一种测量三相电机停车制动角位移的方法与流程
本发明涉及角位移测量,具体涉及一种测量三相电机停车制动角位移的方法。
背景技术:
1、三相电机停车后,因为负载惯性,会在电源切断后,电机仍然沿既有方向旋转。在很多场合,这会造成一些不期望出现的后果。比如车辆刹车距离过长、起重机吊具在制动时发生了溜钩等极端的情形,会造成安全事故。所以,需要一种能够检测或实时监测从电机制动到停车完成的角位移,最终换算出设备从电机制动到最终停转,所发生的线位移的方法。
2、目前,常见的方法是会直接对线位移或者角位移本身进行测量。采样直接测量,问题在于事件沿的捕获和相应物理量本身的测量,都无法达到很高的精度。
3、如果关注刹车片磨损或者其他制动器具的疲劳度。这种测量手段,可以将结果直接反馈给用户和相关监管机构,提醒评估设备及相关零部件的疲劳程度,以便于有针对性地进行处理,比如采取中修、大修程序,或者仅仅是委派技术人员进行刹车系统调校。
技术实现思路
1、为了解决接对线位移或者角位移本身进行测量时,关于事件沿的捕获和相应物理量本身的测量的精度均较低的技术问题,本发明的目的在于提供一种测量三相电机停车制动角位移的方法,所采用的技术方案具体如下:
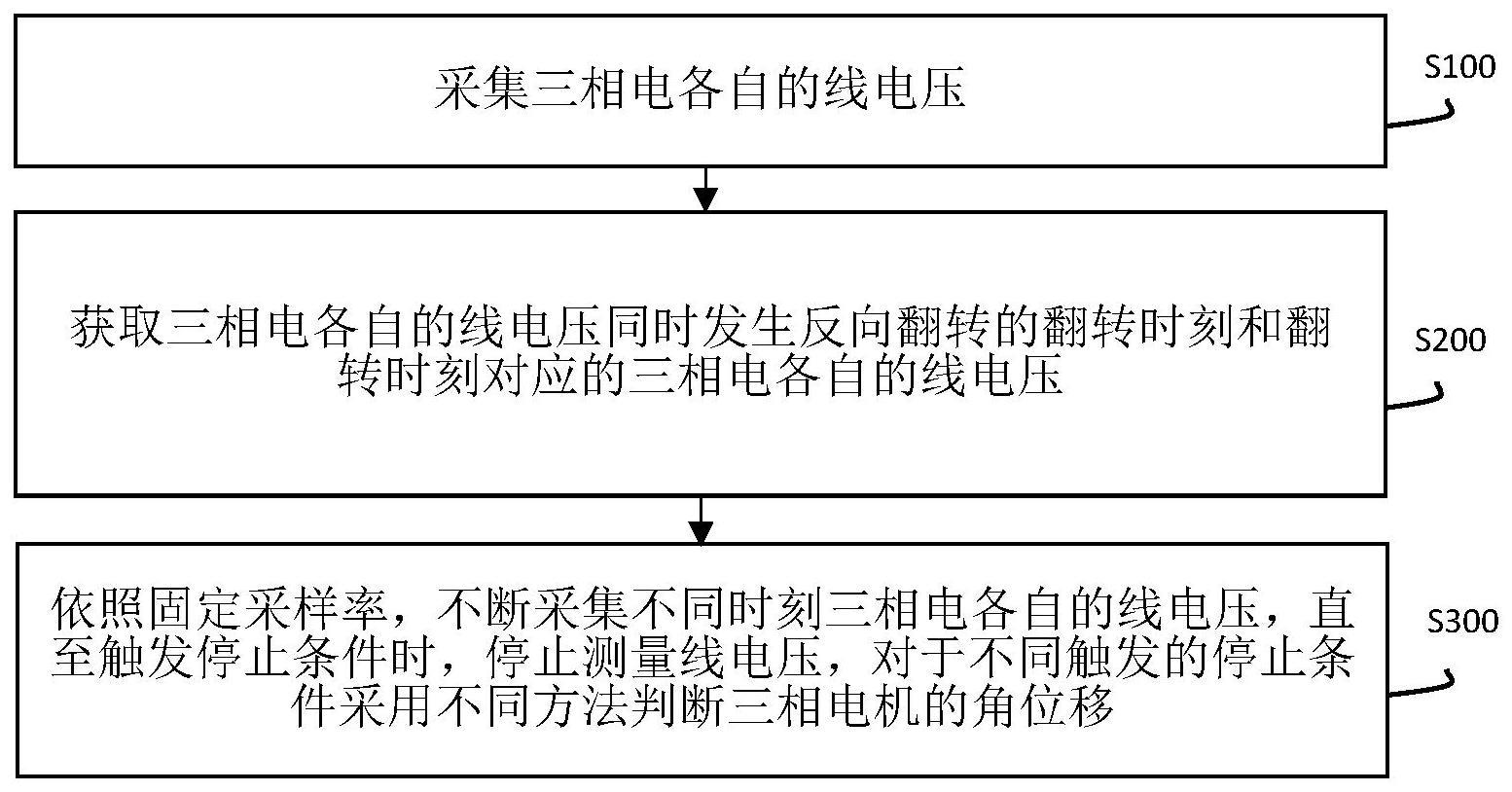
2、采集三相电各自的线电压;
3、获取三相电各自的线电压同时发生反向翻转的翻转时刻和翻转时刻对应的三相电各自的线电压;
4、依照固定采样率,不断采集不同时刻三相电各自的线电压,直至触发停止条件时,停止测量线电压,对于不同触发的停止条件采用不同方法判断三相电机的角位移;
5、其中,当触发的停止条件为三相电的所有线电压均小于预设电压阈值时,根据开始采集时和最后采集时的相邻时刻的三相电各自的线电压矢量和的幅角,确定从制动到停车的角位移。
6、优选的,所述触发停止条件,包括:
7、当最后采集时刻与最初采集时刻的差值大于预设时间阈值时,则停止测量线电压;
8、当三相电各自的线电压在此发生相位反转时,则停止测量线电压;
9、当三相电所有的线电压均小于预设电压阈值时,则停止测量线电压。
10、优选的,所述对于不同触发的停止条件采用不同方法判断三相电机的角位移,包括:
11、当最后采集时刻与最初采集时刻的差值大于预设时间阈值时,判定三相电机的角位移为无穷大;
12、当三相电各自的线电压在此发生相位反转时,输出故障提示;
13、当三相电所有的线电压均小于预设电压阈值时,根据开始采集时和最后采集时的相邻时刻的三相电各自的线电压矢量和的幅角,确定角位移。
14、优选的,所述根据开始采集时和最后采集时的相邻时刻的三相电各自的线电压矢量和的幅角,确定从制动到停车的角位移,包括:
15、获取最后三次采集得到的三组线电压中两两相邻的三相电各自的线电压的差值组;
16、获取最开始采集时的前三次采集得到的三组线电压中两两相邻的三相电各自的线电压的差值组;
17、计算最开始采集时的前三次采集对应的差值组内线电压的电压和矢量,并计算电压和矢量对应的幅角;计算最后三次采集对应的差值组内线电压的电压和矢量,并计算该电压和矢量对应的幅角;
