立体显示器深度的测量方法、装置、设备和存储介质
本发明涉及立体显示,尤其涉及一种立体显示器深度的测量方法、装置、设备和存储介质。
背景技术:
1、立体显示器是一种建立在人眼立体视觉机制上的新一代自由立体显示设备,它能够出色的利用多通道自动立体现实技术,不需要借助任何助视设备(如3d眼镜、头盔等),即可获得具有完整深度信息的图像,其主要显示方法有集成3d显示,光栅3d显示等,都是运用双目视差原理在显示器上显示视差图,让人眼双目接受不同的视差图,从而产生立体的感觉。在商业上,它可以被用在那些需要做立体显示的特殊地方诸如立体航空培训,立体相片自动制作机,广告业,教育,娱乐,科学研究,商业3d立体展示等等。随着硬件设备和软件设施的发展进步,3d技术已经逐步渗透到了人类生产生活中去,并在助力多行业实现技术及产品的三维提升。
2、立体显示器的深度不同会导致在立体显示器上显示的立体效果不同,因而,如何有效的对立体显示器的深度进行测量成为业内亟需解决的技术问题。
技术实现思路
1、本发明提供一种立体显示器深度的测量方法、装置、设备和存储介质,实现有效地对立体显示器的深度进行测量,测量结果的准确度较高。
2、第一方面,本发明提供一种立体显示器深度的测量方法,该方法包括:
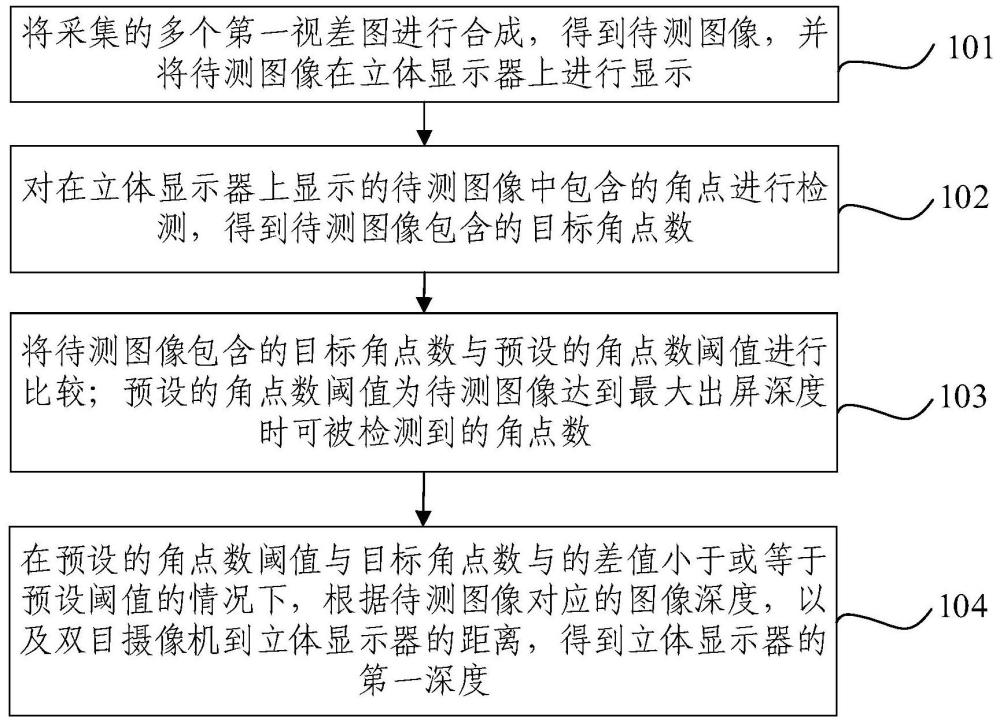
3、将采集的多个第一视差图进行合成,得到待测图像,并将所述待测图像在立体显示器上进行显示;
4、对在所述立体显示器上显示的所述待测图像中包含的角点进行检测,得到所述待测图像包含的目标角点数;
5、将所述待测图像包含的目标角点数与预设的角点数阈值进行比较;所述预设的角点数阈值为所述待测图像达到最大出屏深度时可被检测到的角点数;
6、在所述预设的角点数阈值与所述目标角点数的差值小于或等于预设阈值的情况下,根据所述待测图像对应的图像深度,以及双目摄像机到所述立体显示器的距离,得到所述立体显示器的第一深度。
7、可选地,所述在所述预设的角点数阈值与所述目标角点数的差值小于或等于预设阈值的情况下,根据所述待测图像对应的图像深度,以及双目摄像机到所述立体显示器的距离,得到所述立体显示器的第一深度,包括:
8、利用所述双目摄像机测量所述待测图像的视差信息;
9、根据所述待测图像的视差信息,确定所述待测图像对应的图像深度;所述待测图像对应的图像深度为所述待测图像到所述双目摄像机的距离;
10、将所述双目摄像机到所述立体显示器的距离减去所述待测图像到所述双目摄像机的距离,得到所述立体显示器的第一深度。
11、可选地,所述角点为所述待测图像中包含的两条及两条以上的线条的交点;所述对在所述立体显示器上显示的所述待测图像中包含的角点进行检测,得到所述待测图像包含的目标角点数,包括:
12、针对所述待测图像中的任意一个像素点,将图像窗口从所述像素点的位置向预设方向移动,计算移动前后所述图像窗口对应的灰度变化信息,并根据所述灰度变化信息计算得到所述图像窗口对应的角点响应函数的取值;
13、在所述图像窗口对应的角点响应函数的取值大于或等于预设的响应阈值的情况下,判定所述像素点的类型为角点;
14、对所述待测图像中包含的为角点的像素点的数量进行汇总,得到所述待测图像包含的目标角点数。
15、可选地,所述预设的角点数阈值为利用机器学习算法对所述待测图像包含的角点数进行预测得到的;所述机器学习算法为通过以下步骤训练得到的:
16、对至少一个原始样本图像进行预处理,得到至少一个第一样本图像;
17、根据各个第一样本图像以及各个所述第一样本图像对应的标签,对所述机器学习算法的模型参数进行调整,得到所述机器学习算法的目标模型参数;各个所述第一样本图像对应的标签为根据各个所述第一样本图像中包含的第一角点数得到的。
18、可选地,在所述待测图像为多个图像的情况下,所述方法还包括:
19、确定所述待测图像中包含的图像类型;所述图像类型包括三角形、四边形、五边形中至少一项;
20、针对所述待测图像中包含的三角形类型的图像,针对任一所述三角形类型的图像,根据所述三角形类型的图像中包含的第二角点数,确定所述三角形类型的图像的权重值;
21、根据各个所述三角形类型的图像,各个所述三角形类型的图像的权重值,各个所述三角形类型的图像对应的立体显示器的第二深度,得到所述三角形类型的图像对应的立体显示器的第三深度;
22、针对所述待测图像中包含的四边形类型的图像,针对任一所述四边形类型的图像,根据所述四边形类型的图像中包含的第三角点数,确定所述四边形类型的图像的权重值;
23、根据各个所述四边形类型的图像,所述四边形类型的图像的权重值,各个所述四边形类型的图像对应的立体显示器的第四深度,得到所述四边形类型的图像对应的立体显示器的第五深度;
24、针对所述待测图像中包含的五边形类型的图像,针对任一所述五边形类型的图像,根据所述五边形类型的图像中包含的第四角点数,确定所述五边形类型的图像的权重值;
25、根据各个所述五边形类型的图像,所述五边形类型的图像的权重值,各个所述五边形类型的图像对应的立体显示器的第六深度,得到所述五边形类型的图像对应的立体显示器的第七深度。
26、可选地,所述方法还包括:
27、对所述三角形类型的图像对应的立体显示器的第三深度、所述四边形类型的图像对应的立体显示器的第五深度,以及所述五边形类型的图像对应的立体显示器的第七深度进行求和并取均值,得到所述立体显示器的第八深度。
28、第二方面,本发明还提供一种立体显示器深度的测量装置,该装置包括:
29、获取模块,用于将采集的多个第一视差图进行合成,得到待测图像,并将所述待测图像在立体显示器上进行显示;
30、测量模块,用于对在所述立体显示器上显示的所述待测图像中包含的角点进行检测,得到所述待测图像包含的目标角点数;
31、将所述待测图像包含的目标角点数与预设的角点数阈值进行比较;所述预设的角点数阈值为所述待测图像达到最大出屏深度时可被检测到的角点数;
32、在所述预设的角点数阈值与所述目标角点数的差值小于或等于预设阈值的情况下,根据所述待测图像对应的图像深度,以及双目摄像机到所述立体显示器的距离,得到所述立体显示器的第一深度。
33、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述立体显示器深度的测量方法。
34、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述立体显示器深度的测量方法。
35、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述立体显示器深度的测量方法。
36、本发明提供的一种立体显示器深度的测量方法、装置、设备和存储介质,首先,将采集的多个第一视差图进行合成,得到待测图像,并将待测图像在立体显示器上进行显示;然后,对在立体显示器上显示的待测图像中包含的角点进行检测,得到待测图像包含的目标角点数;进一步地,将待测图像包含的目标角点数与预设的角点数阈值进行比较,其中,预设的角点数阈值为待测图像达到最大出屏深度时可被检测到的角点数;在预设的角点数阈值与目标角点数的差值小于或等于预设阈值的情况下,根据待测图像对应的图像深度,以及双目摄像机到立体显示器的距离,得到立体显示器的第一深度。本实施例提供的方法中,首先利用角点检测算法对待测图像中包含的角点数进行检测得到目标角点数,然后在预设的角点数阈值与目标角点数的差值小于或等于预设阈值的情况下,根据待测图像对应的图像深度,以及双目摄像机到立体显示器的距离,计算得到立体显示器的第一深度。本实施例中将角点检测算法和双目视差原理相结合,计算立体显示器的第一深度,测量结果的准确性较高。
- 还没有人留言评论。精彩留言会获得点赞!