串联电池组的基于多模型融合的多状态联合估计方法
本发明涉及电池,具体涉及一种串联电池组的基于多模型融合的多状态联合估计方法。
背景技术:
1、无人自主水下航行器(auv,autonomousunder-watervehicle)作为一种具备侦察、探测等多种功能的水下无人自主系统,是维护国家海洋安全的核心支撑,在我国东南海域等深远海战略发展中扮演着重要角色。能源技术作为auv发展的关键性技术,一直是auv续航里程和执行任务能力提升的重要保障,是实现auv“下得去、待得住”的核心。电动力水下航行器的结构和性能等方面较热动力水下航行器有很大优势,因此动力电池的研究对于水下航行器的发展应用非常关键。锂离子电池相比于其它二次电池,能量密度大、工作电压高、自放电率低、使用维护方便并且无记忆效应,具有其他二次电池无法比拟的优点,因此目前绝大多数电动力水下航行器都采用锂离子电池作为其动力能源装置。
2、水下航行器对电池的容量和性能有较高要求,限于单体锂电池的电压和容量,auv必须将成百个的单体电池串并联形成电池组。近年来,研究人员发现电池在使用过程中因温度差异、内阻差异和库仑效率差异而导致的一致性逐渐恶化是电池组状态估计中不可忽视的关键问题。因此,研究变得更加关注电池单体之间的差异。一种被广泛接受的方法是建立均值差模型(mdm)。mdm由“平均模型”(mm)与“差异模型”(dm)构成。但从目前的研究可以发现,现有的研究成果应用于水下航行器领域还存在一些问题。
3、首先,电池组模型多采用一阶rc-ecm作为mm。然而,电池的奈奎斯特曲线在中频下不是标准的半圆。这意味着一阶rc-mm的标准rc网络不适合模拟电池在整个频率范围内的电压特性。因此,对于工况复杂多变、峰值瞬态电流过大的电动汽车应用,将极大地考验rc网络的精度和动态跟随能力。
4、其次,目前ekf族算法是电池状态估计的首选方法,因为它们结构简单、稳定且易于调整。然而,ekf算法需要假设系统噪声服从高斯分布。这使得它不适用于水下航行器应用。在水下航行器应用中,振动、电磁等问题使得系统噪声不服从高斯分布,其分布未知。如果基于ekf算法对电池组中的每个电芯进行状态估计,可能会使估计误差增大,不稳定。
5、再次,不一致性恶化造成的容量差异不容忽视,因此,电池组soc和容量的联合估计是必要的。
6、最后,降低大规模电池单体状态估计的计算预算也是我们不得不考虑的问题。因此,需要发明能代表电芯之间主要差异的轻量化电池组模型和考虑参数或状态变化特征的及时更新策略。
技术实现思路
1、本发明所要解决的技术问题是:目前常用的一阶rc网络的等效电路模型精度和动态跟随能力不足,且常见的ekf算法不适用于水下航行器应用,会使估计误差增大,不稳定性增强。
2、本发明提供一种串联电池组的基于多模型融合的多状态联合估计方法,该方法以改善电池组模型在复杂工况下的动态特性,兼顾计算复杂度,提高电池组多状态估计的准确性和鲁棒性。
3、本发明第一个目的是提供一种串联电池组的基于多模型融合的多状态联合估计方法,用于对串联电池组的荷电状态及容量进行估计,包括:
4、获取串联电池组的电压和电流及内阻;
5、基于二阶rc模型建立串联电池组的均值电路模型;
6、基于rint模型建立串联电池组的差异模型;
7、根据串联电池组的电压和电流及内阻,通过条件更新策略对均值电路模型中的参数进行更新,获取更新后的均值电路模型;
8、根据串联电池组的电压、电流和内阻,以及串联电池组中的电池数量,通过固定频率分组策略对差异模型中的参数进行更新,获取更新后的差异模型;
9、根据更新后的均值电路模型和更新后的差异模型,获取串联电池组中每个电池的荷电状态与容量之间的耦合关系的均值差多状态空间方程组;
10、根据均值差多状态空间方程组,基于多尺度双h无限滤波算法对串联电池组中的荷电状态及容量进行联合估计。
11、在一实施例中,所述均值差多状态空间方程包括均值状态空间方程组和差分状态空间方程组。
12、在一实施例中,所述均值状态空间方程组包括平均荷电状态的状态空间方程、平均容量的状态空间方程以及平均端电压观测方程。
13、在一实施例中,所述差分状态空间方程组包括每个电池的荷电状态差的状态空间方程、容量差的状态空间方程以及端电压之差观测方程。