18、根据电压和矢量对应的幅角确定三相电机的角位移。
19、优选的,所述根据电压和矢量对应的幅角确定三相电机的角位移,包括:
20、θ=[(360*countcycle)+(θend-θstart)]/n
21、其中,θ为三相电机的角位移;θend为最后一次的三相电各自的线电压的电压和矢量对应的幅角;θstart为最开始一次的三相电各自的线电压的电压和矢量对应的幅角;n为电机极对数;countcycle为周期计数值。
22、优选的,所述周期计数值的获取方法为:
23、在持续测量三相电各自的线电压的跟踪测量过程中,记起始时刻时三相电的各自线电压的测量值为各自的相位零点,进行周期计数,当有过相位零点的事件发生时,对周期计数值加1,其中,在起始时刻周期计数值为0。
24、本发明实施例至少具有如下有益效果:
25、本发明针对电源输入线电压或者线电流直接测量;转速本身因为极对数的因素,一定低于电源震荡频率。掉电事件,最早也反映在相电压和相电流上,所以,可以通过最高频率和停车事件发生的源头,来进行采集测量,这种测量也不需要额外安装其他的传感设备。无传感设备的安装、维护、校准的额外开销,也没有长时间运行而导致出现累计误差以及可能失效的隐患,提高了关于事件沿的捕获和相应物理量本身的测量的精度。
技术特征:
1.一种测量三相电机停车制动角位移的方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种测量三相电机停车制动角位移的方法,其特征在于,所述触发停止条件,包括:
3.根据权利要求2所述的一种测量三相电机停车制动角位移的方法,其特征在于,所述对于不同触发的停止条件采用不同方法判断三相电机的角位移,包括:
4.根据权利要求1所述的一种测量三相电机停车制动角位移的方法,其特征在于,所述根据开始采集时和最后采集时的相邻时刻的三相电各自的线电压矢量和的幅角,确定从制动到停车的角位移,包括:
5.根据权利要求4所述的一种测量三相电机停车制动角位移的方法,其特征在于,所述根据电压和矢量对应的幅角确定三相电机的角位移,包括:
6.根据权利要求5所述的一种测量三相电机停车制动角位移的方法,其特征在于,所述周期计数值的获取方法为:
技术总结
本发明涉及角位移测量技术领域,具体涉及一种测量三相电机停车制动角位移的方法。该方法首先采集三相电各自的线电压;获取三相电各自的线电压同时发生反向翻转的翻转时刻和翻转时刻对应的三相电各自的线电压;依照固定采样率,不断采集不同时刻三相电各自的线电压,直至触发停止条件时,停止测量线电压,对于不同触发的停止条件采用不同方法判断三相电机的角位移。本发明提高了关于事件沿的捕获和相应物理量本身的测量的精度。
技术研发人员:张运良,武欢欢,冯旭辉,席军辉
受保护的技术使用者:郑州恺德尔科技发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!