服务器获取到本地区的实时星历和相关差分数据;
16、s23、当网络rtk解算服务器判断获取到的所有数据都不再有较大范围的跳变,即认为粗略定位的数据是稳定可用的,进行卫星定位信息gga数据的解算;
17、s24、然后,网络rtk解算服务器会将解算后的gga数据连同从差分服务器获取的差分数据发送至基准站供无人机使用。
18、进一步地,所述s21中,可用的无线网络是4g网络或者wifi网络。
19、进一步地,基准站定位模块为gps、bds或glonass。
20、进一步地,所述s23中,进行卫星定位信息gga数据的解算包括:
21、依据下式进行卫星定位信息gga数据的解算:
22、
23、从而得到更加精确的gga数据,式中,(x,y,z)t表示基准站最终的gga数据,(x0,y0,z0)t表示基准站本身获取的概略坐标,而(△x,△y,△z)t则是从后台差分服务器中得到的差分数据。
24、进一步地,所述s23还包括:
25、如果考虑到从网络rtk解算服务器与基准站数据传输以及解算时间引起的误差,则用以下公式校正:
26、
27、其中,t0表示基准站收到数据的时刻,t表示网络rtk解算服务器收到定位请求时的时刻。
28、(三)有益效果
29、本发明提出一种高精度无人机基准站定位方法,本发明所述的高精度无人机基准站(地面站)定位方法,设计科学合理,内部计算方法简便,易于实现,提高了无人机的飞行定位精确性,大大提高了无人机的安全行,也大幅度降低了无人机的整体系统复杂度。
技术特征:
1.一种高精度无人机基准站定位方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的高精度无人机基准站定位方法,其特征在于,所述s12中,后台定位服务器为后台a-gnss定位服务器,实时星历为a-gnss实时星历。
3.如权利要求1所述的高精度无人机基准站定位方法,其特征在于,所述s13中,解析出的信息包括:时间戳、残差、卫星有效数和时钟信息。
4.如权利要求1所述的高精度无人机基准站定位方法,其特征在于,基准站使用单频或双频,且播发频率也能改变,支持fota(firmware over-the-air)升级。
5.如权利要求1所述的高精度无人机基准站定位方法,其特征在于,无人机基准站的硬件定位模块包括:gps、bds和glonass。
6.一种高精度无人机基准站定位方法,其特征在于,该方法包括如下步骤:
7.如权利要求6所述的高精度无人机基准站定位方法,其特征在于,所述s21中,可用的无线网络是4g网络或者wifi网络。
8.如权利要求6所述的高精度无人机基准站定位方法,其特征在于,基准站定位模块为gps、bds或glonass。
9.如权利要求6-8任一项所述的高精度无人机基准站定位方法,其特征在于,所述s23中,进行卫星定位信息gga数据的解算包括:
10.如权利要求9所述的高精度无人机基准站定位方法,其特征在于,所述s23还包括:
技术总结
本发明涉及一种高精度无人机基准站定位方法,属于无人机技术领域。本发明网络RTK解算服务器在收到定位请求后,会同时与无人机基准站、后台差分服务器以及后台定位服务器进行通讯,获取始定位观测量、差分数据和实时星历,并进行解析计算,得到修正之后的卫星定位信息GGA,连通差分数据发送到基准站供无人机定位定向使用。本发明能提高了无人机的飞行定位精确性,大大提高了无人机的安全行,也大幅度降低了无人机的整体系统复杂度。
技术研发人员:唐堂,张俊安,张锋,李恒,吴荦,赵毅,姜大勇,许峻峰,逄金龙,朱建莹,韩慧君
受保护的技术使用者:中国北方工业有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!