一种基于UWB技术的仪表自定位方法与系统与流程
本发明涉及仪表自定位,具体提供一种基于uwb技术的仪表自定位方法与系统。
背景技术:
1、为了保证煤矿日常生产安全,需要在井下巷道中安装各种传感器用于实时监测各种环境数据,包括应力数据,并严格要求传感器安装的位置。由于传感器安装数量庞大,并且传感器的位置会随着生产过程而变动,如果采用人工标定位置的方式,一是工作量大,二是容易出现纰漏。
2、如果传感器设备能够自动标定自己的位置,对客户来说是十分有价值的。
3、传统的uwb测距需要两种设备类型,一种是uwb标识卡设备:主动向周围发送测距信号;uwb基站设备:被动接收标识卡发送的测距信号,并根据相应算法计算出基站设备与标识卡设备之间的距离。
技术实现思路
1、本发明的技术任务是针对上述存在的问题,提供一种基于uwb技术的仪表自定位方法与系统,无需额外安装uwb基站设备,系统成本低,部署难度小。
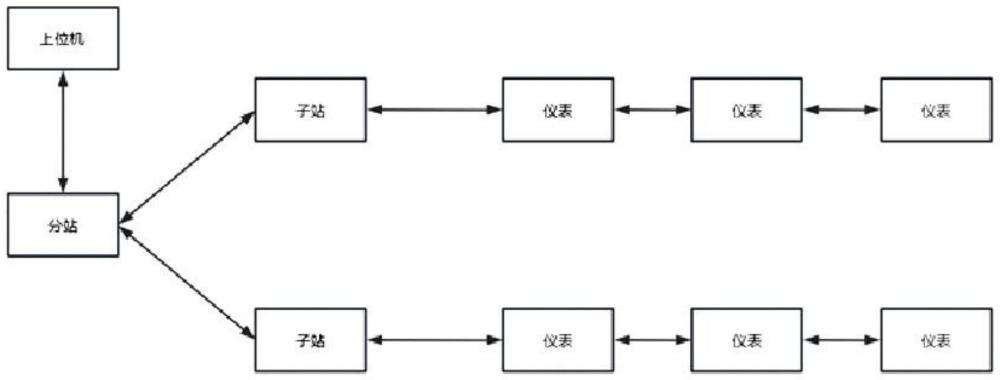
2、本发明技术方案,一种基于uwb技术的仪表自定位系统,所述系统的构成包括:
3、上位机:负责接收和处理所有仪表的距离信息,并计算出所有仪表设备的位置信息;
4、uwb模组;使用1ghz以上频率带宽的无线载波通信技术,用于测距;
5、分站:负责接收和汇总所有子站的数据,并传输到上位机;
6、仪表:安装在井下巷道中的监测点,用于采集巷道的环境数据,例如应力数据,其中集成uwb模组;
7、子站:集成uwb模组,负责接收和汇总所有仪表的数据,并传输到分站。
8、更进一步的,所述uwb模组的工作模式包括:
9、tag模式(基站模式):所述仪表中的uwb模组处于tag模式时会主动发送测距信号;
10、anc模式(标识卡模式):所述仪表中的uwb模组处于anc模式时会被动接收其他仪表发送的测距信号。
11、本发明另一方面提供一种基于uwb技术的仪表自定位方法,所述方法的实现过程如下:
12、将uwb模组安装于仪表中,将所述uwb模组的工作模式在tag模式和anc模式之间切换,实现系统中每一个仪表按照顺序依次自动发送测距信号,以获取与周围其他的一个或者多个仪表之间的距离信息,所述上位机根据上述距离信息,分析出每一个仪表与子站之间的距离信息,从而确定每个仪表的位置。
13、更进一步的,所述uwb模组为融合型uwb模组,包括tag模组和anc模组(uwb标识卡设备和uwb基站设备);
14、所述uwb测距模组的工作模式包括tag模式和anc模式。
15、更进一步的,所述方法的实现过程包括:
16、所述uwb模组初次上电运行时处于无模式状态,由外部指令控制其运行于tag模式或者anc模式;
17、所述tag模组向anc模组发起测距流程,所述anc模组接收到测距信号后经过计算获得与tag模组之间的直线距离,并将距离数据封装成协议通过串口发送给仪表主控电路(外部电路);
18、所述tag模组在完成距离探测后会自动切换成anc模式,此时所述仪表可作为基站供其他tag模式的仪表进行测距工作;
19、所述uwb模组测距成功后,主动向所述仪表主电路发送距离数据,所述仪表主电路接收到距离数据后,再转发给所述子站。
20、更进一步的,所述tag模组将所述距离信息存储到uwb模组的存储电路中留作备份;当仪表主控电路发送指令索要距离信息时,uwb模组将存储在本地的距离信息取出发送给仪表主控电路。
21、更进一步的,所述anc模组通过开启一个定时器,从开始运行开始或者从上一次接收到探测信号开始计数,如果在指定的时间长度之内没有接收到任何探测信号,则向仪表主控电路(外部电路)发送断电申请指令,控制仪表的总体功耗,避免因为uwb模组的集成而造成功耗的大幅增加的情况。
22、更进一步的,所述子站集成uwb模组,通过电源供电,所述子站上电工作后,会立刻给uwb模组供电,并将其设置为anc模式,附近处于tag模式的仪表会对其进行测距工作;所述子站在接收到仪表上传的距离数据后,进行汇总后转发给分站。
