基于毫米波雷达模拟器的毫米波雷达标定校验方法及设备与流程
本技术涉及自动驾驶领域,尤其涉及一种基于毫米波雷达模拟器的毫米波雷达标定校验方法及设备。
背景技术:
1、高级辅助驾驶系统是自动驾驶技术中保证驾驶舒适性和安全性的重要基石,因此,高级辅助驾驶系统的硬件在环测试至关重要。
2、现有的高级辅助驾驶系统硬件在环测试方案中,常选用毫米波雷达模拟器的方法进行毫米波雷达硬件在环测试,在测试之前需要对真实的毫米波雷达进行标定,在毫米波雷达模拟器中利用标定后的位置对毫米波雷达进行模拟,生成虚拟的毫米波雷达进行测试。因此,毫米波雷达标定的准确性对目标识别及系统功能表现有重大影响。现有技术中通常利用毫米波雷达标定模块对真实的毫米波雷达进行静态标定,由于标定成功的容忍区间较大,且真实毫米波雷达的标定误差和虚拟毫米波雷达测量误差无直接关系,容易出现虽然毫米波雷达标定通过,但真实毫米波雷达在毫米波雷达模拟器内的相对位置不够精准的情形,导致模拟生成的虚拟毫米波雷达在测试时目标识别及功能表现效果较差,不利于后面的硬件在环功能测试。
3、因此,需要一种能够提高毫米波雷达在毫米波雷达模拟器内相对位置的精准性,从而提高目标识别及功能表现效果的基于毫米波雷达模拟器的毫米波雷达标定校验方案。
技术实现思路
1、本技术提供一种基于毫米波雷达模拟器的毫米波雷达标定校验方法及设备,用以解决毫米波雷达标定通过、但真实毫米波雷达在毫米波雷达模拟器内的相对位置不够精准导致模拟生成的虚拟毫米波雷达在测试时目标识别及功能表现效果较差的技术问题。
2、第一方面,本技术提供一种基于毫米波雷达模拟器的毫米波雷达标定校验方法,包括:
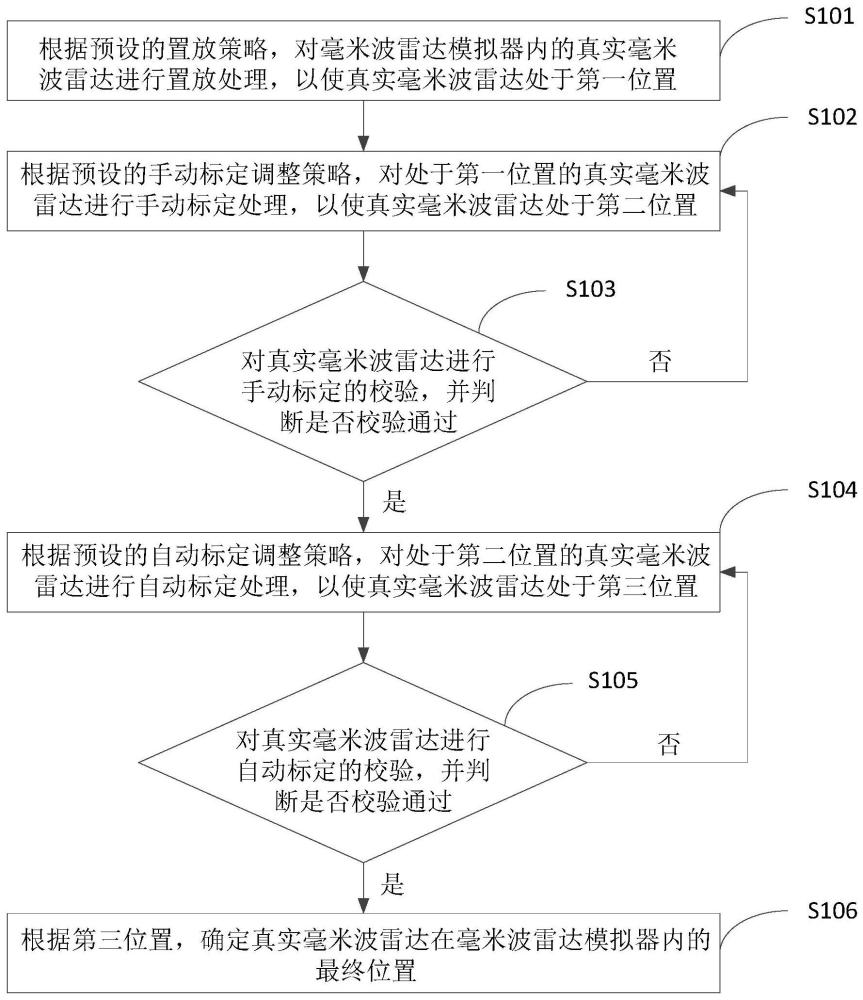
3、根据预设的置放策略,对毫米波雷达模拟器内的真实毫米波雷达进行置放处理,以使所述真实毫米波雷达处于第一位置;
4、根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理,以使所述真实毫米波雷达处于第二位置;
5、对处于第二位置的真实毫米波雷达进行手动标定的校验;
6、若手动标定校验通过,则根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理,以使所述真实毫米波雷达处于第三位置;
7、对处于第三位置的真实毫米波雷达进行自动标定的校验,若自动标定校验通过,则根据所述第三位置,确定所述真实毫米波雷达在所述毫米波雷达模拟器内的最终位置。
8、在一种可能的实施方式中,所述根据预设的置放策略,对毫米波雷达模拟器内的真实毫米波雷达进行置放处理,以使所述真实毫米波雷达处于第一位置,具体包括:
9、接收毫米波雷达的标定指令,并获取所述毫米波雷达模拟器内的真实毫米波雷达的当前位置;
10、利用水平仪对所述真实毫米波雷达的夹具进行调整,以使所述真实毫米波雷达的控制器水平且垂直放置;
11、利用激光笔对所述真实毫米波雷达的夹具进行调整,以使所述真实毫米波雷达的天线中心线与所述毫米波雷达模拟器圆筒上的天线中心线重合;
12、利用激光笔对所述真实毫米波雷达的夹具进行调整,以使所述真实毫米波雷达的天线中心高度与所述毫米波雷达模拟器圆筒上的天线中心高度一致,以将所述真实毫米波雷达由所述当前位置调整至第一位置。
13、在一种可能的实施方式中,所述根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理,以使所述真实毫米波雷达处于第二位置,具体包括:
14、将用户输入的第一静态目标信息发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第一静态目标信息模拟第一静态目标,所述第一静态目标信息包括第一静态目标与所述真实毫米波雷达之间的第一真实距离和第一真实角度;
15、利用毫米波雷达标定模块以及所述第一静态目标,对处于第一位置的真实毫米波雷达进行静态标定,以获取所述真实毫米波雷达的第一水平偏差角和第一垂直偏差角;
