浮空器故障诊断方法、装置、电子设备及存储介质
本发明涉及计算机,尤其涉及一种浮空器故障诊断方法、装置、电子设备及存储介质。
背景技术:
1、风机是浮空器调节气囊内气体压力的关键设备,而风机旋转叶片是其核心部件,浮空器风机运行于临近空间极端环境中,风机叶片的健康状况对于风机乃至浮空器的安全、平稳和高效运行具有重大意义。浮空器风机作为一种小型透平机械,运行过程中叶片承受复杂的冲击载荷和极端低温,容易产生疲劳及失效等问题,而叶片振动导致的疲劳断裂故障和事故尤为突出,同时可以通过叶片振动参数辨识实现叶片早期故障状态预计。因此,对叶片进行振动监测是很有必要的,而同步振动阻尼比与叶片的振动稳定性关系密切,当叶片出现裂纹时其振动模态的阻尼比将会明显变化,通过跟踪叶片同步振动阻尼比的变化,可以达到故障诊断和故障预警的目的。
2、对于包括风机叶片在内的透平机械的旋转叶片的振动监测,主要有两种方式:接触式测量方式和非接触式测量方式,接触式方法成本高且无法长期有效监测,而目前常规使用的非接触式测量方式大多采用叶尖定时(blade tip timing)方法,通过采集叶片的到达时间测量叶片的振动幅值,并使用相关方法进行振动参数辨识。
3、相关技术中,基于非接触式的叶片阻尼比辨识方法需要3个及以上传感器,在正弦拟合时认为残余振动直流偏量是一致的,而实际上每个传感器所采集到的残余振动直流偏量是不同的,导致引入误差,降低了振动阻尼比的检测精度,浮空器故障诊断结果的准确度较低。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供一种浮空器故障诊断方法、装置、电子设备及存储介质。
2、第一方面,本发明提供一种浮空器故障诊断方法,包括:
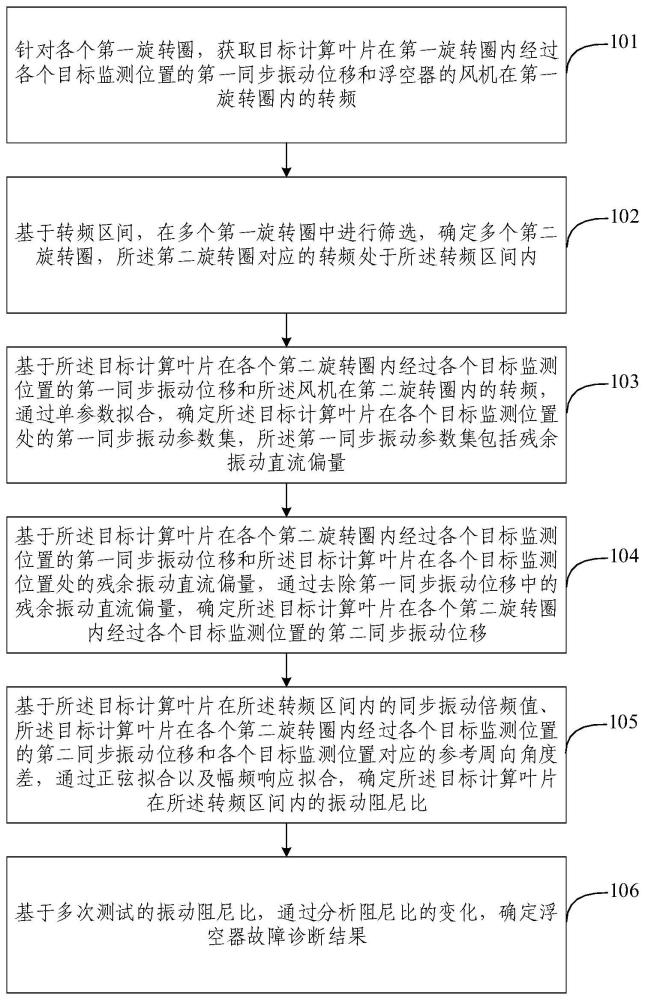
3、针对各个第一旋转圈,获取目标计算叶片在第一旋转圈内经过各个目标监测位置的第一同步振动位移和浮空器的风机在第一旋转圈内的转频,所述目标计算叶片为所述风机中任意一个叶片,所述风机的外壳上设置有多个所述目标监测位置;
4、基于转频区间,在多个第一旋转圈中进行筛选,确定多个第二旋转圈,所述第二旋转圈对应的转频处于所述转频区间内,所述转频区间是基于目标计算叶片在旋转圈内经过各个目标监测位置的第一同步振动位移,通过分析同步振动响应所确定的;
5、基于所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第一同步振动位移和所述风机在第二旋转圈内的转频,通过单参数拟合,确定所述目标计算叶片在各个目标监测位置处的第一同步振动参数集,所述第一同步振动参数集包括残余振动直流偏量;
6、基于所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第一同步振动位移和所述目标计算叶片在各个目标监测位置处的残余振动直流偏量,通过去除第一同步振动位移中的残余振动直流偏量,确定所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移;
7、基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合以及幅频响应拟合,确定所述目标计算叶片在所述转频区间内的振动阻尼比,所述参考周向角度差用于表示目标监测位置与参考位置之间的周向角度差,所述参考位置为所述风机上的任意一个周向位置;
8、基于多次测试的振动阻尼比,通过分析阻尼比的变化,确定浮空器故障诊断结果。
9、可选地,根据本发明提供的一种浮空器故障诊断方法,所述基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合以及幅频响应拟合,确定所述目标计算叶片在所述转频区间内的振动阻尼比,包括:
10、基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合,确定所述目标计算叶片在各个第二旋转圈内的第二同步振动参数集,所述第二同步振动参数集包括第一振幅分量和第二振幅分量;
11、基于所述目标计算叶片在各个第二旋转圈内的第一振幅分量和第二振幅分量,确定所述目标计算叶片在各个第二旋转圈内的第三同步振动位移;
12、基于所述目标计算叶片在各个第二旋转圈内的第三同步振动位移和各个第二旋转圈对应的转频,通过幅频响应拟合,确定所述目标计算叶片在所述转频区间内的第三同步振动参数集,所述第三同步振动参数集包括振动阻尼比。
13、可选地,根据本发明提供的一种浮空器故障诊断方法,所述多个所述目标监测位置的位置总数大于或等于3,所述基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合,确定所述目标计算叶片在各个第二旋转圈内的第二同步振动参数集,包括:
14、通过以下第一正弦拟合公式,确定所述目标计算叶片在各个第二旋转圈内的第二同步振动参数集;
15、
16、其中:
17、
18、
19、
20、yrev表示第二同步振动参数集,db表示残余振动直流偏量,a1表示第一振幅分量,a2表示第二振幅分量,neo表示所述目标计算叶片在所述转频区间内的同步振动倍频值,θi(i=1,2,3,...,np)表示第i个目标监测位置对应的参考周向角度差,np表示多个所述目标监测位置的位置总数,表示所述目标计算叶片经过第i个目标监测位置的第二同步振动位移,rev表示第二旋转圈的编号。
21、可选地,根据本发明提供的一种浮空器故障诊断方法,所述多个所述目标监测位置的位置总数大于或等于2,所述基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合,确定所述目标计算叶片在各个第二旋转圈内的第二同步振动参数集,包括:
22、通过以下第二正弦拟合公式,确定所述目标计算叶片在各个第二旋转圈内的第二同步振动参数集;
23、
24、其中:
25、
26、
27、
28、yrev表示第二同步振动参数集,a1表示第一振幅分量,a2表示第二振幅分量,neo表示所述目标计算叶片在所述转频区间内的同步振动倍频值,θi(i=1,2,3,...,np)表示第i个目标监测位置对应的参考周向角度差,np表示多个所述目标监测位置的位置总数,表示所述目标计算叶片经过第i个目标监测位置的第二同步振动位移,rev表示第二旋转圈的编号。
29、可选地,根据本发明提供的一种浮空器故障诊断方法,所述基于所述目标计算叶片在各个第二旋转圈内的第一振幅分量和第二振幅分量,确定所述目标计算叶片在各个第二旋转圈内的第三同步振动位移,包括:
30、通过以下振动幅值公式,确定所述目标计算叶片在各个第二旋转圈内的第三同步振动位移;
31、
32、其中,amax表示第三同步振动位移,a1表示第一振幅分量,a2表示第二振幅分量。
33、可选地,根据本发明提供的一种浮空器故障诊断方法,所述基于所述目标计算叶片在各个第二旋转圈内的第三同步振动位移和各个第二旋转圈对应的转频,通过幅频响应拟合,确定所述目标计算叶片在所述转频区间内的第三同步振动参数集,包括:
34、通过以下幅频响应拟合公式,确定所述目标计算叶片在所述转频区间内的第三同步振动参数集;
35、
36、其中,amax表示第三同步振动位移,ω表示第二旋转圈对应的转频,第三同步振动参数集包括a0、ξ和fn,a0表示幅值系数,ξ表示所述目标计算叶片的振动阻尼比,fn表示共振中心频率值。
37、可选地,根据本发明提供的一种浮空器故障诊断方法,所述基于所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第一同步振动位移和所述风机在第二旋转圈内的转频,通过单参数拟合,确定所述目标计算叶片在各个目标监测位置处的第一同步振动参数集,包括:
38、通过以下单参数拟合公式,确定所述目标计算叶片在各个目标监测位置处的第一同步振动参数集;
39、
40、其中,
41、x表示第一同步振动位移,ω′表示转频区间,第一同步振动参数集包括a0,q,ξ,fn和db,其中a0表示幅值系数,q表示品质因数,且q=1/(2ξ),ξ表示所述目标计算叶片的振动阻尼比,表示相位,fn表示共振中心频率值,db表示残余振动直流偏量。
42、第二方面,本发明还提供一种浮空器故障诊断装置,包括:
43、叶片监测模块,用于针对各个第一旋转圈,获取目标计算叶片在第一旋转圈内经过各个目标监测位置的第一同步振动位移和浮空器的风机在第一旋转圈内的转频,所述目标计算叶片为所述风机中任意一个叶片,所述风机的外壳上设置有多个所述目标监测位置;
44、旋转圈筛选模块,用于基于转频区间,在多个第一旋转圈中进行筛选,确定多个第二旋转圈,所述第二旋转圈对应的转频处于所述转频区间内,所述转频区间是基于目标计算叶片在旋转圈内经过各个目标监测位置的第一同步振动位移,通过分析同步振动响应所确定的;
45、单参数拟合模块,用于基于所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第一同步振动位移和所述风机在第二旋转圈内的转频,通过单参数拟合,确定所述目标计算叶片在各个目标监测位置处的第一同步振动参数集,所述第一同步振动参数集包括残余振动直流偏量;
46、振动直流偏量去除模块,用于基于所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第一同步振动位移和所述目标计算叶片在各个目标监测位置处的残余振动直流偏量,通过去除第一同步振动位移中的残余振动直流偏量,确定所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移;
47、多次拟合模块,用于基于所述目标计算叶片在所述转频区间内的同步振动倍频值、所述目标计算叶片在各个第二旋转圈内经过各个目标监测位置的第二同步振动位移和各个目标监测位置对应的参考周向角度差,通过正弦拟合以及幅频响应拟合,确定所述目标计算叶片在所述转频区间内的振动阻尼比,所述参考周向角度差用于表示目标监测位置与参考位置之间的周向角度差,所述参考位置为所述风机上的任意一个周向位置;
48、故障诊断模块,用于基于多次测试的振动阻尼比,通过分析阻尼比的变化,确定浮空器故障诊断结果。
49、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述浮空器故障诊断方法。
50、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述浮空器故障诊断方法。
51、本发明提供的浮空器故障诊断方法、装置、电子设备及存储介质,通过获取目标计算叶片在各个第一旋转圈内经过各个目标监测位置的第一同步振动位移和浮空器的风机在第一旋转圈内的转频,可以基于转频区间,筛选出多个第二旋转圈,进而可以通过单参数拟合确定目标计算叶片在各个目标监测位置处的残余振动直流偏量,进而可以去除第一同步振动位移中的残余振动直流偏量,以获取第二同步振动位移,进而可以通过正弦拟合以及幅频响应拟合,确定目标计算叶片在转频区间内的振动阻尼比,进而通过分析阻尼比的变化,可以确定浮空器故障诊断结果,通过单参数拟合去除同步振动位移中的残余振动直流偏量,能够避免每个目标监测位置所采集到的残余振动直流偏量不相同影响正弦拟合,有效地防止引入相应误差,能够提高振动阻尼比的检测精度,实现精确地获取浮空器故障诊断结果。
- 还没有人留言评论。精彩留言会获得点赞!