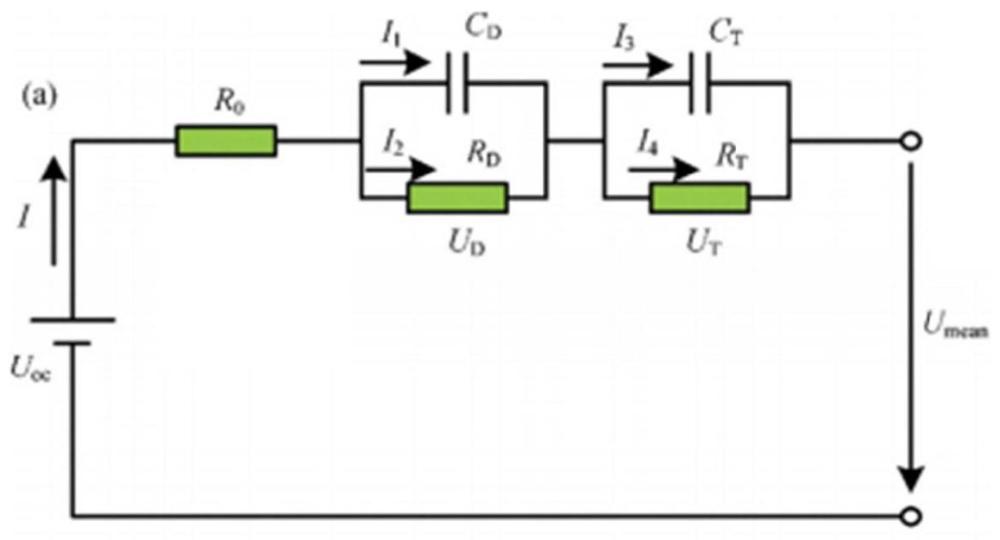
14、在一实施例中,所述基于二阶rc模型建立串联电池组的均值电路模型,包括:
15、ud,mean(k)=uoc,mean(k)-r0,mean(k)i(k)-ud(k)-ut(k)
16、式中,ud,mean(k)是串联电池组在第k个采样点的平均端电压;
17、uoc,mean(k)是串联电池组在第k个采样点的平均ocv;
18、r0,mean(k)是串联电池组在第k个采样点的平均欧姆内阻;
19、i(k)是串联电池组在第k个采样点的电流,其放电为正,充电为负;
20、ud(k)、ut(k)是串联电池组在第k个采样点中并联元件的电压。
21、在一实施例中,所述uoc,mean(k)可以表示为时间k处平均soc值的函数,即uoc,mean(k)=uoc(socmean(k));用经验方程来拟合uoc,mean(k)的函数如下:
22、
23、式中,k0~k4是参数,用socmean(k)代替自变量soc,得到uoc(socmean(k))。
24、在一实施例中,通过条件更新策略对均值电路模型中的参数进行更新过程中,更新的参数为ocv相关参数k0~k4,采用具有遗忘因子λ的递归最小二乘法,更新ocv相关参数k0~k4。
25、在一实施例中,所述基于rint模型建立串联电池组的差异模型,包括:
26、
27、式中,是由第m个电池的soc与平均socmean之间的差异引起的ocv开路电压差异;
28、是第m个电池的内阻与平均内阻r0,mean之差;
29、i(k)为串联电池组电流,其放电为正,充电为负;
30、是第m个电池的端电压与平均端电压ud,mean之差;
31、m=1,2,...,n,其中n表示电池组中的电池总数。
32、在一实施例中,通过固定频率分组策略对差异模型中的参数进行更新过程中,包括:使用定频分组更新策略更新差分内阻其中m=1,2,...,n,n表示电池组中的电池总数;n个电池单元被分成nr个组;在每个采样周期内,只更新一组即每个采样周期只更新内阻差以达到复杂性和及时性的折衷;在nr个采样周期之后,采用具有遗忘因子λ的递归最小二乘法,对所有的进行更新。
33、在一实施例中,所述基于多尺度双h无限滤波算法对串联电池组中的荷电状态及容量进行联合估计时,包括:对串联电池组中的平均荷电状态及平均容量的多尺度联合估计,或者对串联电池组中的差异荷电状态及差异容量的多尺度联合估计。
34、本发明至少具有如下有益效果:
35、本发明提出了一种串联电池组的基于多模型融合的多状态联合估计方法。mdm模型的主要目的是解耦电芯不一致性和电池组状态。mdm模型中包括了两个子模型,即cmm和cdm。选择二阶rc模型作为电芯均值电路模型(cmm)来表示电池组的整体性能,采用假设的rint模型作为电池差异模型(cdm)来评估soc差异,利用粒子群算法(pso)对均值差模型(mdm)的参数进行辨识。然后,利用扩展卡尔曼滤波(ekf)估计平均soc和单体soc差。
36、本发明具有以下技术效果:
37、1)提出了一种新的基于二阶rc模型的均值电路模型(2rc-mm)和rint-dm的mdm,与传统的基于一阶rc-ecm的mdm相比,新的mdm在电流剧烈波动且随机的电动汽车领域中,在精度和复杂度之间的权衡上具有更好的效果。
38、2)围绕新的mdm,提出了模型参数的差异化更新策略。这种差异化的更新策略可以根据其参数的变化特点及时更新新的mdm。既保证了新mdm的准确性,又降低了更新策略的复杂度。
39、3)基于新的mdm,提出了均值差多状态空间方程。这些空间方程可以表征soc与容量之间的耦合关系。在准确性和实用性方面,它们比单状态空间方程更有优势。
40、4)根据soc和容量的时变特性,提出了多时间尺度的估计框架。在多时间尺度估计框架下,采用mts-hif算法实现对电池组中各电芯soc和容量的精确联合估计。与ekf族算法相比,具有更好的鲁棒性和稳定性。更适用于噪声未知、可变的复杂环境下电池组的多状态联合估计。
- 还没有人留言评论。精彩留言会获得点赞!