16、对所述真实毫米波雷达的夹具进行调整,以使所述第一水平偏差角和第一垂直偏差角均在第一角度范围内;
17、接收所述真实毫米波雷达扫描所述第一静态目标获取到的第一测试距离和第一测试角度,以使所述毫米波雷达标定模块基于第一测试距离与第一真实距离之间的第一距离差值,以及第一测试角度与第一真实角度之间的第一角度差值,对所述真实毫米波雷达进行标定以得到第一标定结果;
18、根据所述第一标定结果对所述真实毫米波雷达的夹具进行调整,以将所述真实毫米波雷达调整至第二位置,以使第一距离差值在第一距离范围内、且第一角度差值在第二角度范围内。
19、在一种可能的实施方式中,所述对处于第二位置的真实毫米波雷达进行手动标定的校验,具体包括:
20、将用户输入的第二静态目标信息发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第二静态目标信息模拟第二静态目标,所述第二静态目标信息包括第二静态目标与所述真实毫米波雷达之间的第二真实距离和第二真实角度;
21、利用毫米波雷达标定模块以及所述第二静态目标,对处于第二位置的真实毫米波雷达进行静态标定,以获取第二水平偏差角和第二垂直偏差角;
22、判断所述第二水平偏差角和第二垂直偏差角是否均在第一角度范围内;
23、若否,则重新执行所述根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理的步骤;
24、若是,则接收所述真实毫米波雷达扫描所述第二静态目标获取到的第二测试距离和第二测试角度,并确定第二测试距离与第二真实距离之间的第二距离差值以及第二测试角度与第二真实角度之间的第二角度差值;当第二距离差值在第一距离范围内、且第二角度差值在第一角度范围内,则对所述真实毫米波雷达进行动态目标的手动标定校验;当第二距离差值不在第一距离范围内、和/或第二角度差值不在第一角度范围内,则重新执行所述根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理的步骤。
25、在一种可能的实施方式中,所述对所述真实毫米波雷达进行动态目标的手动标定校验,具体包括:
26、将用户输入的第一动态目标信息发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第一动态目标信息模拟第一动态目标,所述第一动态目标信息包括第一动态目标的第一真实速度,以及第一动态目标与所述真实毫米波雷达之间的距离;
27、接收所述真实毫米波雷达扫描所述第一动态目标获取到的第一测试速度,并确定第一测试速度与第一真实速度之间的第一速度差值;
28、如果第一速度差值在第一速度范围内,则手动标定校验通过;
29、如果第一速度差值不在第一速度范围内,则重新执行所述根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理的步骤。
30、在一种可能的实施方式中,所述根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理,以使所述真实毫米波雷达处于第三位置,具体包括:
31、根据用户输入的第三静态目标信息,在交通场景仿真软件中设置对应的第三静态目标,所述第三静态目标信息包括第三静态目标与虚拟毫米波雷达之间的第三真实距离和第三真实角度;
32、接收交通场景仿真软件中的虚拟毫米波雷达扫描所述第三静态目标获取到的第一虚拟距离和第一虚拟角度,并将所述第一虚拟距离和第一虚拟角度发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第一虚拟距离和第一虚拟角度模拟第四静态目标;
33、利用毫米波雷达标定模块以及所述第四静态目标,对处于第二位置的真实毫米波雷达进行静态标定,以获取所述真实毫米波雷达的第三水平偏差角和第三垂直偏差角;对所述真实毫米波雷达的夹具进行调整,以使所述第三水平偏差角和第三垂直偏差角均在第三角度范围内,所述第一角度范围包括所述第三角度范围;
