一种弯曲道路上基于智能超表面的非视距目标检测方法
本发明涉及交通安全领域,尤其涉及一种弯曲道路上基于智能超表面的非视距目标检测方法。
背景技术:
1、道路交通安全已成为全球广泛关注的问题。
2、弯曲道路口作为道路交通系统的咽喉,交通特性复杂,常常成为交通事故多发点。目前,弯曲道路口等视觉盲区主要通过凸面镜扩大驾驶员观察范围,但其易受光线及天气影响,且无法满足未来无人自动驾驶等智慧城市的迫切需求。智能超表面作为目前研究的热点,结合现有车载雷达传感器,可以利用电磁波实现全天时全天候的非视距探测,扩大信息感知视野,同时可转化为数字信息满足无人自动驾驶等未来智慧城市要求。
3、智能超表面具备强大的波束调控能力,可以实现对电磁波的时间、空间、频谱等多维信息的控制。作为低成本无线中继,目前在无线通信领域已得到广泛研究。例如申请号为202210151425.7的中国专利公开了一种基于全向智能超表面的通信系统设计方法。但是,通信系统发送信号与接收信号只需要一次超表面反射。而雷达系统收发端口通常位于同一位置,发射信号与接收信号需要经过两次超表面反射和一次目标反射,这意味着,基于智能超表面的非视距目标检测将不得不面对低信噪比、杂波所带来的严峻挑战。因此在雷达领域,其在中继传输方面的研究则相对较少。
技术实现思路
1、本发明的目的在于提供一种弯曲道路上基于智能超表面的非视距目标检测方法。
2、为实现上述发明目的,本发明提供一种弯曲道路上基于智能超表面的非视距目标检测方法,包括以下步骤:
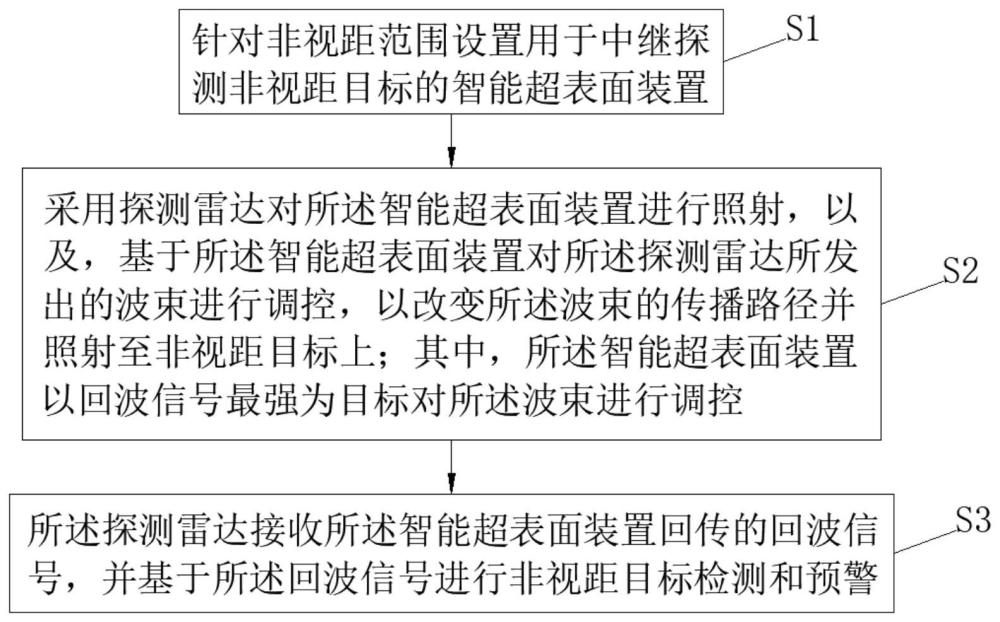
3、s1.针对非视距范围设置用于中继探测非视距目标的智能超表面装置;
4、s2.采用探测雷达对所述智能超表面装置进行照射,以及,基于所述智能超表面装置对所述探测雷达所发出的波束进行调控,以改变所述波束的传播路径并照射至非视距目标上;其中,所述智能超表面装置以回波信号最强为目标对所述波束进行调控;
5、s3.所述探测雷达接收所述智能超表面装置回传的回波信号,并基于所述回波信号进行非视距目标检测和预警。
6、根据本发明的一个方面,步骤s3中,所述探测雷达接收所述智能超表面装置回传的回波信号,并基于所述回波信号进行非视距目标检测和预警的步骤中,包括:
7、s31.所述探测雷达接收所述智能超表面装置回传的回波信号,并对所述回波信号进行预处理,并获取所述非视距目标的多维信息;其中,所述多维信息包括:距离信息、速度信息、角度信息;
8、s32.基于预处理后的所述回波信号生成距离多普勒图像;
9、s33.将所述距离多普勒图像输入预训练的识别模型,基于所述识别模型进行所述非视距目标检测和预警。
10、根据本发明的一个方面,步骤s2中,所述智能超表面装置以回波信号最强为目标对所述波束进行调控的步骤中,基于构建的优化问题模型以判断出所述回波信号的强弱;
11、所述优化问题模型包括:所述智能超表面装置的单元入射电场强度和所述探测雷达的雷达接收功率。
12、根据本发明的一个方面,所述单元入射电场强度以窄带假设条件构建,其表示为:
13、
14、其中,ein表示单元入射电场强度;
15、j表示虚数单位;
16、z0表示介质的特性阻抗;
17、φ1表示与探测雷达和智能超表面装置之间传播路径相关的相位项,以及雷达发射天线的相位响应;
18、表示智能超表面装置处平面波空间功率密度,表示为:
19、
20、其中,pt表示探测雷达峰值功率,gt表示探测雷达发射天线增益,fr(θr,φr)表示探测雷达观测方向(θr,φr)的归一化雷达辐射功率方向图,r1=||sr-sris||表示探测雷达和智能超表面装置之间的距离,sr表示探测雷达位置,sris表示智能超表面装置位置;
21、s1表示智能超表面装置与来波方向相关的转向矩阵,表示为:
22、
23、其中,表示垂直和水平智能超表面装置流形向量,其中,uris=sin(θris)cos(φris),υris=sin(θris)sin(φris)分别表示方向余弦,λ0表示雷达工作波长,(θris,φris)表示智能超表面装置方向,表示探测雷达与智能超表面装置相对方向;
