基于三角形阵列成像仪的水平井油水两相流量计算方法
本发明属于石油开发动态监测领域,具体涉及一种基于三角形阵列成像仪的水平井油水两相流量计算方法。
背景技术:
1、水平井、多级射孔已成为开发页岩油、致密油等油藏的主流技术之一。实际水平井井筒中的油水两相流动是一种变井身轨迹(井斜)、变油相水相流量、变含水率的复杂管流。在每个射孔层或产出层附近,油相和水相的流动参数(油水分布状态、局部流体速度和局部持水率)都会发生剧烈变化。为了准确动态测试井下真实产出位置、产出流体类型和各相流量大小,国内普遍采用阵列环形探针(电容、电阻和涡轮)进行覆盖全井眼测量,由于在井筒中心附近缺少测量探针,因此具有一定的测量盲区,尤其是缺少井筒中心附近的流速测量。
技术实现思路
1、本发明的目的是针对上述存在的问题,提出了一种采用三角形阵列成像仪精确测量井筒横截面上不同位置处的局部流体涡轮转动速度和局部流体电阻探针响应信息,结合探针位置、测量原理,准确反演计算局部流体速度、局部持水率,进而得出各射孔层或产出层的油相产量和水相产量,实现全井段产出剖面的连续监测的水平井油水两相流量计算方法。
2、本发明具体采用如下技术方案:
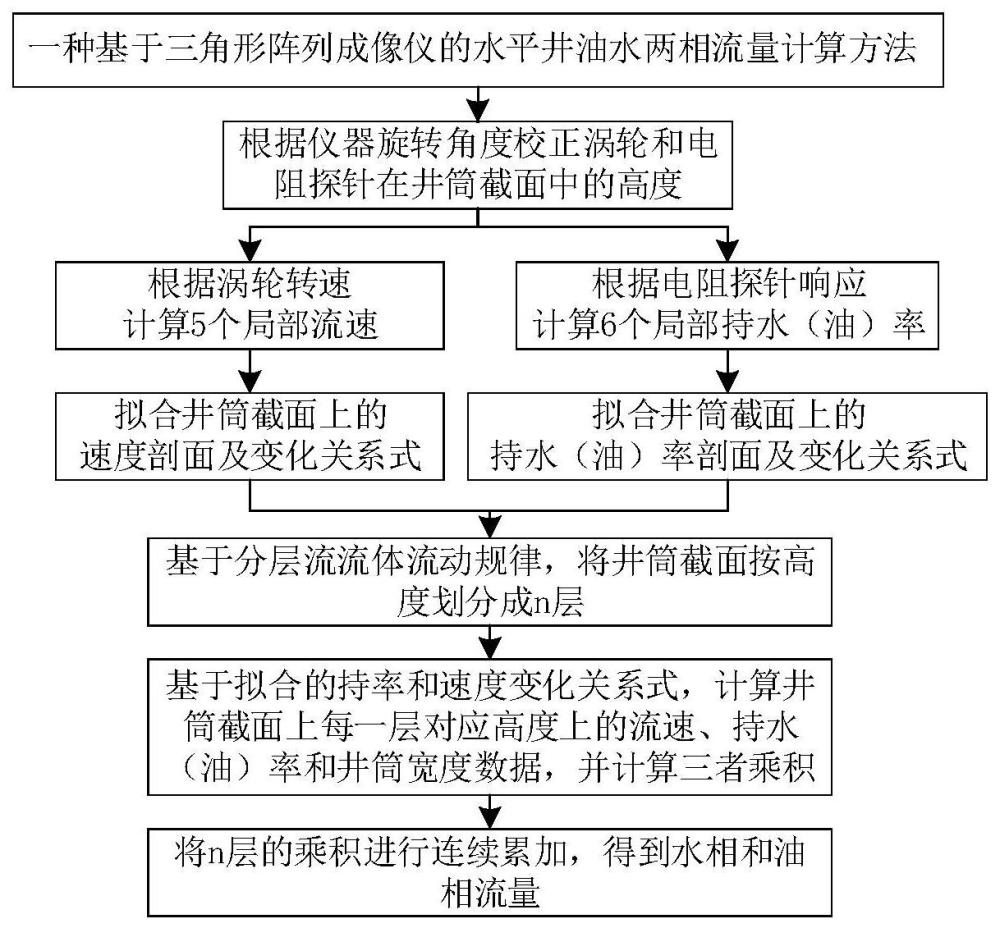
3、基于三角形阵列成像仪的水平井油水两相流量计算方法,采用的三角形阵列成像仪包括5个微型涡轮和6个电阻探针,包括以下步骤:
4、步骤1:根据三角形阵列成像仪旋转角度进行涡轮和电阻探针高度校正,得到微型涡轮和电阻探针在井筒横截面中的高度;
5、步骤2:计算各微型涡轮对应的局部流速,并拟合出速度剖面和变化关系式;
6、步骤3:计算各电阻探针对应的局部持水/油率,并拟合出持水/油率剖面和变化关系式;
7、步骤4:基于水平井油水分层流动规律,将井筒横截面按高度划分成n层,计算井筒横截面上每一层的流速、持水/油率和井筒横截面宽度,及三者的乘积;
8、步骤5:将n层上的乘积数值进行连续累加,得到水相和油相流量。
9、优选地,步骤1中,当三角形阵列成像仪未发生偏转,各微型涡轮和电阻探针沿井筒横截面的中心垂线分布,并具有基于仪器设计参数获得的固定高度;实际测量过程中,受三角形阵列成像仪拖动和流体扰动因素影响,主体会基于底部发生左右旋转,旋转角度记为θ;
10、当三角形阵列成像仪主体向右旋转角度θ后,各微型涡轮在井筒横截面上的高度计算方法如下:
11、h′i=hi×cosθ (1)
12、式中,h′i为第i个涡轮在仪器旋转后的高度,单位为m,hi为仪器不发生旋转时,第i个涡轮的原始高度,单位微m,θ为仪器的旋转角度,i=0~4;
13、同理,当三角形阵列成像仪发生旋转时,各电阻探针在井筒横截面上的高度计算方法如下:
14、h′j=hj×cosθ (2)
15、式中,h′j为第j个电阻探针在仪器旋转后的高度,单位m,hj为仪器不发生旋转时,第j个电阻探针的原始高度,单位m,θ为仪器的旋转角度,j=0~5。
16、优选地,基于三角形阵列成像仪的水平井油水两相流量计算方法,其特征在于,步骤2中,由各微型涡轮的转动速度计算局部流速,计算公式如下:
17、vi=αi*flowi-speed-vti (3)
18、式中,vi表示第i个涡轮处的局部流速,单位微m/min;αi表示第i个涡轮线性响应关系的斜率,分析实验数据可获得,无量纲;flowi表示第i个涡轮的转动速度,单位微rps;speed表示电缆速度,单位为m/min;vti表示第i个涡轮的启动速度,即克服涡轮转动摩擦所需要的最小流体流动速度,单位微m/min,i=0-4;