34、接收所述真实毫米波雷达扫描所述第四静态目标获取到的第三测试距离和第三测试角度,以使所述毫米波雷达标定模块基于第三测试距离与第三真实距离之间的第三距离差值,以及第三测试角度与第三真实角度之间的第三角度差值,对所述真实毫米波雷达进行标定以得到第二标定结果;根据所述第二标定结果对所述真实毫米波雷达的夹具进行调整,以使第三距离差值在第二距离范围内、且第三角度差值在第四角度范围内,所述第一距离范围包括所述第二距离范围、所述第二角度范围包括所述第四角度范围;
35、对所述真实毫米波雷达进行动态目标的自动标定,以将所述真实毫米波雷达调整至第三位置。
36、在一种可能的实施方式中,所述对所述真实毫米波雷达进行动态目标的自动标定,以将所述真实毫米波雷达调整至第三位置,具体包括:
37、根据用户输入的第二动态目标信息,在交通场景仿真软件中设置对应的第二动态目标,所述第二动态目标信息包括第二动态目标的第二真实速度,以及第二动态目标与所述虚拟毫米波雷达之间的距离;
38、接收交通场景仿真软件中的虚拟毫米波雷达扫描所述第二动态目标获取到的第一虚拟速度和第二虚拟距离,并将所述第一虚拟速度和第二虚拟距离发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第一虚拟速度和第二虚拟距离模拟第三动态目标;
39、接收所述真实毫米波雷达扫描所述第三动态目标获取到的第二测试速度,以使所述毫米波雷达标定模块基于第二测试速度与第二真实速度之间的第二速度差值,对所述真实毫米波雷达进行标定以得到第三标定结果,所述第三标定结果使得所述第二速度差值在第二速度范围内,所述第一速度范围包括所述第二速度范围;
40、根据所述第三标定结果对所述真实毫米波雷达的夹具进行调整,以将所述真实毫米波雷达调整至第三位置。
41、在一种可能的实施方式中,所述对处于第三位置的真实毫米波雷达进行自动标定的校验,具体包括:
42、根据用户输入的第五静态目标信息,在交通场景仿真软件中设置对应的第五静态目标,所述第五静态目标信息包括第五静态目标与虚拟毫米波雷达之间的第五真实距离和第五真实角度;
43、接收交通场景仿真软件中的虚拟毫米波雷达扫描所述第五静态目标获取到的第三虚拟距离和第二虚拟角度,并将所述第三虚拟距离和第二虚拟角度发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第三虚拟距离和第二虚拟角度模拟第六静态目标;
44、利用毫米波雷达标定模块以及所述第六静态目标,对处于第三位置的真实毫米波雷达进行静态标定,以获取所述真实毫米波雷达的第四水平偏差角和第四垂直偏差角;
45、判断所述第四水平偏差角和第四垂直偏差角是否均在第三角度范围内;
46、若否,则重新执行所述根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理的步骤;
47、若是,则接收所述真实毫米波雷达扫描所述第六静态目标获取到的第四测试距离和第四测试角度,并确定第四测试距离与第四真实距离之间的第四距离差值以及第四测试角度与第四真实角度之间的第四角度差值;当第四距离差值在第二距离范围内、且第四角度差值在第四角度范围内,则对所述真实毫米波雷达进行动态目标的自动标定校验;当第四距离差值不在第二距离范围、和/或第四角度差值不在第四角度范围内,则重新执行所述根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理的步骤。
48、在一种可能的实施方式中,所述对所述真实毫米波雷达进行动态目标的自动标定校验,具体包括:
49、根据用户输入的第四动态目标信息,在交通场景仿真软件中设置对应的第四动态目标,所述第四动态目标信息包括第四动态目标的第三真实速度,以及第四动态目标与所述虚拟毫米波雷达之间的距离;
50、接收交通场景仿真软件中的虚拟毫米波雷达扫描所述第四动态目标获取到的第二虚拟速度和第四虚拟距离,并将所述第二虚拟速度和第四虚拟距离发送至所述毫米波雷达模拟器,以使所述毫米波雷达模拟器根据所述第二虚拟速度和第四虚拟距离模拟第五动态目标;