23、更进一步的,所述仪表集成uwb模组,采用电池供电,因此通常状态下,仪表中主电路是不给测距模组供电的,只有接收到子站发送的相关指令后,给所述uwb模组供电,所述uwb模组上电工作后,所述仪表主电路向其发送相关指令使其工作在tag模式,开始进行测距工作;
24、此时,仪表主电路开始计时,到达指定的时间后,不管有没有完成测距工作,都将其断电以此来控制设备的总体功耗。
25、所述分站设备下可挂载多台子站设备,其接收和汇总子站设备发送的距离数据,然后上传至服务器上位机。
26、更进一步的,所述子站作为定位的锚点设备,其位置信息是已知的,所述仪表的位置坐标以子站设备的位置为原点并根据距离数据计算出来。
27、与现有技术相比,本发明一种基于uwb技术的仪表自定位方法与系统具有以下突出的有益效果:
28、本发明仪表设备位置变动后,系统可自动进行坐标标定,整个过程无需人工接入,自动化程度高,并且uwb测距达到厘米级别,定位较为精确,尤其是在仪表数量比较庞大的时候,位置标定的时间相比人工标定更加迅速,效率更高,出错概率更小。相比其他设备定位相比,本方案最大的优势是无需额外安装uwb基站设备,系统成本低,部署难度小。
技术特征:
1.一种基于uwb技术的仪表自定位系统,其特征在于,所述系统的构成包括:
2.根据权利要求1所述的一种基于uwb技术的仪表自定位系统,其特征在于,所述uwb模组的工作模式包括:
3.一种基于uwb技术的仪表自定位方法,其特征在于,所述方法的实现过程如下:
4.根据权利要求3所述的一种基于uwb技术的仪表自定位方法,其特征在于,所述uwb模组为融合型uwb模组,包括tag模组和anc模组;
5.根据权利要求2所述的一种基于uwb技术的仪表自定位方法,其特征在于,所述方法的实现过程包括:
6.根据权利要求5所述的一种基于uwb技术的仪表自定位方法,其特征在于,所述tag模组将所述距离信息存储到uwb模组的存储电路中留作备份;当仪表主控电路发送指令索要距离信息时,uwb模组将存储在本地的距离信息取出发送给仪表主控电路。
7.根据权利要求3-6任一所述的一种基于uwb技术的仪表自定位方法,其特征在于,
8.根据权利要求7所述的一种基于uwb技术的仪表自定位方法,其特征在于,所述子站集成uwb模组,通过电源供电,所述子站上电工作后,会立刻给uwb模组供电,并将其设置为anc模式,附近处于tag模式的仪表会对其进行测距工作;所述子站在接收到仪表上传的距离数据后,进行汇总后转发给分站。
9.根据权利要求8所述的一种基于uwb技术的仪表自定位方法,其特征在于,所述仪表集成uwb模组,采用电池供电,在接收到子站发送的相关指令后,给所述uwb模组供电,所述uwb模组上电工作后,所述仪表主电路向其发送相关指令使其工作在tag模式,开始进行测距工作;
10.根据权利要求9所述的一种基于uwb技术的仪表自定位方法法,其特征在于,所述子站作为定位的锚点设备,其位置信息是已知的,所述仪表的位置坐标以子站设备的位置为原点并根据距离数据计算出来。
技术总结
本发明提供了一种基于UWB技术的仪表自定位方法与系统,所述系统的构成包括上位机:负责接收和处理所有仪表的距离信息,并计算出所有仪表设备的位置信息;UWB模组,用于测距;分站:负责接收和汇总所有子站的数据,并传输到上位机;仪表:集成所述UWB模组,安装在监测点,用于采集环境数据;子站:集成所述UWB模组,负责接收和汇总所有仪表的数据,并传输到分站。本发明仪表设备位置变动后,系统可自动进行坐标标定,整个过程无需人工接入,自动化程度高,并且UWB测距达到厘米级别,定位较为精确,尤其是在仪表数量比较庞大的时候,位置标定的时间相比人工标定更加迅速,效率更高,出错概率更小。
技术研发人员:张帅,李阿涛,王源,唐玉银,邢延晨
受保护的技术使用者:山东科岳科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!