19、根据5个微型涡轮高度和计算出的局部流速,通过对比幂函数拟合和指数拟合方法,最终采用10阶多项式拟合得到符合理论规律的速度剖面,并得到拟合公式v(h),即局部流速v和井筒高度h之间的变化关系式,其中,井筒壁上流体受摩擦力影响,速度为0,基于有限的涡轮数据,通过选取合适的拟合方法,拟合得到各涡轮之间的流体速度数据。
20、优选地,步骤3中,由各电阻探针的响应值计算局部持水率,计算公式如下:
21、
22、yoj=1-ywi (5)
23、式中,ywj为第j个电阻探针高度上的持水率,无量纲;yoj为第j个电阻探针高度上的持油率,无量纲;ratj为第j个电阻探针的响应,无量纲;ratw为纯水中电阻探针的响应,无量纲;rato为纯油中电阻探针的响应,无量纲,j=0-5;
24、根据6个电阻探针高度和计算出的局部持水/油率,通过对比幂函数拟合和指数拟合等方法,最终采用10阶多项式拟合得到符合理论规律的持率剖面,并得到拟合公式yw(h)或yo(h),即局部持水率yw或局部持油率yo和井筒高度h之间的变化关系式,基于有限的电阻探针数据,通过选取合适的拟合方法,拟合得到各探针之间的持率数据。
25、优选地,步骤4中,由于水平井中的油水两相受重力影响上下分层,且具有较明显的边界,流型为分层流,近似认为井筒横截面上同一高度的流体性质和流体速度相同,基于该流动规律,将井筒横截面,沿高度划分为n个小层;
26、小层对应的高度h发生变化时,其对应的井筒横截面宽度也会发生变化,变化关系式为式(6):
27、
28、式中,h为在井筒横截面中的高度,单位为m,l(h)为在高度h上的井筒横截面宽度,单位m,d为井筒直径,单位m;
29、依据速度剖面和持率剖面的拟合关系式,以及井筒横截面宽度的变化关系式,得到井筒横截面上划分的每个层对应高度上的流体速度、持水/油率和井筒横截面宽度,每个层上的流速v、持水(油)率yw(yo)数据和井筒横截面宽度l乘积的结果即为该层的水相/油相流量,计算公式如下:
30、qw(h)=yw(h)*v(h)*l(h) (7)
31、qo(h)=yo(h)*v(h)*l(h) (8)
32、式中,qw(h)和qo(h)为井筒横截面上高度h处的水相流量和油相流量,m3/d;yw(h)和yo(h)为井筒横截面上高度h处的持水率和持油率,无量纲;v(h)为井筒横截面上高度h处的流体速度,单位为m/min;l(h)为井筒横截面上高度h处的井筒横截面宽度,单位为m。
33、优选地,步骤5中,
34、对n个层的水相流量和油相流量进行连续求和,可得井筒中的总水相流量和油相流量,计算公式如下:
35、
36、
37、式中,qw和qo为井筒中的水相流量和油相流量,m3/d。
38、本发明具有如下有益效果:
39、本方案针对水平井井筒中的油水两相呈现分层流的现象,采用三角形阵列成像仪(阵列涡轮和阵列电阻探针)解决了传统环形阵列探针、在井筒中心附近处、流体信息测量存在盲区的问题,提升了井筒横截面上局部流体信息的测量品质。基于流体力学流动规律和油水在井筒中连续分布的特征,利用局部流体的反演信息和数学思维,拟合得出油水的速度剖面、持率剖面及变化关系式,再采用积分累加的方法,更加符合实际的物理现象,能更精确的反演水平井油水两相的局部速度和局部持率信息,提高了油相和水相的流量计算精度,更好的服务于页岩油、致密油等油藏的水平井油水两相产出剖面的连续动态监测。
- 还没有人留言评论。精彩留言会获得点赞!