51、接收所述真实毫米波雷达扫描所述第五动态目标获取到的第三测试速度,并确定第三测试速度与第三真实速度之间的第三速度差值;
52、如果第三速度差值在第二速度范围内,则自动标定校验通过;
53、如果第三速度差值不在第二速度范围内,则重新执行所述根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理的步骤。
54、第二方面,本技术提供一种毫米波雷达标定校验系统,包括:毫米波雷达读值模块、理想传感器模块、毫米波雷达标定模块、执行模块、理想车道居中保持模块和毫米波雷达模拟器天线;
55、毫米波雷达标定模块和毫米波雷达模拟器天线用于真实毫米波雷达的静态标定,获取真实毫米波雷达的水平偏差角和垂直偏差角;
56、毫米波雷达读值模块用于获取真实毫米波雷达探测到的距离静态目标的测试距离和测试角度,或者距离动态目标的测试速度;
57、理想车道居中保持模块用于保持交通场景仿真软件中装有虚拟毫米波雷达的虚拟本车始终保持在虚拟车道中心行驶;
58、理想传感器模块用于获取交通场景仿真软件中的虚拟毫米波雷达探测到的虚拟本车距离静态目标的虚拟距离和虚拟角度,或者距离动态目标的虚拟速度和虚拟距离;
59、执行模块用于根据预设的置放策略,对毫米波雷达模拟器内的真实毫米波雷达进行置放处理,以使真实毫米波雷达处于第一位置;根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理,以使真实毫米波雷达处于第二位置;对处于第二位置的真实毫米波雷达进行手动标定的校验;在手动标定校验通过时,根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理,以使真实毫米波雷达处于第三位置;对处于第三位置的真实毫米波雷达进行自动标定的校验,若自动标定校验通过,则根据第三位置,确定真实毫米波雷达在毫米波雷达模拟器内的最终位置。
60、第三方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
61、所述存储器存储计算机执行指令;
62、所述处理器执行所述存储器存储的计算机执行指令,以实现上述的方法。
63、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述的方法。
64、第五方面,本技术提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法。
65、本技术提供的基于毫米波雷达模拟器的毫米波雷达标定校验方法及设备,可以根据预设的置放策略,对毫米波雷达模拟器内的真实毫米波雷达进行置放处理,以使真实毫米波雷达处于第一位置;根据预设的手动标定调整策略,对处于第一位置的真实毫米波雷达进行手动标定处理,以使真实毫米波雷达处于第二位置;对处于第二位置的真实毫米波雷达进行手动标定的校验;在手动标定校验通过时,根据预设的自动标定调整策略,对处于第二位置的真实毫米波雷达进行自动标定处理,以使真实毫米波雷达处于第三位置;对处于第三位置的真实毫米波雷达进行自动标定的校验,若自动标定校验通过,则根据第三位置,确定真实毫米波雷达在毫米波雷达模拟器内的最终位置。本技术的方法,可以首先根据预设的置放策略,对毫米波雷达模拟器内的真实毫米波雷达的位置进行初步调整,从而提高毫米波雷达在毫米波雷达模拟器内相对位置的精准性。然后,还可以根据预设的手动标定调整策略对处于第一位置的真实毫米波雷达进行手动标定处理,并进行手动标定的校验,利用手动标定及校验进一步提高毫米波雷达在毫米波雷达模拟器内相对位置的精准性。之后,还可以根据预设的自动标定调整策略对处于第二位置的真实毫米波雷达进行自动标定处理,并进行自动标定的校验,利用自动标定及校验更进一步地提高毫米波雷达在毫米波雷达模拟器内相对位置的精准性,将真实毫米波雷达的标定误差和虚拟毫米波雷达测量误差联系起来,使得真实毫米波雷达在毫米波雷达模拟器内的最终位置能够准确进行目标识别及功能表现,从而提高后续毫米波雷达模拟和功能测试的准确性。
- 还没有人留言评论。精彩留言会获得点赞!