24、所述探测雷达的雷达接收功率以互易性条件构建,其中,假设智能超表面装置损耗为0且波束指向增益最大,则雷达接收功率理想条件下表示为:
25、
26、其中,prx表示探测雷达的雷达接收功率;
27、g表示天线功率增益;
28、ftot为合并同类型项,其表示为:
29、
30、其中,表示探测雷达与智能超表面装置相对方向的归一化智能超表面装置的单元辐射功率方向图,表示非视距目标与智能超表面装置相对方向的归一化智能超表面装置的单元辐射功率方向图;
31、ηris表示单元效率;
32、r2表示雷达与非视距目标之间的距离,表示为:r2=||st-sris||,其中,st表示非视距目标相位中心的位置;
33、σ表示智能超表面装置沿视距方向的目标功率的反射率。
34、根据本发明的一个方面,步骤s31中,所述探测雷达接收所述智能超表面装置回传的回波信号,并对所述回波信号进行预处理的步骤中,所述预处理用于对所述回波信号进行杂波抑制,其包括:
35、s311.对接收的所述回波信号进行射频干扰抑制,并生成第一处理信号;
36、s312.对所述第一处理信号进行动目标检测,抑制所述第一处理信号的静态杂波并生成第二处理信号;
37、s313.对所述第二处理信号进行处理以获得所述非视距目标。
38、根据本发明的一个方面,步骤s313中,对所述第二处理信号进行处理以获得所述非视距目标的步骤中,包括:
39、s3131.对所述第二处理信号进行分路并行处理,其中,以第一分路对所述第二处理信号进行处理获得第一目标信息,以第二分路建立杂波图并采用动态杂波抑制方式获得第二目标信息;
40、s3132.汇总所述第一目标信息和所述第二目标信息以描述所述非视距目标。
41、根据本发明的一个方面,步骤s3131中,以第一分路对所述第二处理信号进行处理获得第一目标信息的步骤中,包括:
42、对所述第二处理信号进行非相干积累;
43、利用cfar对非相干积累后的所述第二处理信号进行检测,以获得所述第一目标信息。
44、根据本发明的一个方面,步骤s3131中,以第二分路建立杂波图并采用动态杂波抑制方式获得第二目标信息的步骤中,所述第二目标信息包括杂外信息和杂内信息,则其包括:
45、s3131a.针对所述杂波图中的杂外采用杂波图法进行动态杂波抑制,以获得所述杂外信息;
46、s3131b.将所述杂外信息与预设门限进行比较,若所述杂外信息满足所述预设门限,则判定所述杂外信息为目标信息并将所述杂外信息与所述第一目标信息合并;
47、s3131c.针对所述杂波图中的杂内采用保护窗的相应单元幅值进行目标信息筛选,获得所述杂内信息;其中,所述杂内信息包含的目标信息为速度和尺度小于所述第一目标信息的慢小和/或易和杂波混淆的目标信息。
48、根据本发明的一个方面,步骤s3131b中,将所述杂外信息与预设门限进行比较的步骤中,若所述杂外信息不满足所述预设门限,则判定所述杂外信息为非目标信息并将所述杂外信息与步骤3131c中的所述杂内一同进行处理,以筛选出所述慢小和/或易和杂波混淆的目标信息。
49、根据本发明的一个方面,步骤s31中,获取所述非视距目标的多维信息的步骤中,所述距离信息和所述速度信息基于预处理后的所述回波信号所获得,所述角度信息基于所述智能超表面装置所获得。
50、根据本发明的一种方案,本发明可准确获知非视距(弱)目标的距离、速度、角度信息,具有全天时全天候工作、感知精度高、感知范围广、构造成本低等优势。
51、根据本发明的一种方案,本发明通过对雷达回波信号的预处理,解决了低信杂比环境下目标检测问题。有效提升期望目标处回波增益,抑制了非期望方向杂波干扰,改善系统检测性能。
52、根据本发明的一种方案,本发明可实现车载雷达对弯曲道路口非视距目标进行检测告警,具有更加广泛的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!