一种基于多光谱和点云数据处理的矿区生物量监测方法
本发明提供一种基于多光谱和点云数据处理的矿区生物量监测方法,属于矿区生物量监测。
背景技术:
1、目前针对矿山的生态修复主要是为了保护生态环境、维护生物多样性、改善地质环境稳定性,为社会经济发展提供良好的生态基础,其中对矿区植被生物量进行准确监测是进行生态修复的一项重要工作,可为矿区生态修复及其碳汇贡献估算提供重要的数据依据。
2、然而目前使用的生物量统计方法以实测数据为基础,需要投入大量人力、物力、财力,而且需要较长的时间周期才能统计完成,采集单一的监测数据源在监测精度上存在缺陷,使用无人机lidar在郁闭度高的林分中难以获取林下信息,地面激光雷达扫描效率低,且难以获取树木冠层信息,进而影响大范围生物量监测精度;
3、同时,针对目前生物量模型反演构建多以树木垂直结构特征为模型参数,缺乏引入反映树木光谱特征的波段因子、植被指数、纹理因子,从而影响生物量反演模型精度;
4、此外,目前使用的遥感光学监测手段,对于大范围生物量树种识别的准确度低;目前获取树木光谱信息一般采用机载或卫星传感器,其在获取影像时空间分辨率较低,在影像中收集训练样本数据波谱时存在一定的困难,或者是采集波谱曲线时,单单只是采集了波谱,没有赋予平面位置;同时在对研究区进行多光谱识别树种时,研究区内同一树种,由于树种密度、年龄、阴影等差异及不同树种由于周边环境的因素影响,训练样本的选择以及数量也会对树种的分类产生一定的影响,对于树种的分类准确度有一定影响。
技术实现思路
1、本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种基于多光谱和点云数据处理的矿区生物量监测方法。
2、为了解决上述技术问题,本发明采用的技术方案为:一种基于多光谱和点云数据处理的矿区生物量监测方法,包括如下的监测步骤:
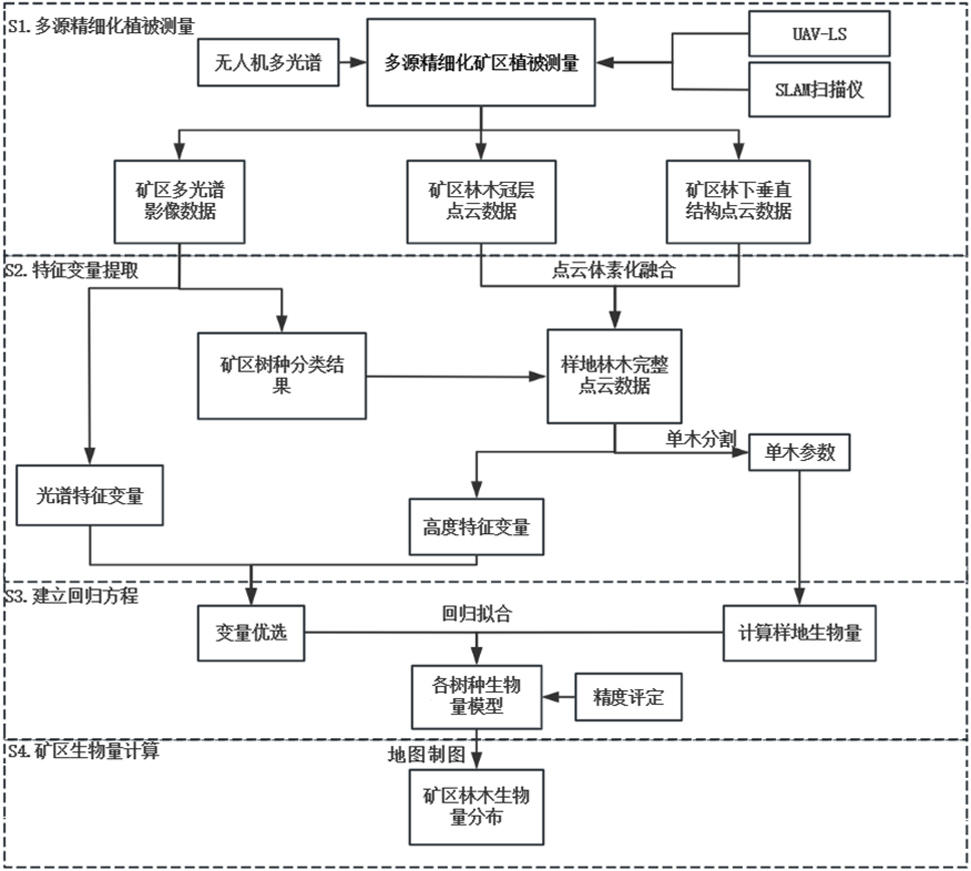
3、步骤s1:控制搭载有多光谱传感器和坐标定位模块的无人机,基于差分定位原则采集矿区植被多光谱的原始数据;
4、控制slam手持激光扫描仪,按照规划的行进路线对矿区所分样地林下垂直结构信息进行数据采集;
5、步骤s2:结合无人机飞行所获得流动站数据、lidar原始数据、载荷imu文件,运行无人机内嵌的点云解算程序,依次解算点云轨迹、解算点云、质量检查、特征提取后航带平差、去冗余、坐标转换、精度检查、去噪,最后得出标准格式的点云数据;
6、控制slam手持激光扫描仪对采集数据进行拼接、去噪操作后,产出含样地林下垂直结构信息的标准格式点云数据;
7、采用体素化点云数据融合方式,融合uav-ls数据和slam扫描仪获取的点云数据,得到含样地林下垂直结构信息的完整点云数据;
8、步骤s3:提取高度特征变量:
9、采用uav-ls和slam融合后的点云数据,对点云数据进行去噪、地面点分类、归一化的预处理后,通过对点云数据的单木分割获取树木的x、y坐标位置、树高、胸径、冠幅直径、冠幅面积、冠幅体积属性;
10、提取光谱特征变量:
11、基于矿区多光谱影像提取反映矿区树木光谱特征的变量因子,包括植被指数和纹理因子;
12、其中,提取的植被指数包括:归一化植被指数、差值植被指数、比值植被指数、增强植被指数、有效叶面积指数;
13、提取的纹理因子包括:均值、方差、对比度、信息熵、协同性、相异性、二阶矩、相关性;
14、步骤s4:将点云数据按照各树种筛选出来并进行各树种单木生物量计算,结合回归分析方法筛选矿区点云数据单木分割得出的冠径、冠幅、树冠体积;
15、选取矿区多光谱影像提取的单波段因子、主成分分析因子、纹理因子特征变量为自变量,选取样地生物量为因变量,分别进行拟合构建矿区树种生物量模型并对模型进行精度评价;
16、使用矿区生物量反演模型计算矿区整体生物量,通过地图制图手段反映矿区生物量分布状况。
17、所述步骤s2中对数据处理与融合得到完整点云数据的具体方法为:
18、步骤s2.1:进行点云去噪:
19、设定标准差倍数为meank,算法对每一个点搜索指定邻域点个数的相邻点,计算点到相邻点的距离平均值d,计算这些平均值距离的中值meand和标准差s,如果d值大于最大距离maxd(maxd=meand+meank*s),则判断为噪点,进行删除;
20、步骤s2.2:进行点云滤波:
21、对地面点进行分类,采用渐进加密三角网滤波算法分类地面点,通过种子点生成一个稀疏的三角网,然后通过迭代处理逐层加密,直到所有地面点分类结束;
22、步骤s2.3:进行体素化融合:
23、将点云空间划分为离散的体素网格,采用octree数据结构存储体素网格,执行体素滤波得到滤波后的融合点云。
24、所述步骤s3中提取高度特征变量的具体方法为:
25、步骤s3.1:针对dem的范围与点云数据的范围有交集区域,对于每一个点的高程值z减去找到的对应dem高程值,采用归一化工具去除地形起伏对点云数据高程值的影响;
26、步骤s3.2:基于chm对单木进行分割:建立二维规则格网,将点云投影到格网中,格网值为内部点云的最低点高程,格网中无点时,进行插值,将邻近格网值赋予该无点格网,得到dem,同理将最低点高程改为最高点高程得到dsm,二者做差得到chm;
27、chm分割使用分水岭分割算法识别和分割单棵树,获取单木位置、树高、冠幅直径、冠幅面积与树木边界;
28、步骤s3.3:基于点云对单木进行分割:从种子点a开始,根据间距临界值和最小间距规则,通过对更低的点进行估计,将种子点a发展为一个树聚类。
29、所述步骤s4中计算矿区整体生物量的具体方法为:
30、步骤s4.1:计算矿区的生物量包括:
31、针对某地煤矿,树种各部分计算生物量模型如下:
32、针对树干生物量计算公式为:ws=a(d2h)b;
33、针对树枝生物量计算公式为:wb=c(d2h)d;
34、针对树叶生物量计算公式为:wl=e(d2h)f;
35、针对地上部分总生物量计算公式为:wt=ws+wb+wl;
36、针对地下部分生物量计算公式为:wr=g(d2h)h;
37、针对生物量的计算公式为:w=wt+wr,式中a、b、c、d、e、f、g、h为模型参数,d为胸径,h为树高;
38、步骤s4.2:构建矿区生物量计算模型:
39、以矿区点云数据单木分割得出的冠径、冠幅、树冠体积,矿区多光谱影像提取的植被指数、纹理因子为自变量,样地生物量为因变量进行变量筛选,筛选指标为vip,将筛选的特征组合分别进行拟合以构建矿区树种的生物量模型;
40、筛选指标vip用来判断单个自变量在解释因变量的重要性,计算公式为:
41、
42、式中:k为自变量个数,ch为相关自变量提取的主成分,r(y,ch)为因变量和主成分的相关系数,表示主成分对y的解释能力,whj为自变量在主成分上的权重;
43、模型构建方式以线性回归、乘幂回归、多项式回归、对数回归、指数回归、线性多元回归进行,模型精度评价采用决定系数r2和均方根误差rmse来检验,评价的计算公式为:
44、
45、
46、式中:yi代表实测生物量;代表实测生物量均值;n为样本量。
47、本发明相对于现有技术具备的有益效果为:本发明具体联合具备多光谱检测功能的无人机、uav-ls、slam扫描仪完成对矿区植被的整体观测,其中uav-ls仅能够获取矿区林木冠层结构的数据,slam手持扫描仪主要获取林下垂直结构信息数据,多光谱主要收集矿区植被光谱信息,构成了多源精细化矿区生物量监测系统,联合三套数据可以实现对矿区植被生物量的准确计算;本发明采用slam手持激光扫描仪相较架站式地面激光扫描仪采集效率更高,相比于车载lidar采集,线路更加灵活,其可较完整获取树木点云的同时,林下可以借助林外控制点定位;此外本发明将多源密度不同的点云数据转化为体素网格表示,并进行融合处理,能够完成多源数据的无缝融合,有效提升对生物量监测的精度和准确率。
- 还没有人留言评论。精彩留言会获得点赞!