一种基于单线激光雷达点云配准的底盘充电回桩方法
本发明涉及智能服务机器人的导航,特别是一种基于单线激光雷达点云配准的底盘充电回桩方法。
背景技术:
1、智能机器人行业,特别是自主移动机器人的底盘回桩充电技术,正在迅速发展。首先,底盘回桩充电技术需要解决的一个重要问题是定位精度。由于充电桩的位置可能会发生变化,或者在复杂的环境中难以识别,因此机器人需要具备较高的定位精度才能准确地找到充电桩并进行充电。其次,底盘回桩充电技术还需要解决路径规划问题。在实际应用中,机器人可能需要在复杂的道路环境中进行路径规划,以避免碰撞和堵塞。此外,底盘回桩充电技术还需要考虑到机器人的安全性和可靠性。在实际应用中,机器人可能会遇到各种异常情况,如充电桩故障、电力供应中断等。为了保证机器人的安全和可靠运行,底盘回桩充电方案需要具备一定的容错能力和故障处理能力底盘回桩充电技术是智能机器人行业的一个重要研究方向。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于单线激光雷达点云配准的底盘充电回桩方法,基于点云配准,结合聚类,pca,计算点云最小包围框等思想筛选出充电桩点云,能够准确地找到充电桩并进行回桩充电。
2、为实现上述目的,本发明采用如下技术方案:一种基于单线激光雷达点云配准的底盘充电回桩方法,包括以下步骤:
3、步骤一:数据采集及预处理:使用单线激光雷达采集场景点云数据,对点云进行统计学滤波消除噪声点;
4、步骤二:dbscan聚类:对预处理后的点云进行欧式聚类,便于筛选点云簇;
5、步骤三:主成分分析:分别对聚类的点云簇进行pca主成分分析,通过方差来衡量各点云簇与目标点云簇的差异性;
6、步骤四:计算最小包围框:对符合方差分布的点云簇计算其最小包围框,通过包围框尺寸筛选点云簇;
7、步骤五:点云匹配:使用迭代最近点算法icp计算目标点云簇与符合包围框尺寸的点云簇的得分,筛选出最符合的点云簇;
8、步骤六:计算出变换矩阵:利用在底盘中心的目标点云簇与最符合的点云簇之间的匹配关系,计算出变换矩阵;
9、步骤七:规划底盘回桩行进路线:根据计算出的初始变换矩阵,规划出底盘回桩三步走回桩路线。
10、在一较佳的实施例中,所述步骤一中,单线激光雷达数据采集的过程包括以下几个步骤:首先,激光雷达会发射激光束,这些激光束会照射到周围的物体上并反射回来;当激光束碰到物体时,它们会反弹回雷达,并被雷达接收器捕获;此时,雷达的接收器会记录下每个反射点的时间戳和位置信息;然后,这些收集到的数据会被传送到雷达设备的内部处理器进行处理;处理过程中,雷达设备会对激光反射点的强度信息与目标物表面材质与粗糙度、激光入射角度、激光波长以及激光雷达的能量密度等因素进行关联分析;接着,基于上述分析结果和已知的激光雷达参数,设备会对这些反射点进行滤波和去噪处理,以消除由于各种因素产生的噪声点,得到更为清晰和准确的数据;
11、采用移动平均法去除数据的噪声;然后将这个平均值用于代表当前时间点的数据;这个平均值的计算窗口固定大小,较小的窗口用于平滑数据中的高频噪音,而较大的窗口用于捕捉数据中的长期趋势;
12、
13、其中,ma(t)是在时间点t处的移动平均值,x(t-i)是前n个时间点的数据值,n是滑动窗口的大小;通常,n的选择取决于数据的性质和所需的平滑效果。
14、在一较佳的实施例中,所述步骤二中,使用dbscan聚类对雷达采集的点云数据分成不同的簇或群组,以便于筛选出检测到的充电桩点云簇,流程如下:
15、1)初始化:设定两个参数,邻域半径ε和最小邻居数minpts;
16、2)随机选择一个未访问的数据点p;
17、3)检查p的ε邻域内是否有至少minpts个数据点,如果有,则创建一个新簇,并将p标记为已访问;
18、4)以p为中心,找到其ε邻域内的所有未访问数据点,将它们添加到当前簇中,并标记为已访问;
19、5)重复步骤4直到当前簇无法再扩展;
20、6)如果当前簇中的数据点数量大于等于minpts,则将该簇保留,否则将其舍弃;
21、7)重复步骤2-6直到所有数据点都被访问;
22、8)结束,得到所有点云簇的集合。
23、在一较佳的实施例中,所述步骤三中主成分分析的详细步骤如下:
24、1)数据标准化:对原始数据进行标准化处理,使得每个特征具有零均值和单位方差,以避免不同尺度之间的影响;
25、2)计算协方差矩阵:基于标准化后的数据,计算协方差矩阵;协方差矩阵反映了不同特征之间的相关性;
26、3)特征值分解:对协方差矩阵进行特征值分解,得到特征值和对应的特征向量;特征值表示各个特征向量所代表的主成分的重要程度和方差大小,特征向量则表示各个主成分的方向;
27、4)选择主成分:根据特征值的大小,选择前k个特征值对应的特征向量作为主成分;通常选择的特征值足够大,能够解释大部分的方差;
28、对每个点云簇进行主成分分析,首先对数据进行标准化处理,根据标准化处理后的数据计算协方差矩阵,对协方差矩阵进行特征值分解,得到特征值与对应的特征向量,特征值表示每个特征向量所代表的主成分的重要程度和方差大小,特征向量则表示主成分的方向,根据特征值的大小,选择最大的特征值及其对应的特征向量作为x轴,其次大的特征值及其对应的特征向量作为y轴;这些主成分将用于构建新的坐标系;根据两个特征值的大小与目标点云也就是充电桩模板主成分分析之后获得的特征值进行比较,差异大的即排除是充电桩点云的可能,差异在一定范围内的即进入下个判断。
29、在一较佳的实施例中,所述步骤四具体包括:根据步骤三获取到的点云簇转换到新坐标系,通过pca分析获得的投影矩阵w将原始二维点云簇投影到新的坐标系中;然后计算边界框坐标,在新坐标系中,找到点云簇在x和y轴上的最小和最大值,这将定义一个包含点云簇的边界框;最后定义最小包围框:使用最小和最大值确定的边界框的四个顶点,包括左下、左上、右上和右下,以及它们之间的连线,定义点云簇的最小包围框;
30、最小包围框的计算过程示例如下:
31、假设在新坐标系下,点云簇的投影结果为p=[p1,p2,...,pn],其中每个元素pi=(x,y)是一个二维点;
32、计算x轴的最小和最大值:min_x=min(pi.x),max_x=max(pi.x)
33、计算y轴的最小和最大值:min_y=min(pi.y),max_y=max(pi.y)
34、定义最小包围框的四个顶点:
35、左下角坐标:(min_x,min_y)
36、左上角坐标:(min_x,max_y)
37、右上角坐标:(max_x,max_y)
38、右下角坐标:(max_x,min_y)
39、通过这些顶点,计算出最小包围框的长度与宽度,因为实际的充电桩尺寸是固定的,通过计算出各点云簇最小包围框的长宽与实际的尺寸进行比对,符合的进入到点云配准环节,不符合的跳过。
40、在一较佳的实施例中,所述步骤五具体包括:将符合步骤四的所有点云与目标点云进行配准,若有多个点云即选择与目标点云最接近的,否则即计算该点云与目标点云的配准得分;配准得分低于设定的阈值s,即检测到充电桩,否则未检测到充电桩;具体的点云匹配流程如下:
41、1)初始化:选择一个初始的变换矩阵t,将待配准的源点云与目标点云进行初始对齐;
42、
43、2)最近邻搜索:对于源点云中的每个点,找到在目标点云中的最近邻点;
44、3)点对匹配:根据最近邻搜索的结果,建立点对之间的对应关系;
45、4)计算配准变换:使用点对之间的对应关系,计算出一个新的变换矩阵,将源点云进行变换;
46、5)更新对齐:将变换后的源点云与目标点云进行对齐,得到更新后的对齐结果;
47、6)重复迭代:重复执行步骤2-5,直到达到收敛条件,例如达到最大迭代次数或变换矩阵的变化低于某个阈值;
48、7)得分计算:通过计算匹配点对之间的距离,可以获得一个匹配得分,用于反映点云之间的准确度。
49、在一较佳的实施例中,所述步骤六具体包括:首先从符合步骤五中的点云与目标点云提取特征点,以获取局部结构信息;然后对两个点云的特征点进行匹配,通过比较特征点之间的距离或相似性度量来确定匹配关系;接着根据匹配的特征点对齐两个点云的初始位置;通过最小二乘或随机采样一致算法估计初始变换矩阵;然后通过迭代优化算法,进一步优化初始对齐的变换矩阵;最后收敛判断:在迭代优化过程中,通过设定收敛条件来判断是否达到最优结果;如果没有达到,则返回第4步继续迭代,直到满足收敛条件;
50、对于初始对齐的变换矩阵tinit和迭代优化得到的变换矩阵topt,表示为:
51、topt=argmin∑||p2-t(p1)||2
52、其中,p1代表识别出的充电桩点云中的点,p2代表目标点云中的点,t(p1)表示将p1通过变换矩阵t变换后的点。
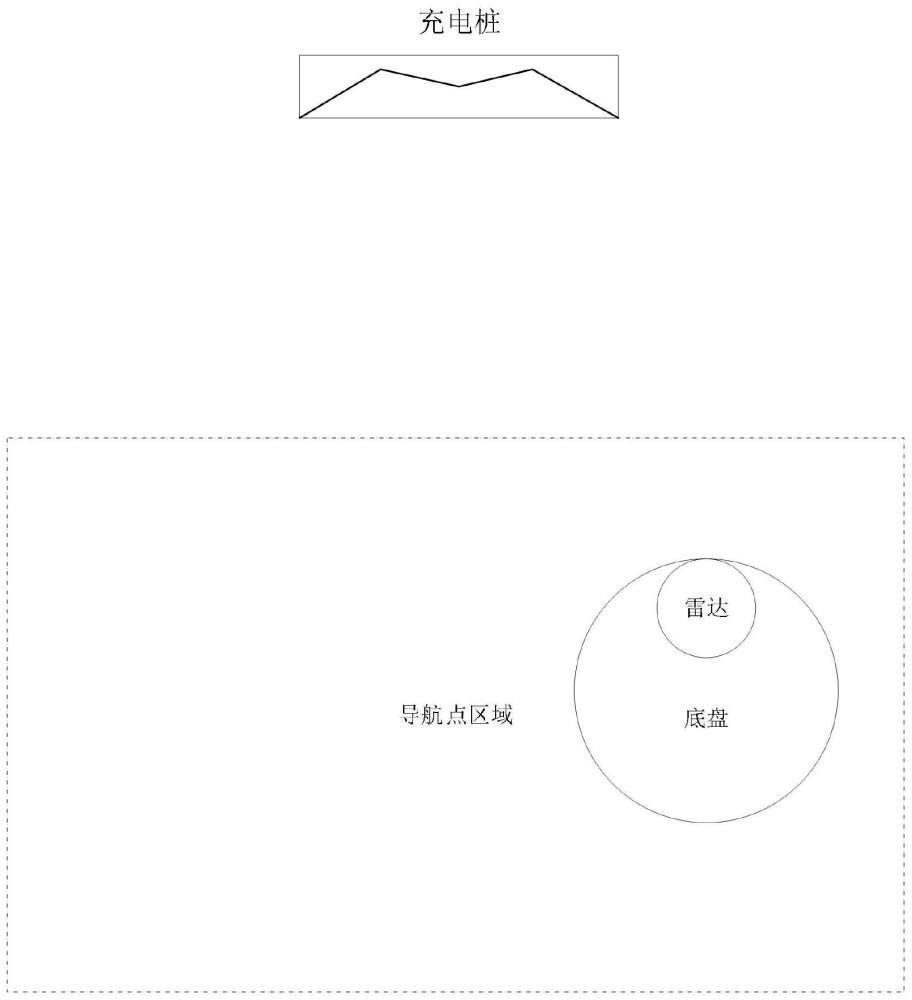
53、在一较佳的实施例中,所述步骤七具体包括:根据步骤六计算出来的变换矩阵,即计算出底盘导航至导航点区域相对于充电桩的位姿态,根据变换矩阵计算出底盘回桩三步走的具体路线,计算方式如下:
54、回桩路线一阶段:根据变换矩阵计算出底盘走到充电桩正前方50cm处的位置,并摆正方向正对着充电桩;
55、回桩路线二阶段:底盘顺时针转动180°,正背对着充电桩;
56、回桩路线三阶段:底盘后退,直到充电口接触到充电桩并且开始充电。
57、与现有技术相比,本发明具有以下有益效果:首先,使用单线激光雷达采集场景点云数据,对点云进行统计学滤波消除噪声点。这一步骤的目的是获取清晰、准确的点云数据,为后续的数据处理和分析提供基础。其次,对预处理后的点云进行欧式聚类,便于筛选点云簇。通过聚类,可以将相似的点云聚集在一起,形成点云簇,从而简化后续的处理过程。然后,分别对聚类的点云簇进行pca主成分分析,通过方差来衡量各点云簇与目标点云簇的差异性。这一步骤的目的是找出与目标点云簇差异最大的点云簇,为后续的最小包围框计算和点云匹配提供依据。接着,对符合方差分布的点云簇计算其最小包围框,通过包围框尺寸筛选点云簇。这一步骤的目的是进一步筛选出最符合的点云簇,提高匹配的准确性。然后,使用icp(迭代最近点算法)计算目标点云簇与符合包围框尺寸的点云簇的得分,筛选出最符合的点云簇。这一步骤的目的是通过比较目标点云簇与各个点云簇的相似度,找出最符合的点云簇。接着,利用在底盘中心的目标点云簇与最符合的点云簇之间的匹配关系,计算出变换矩阵。这一步骤的目的是获取底盘的位置和姿态信息,为后续的回桩路线规划提供依据。最后,根据计算出的初始变换矩阵,规划出底盘回桩三步走回桩路线。这一步骤的目的是根据底盘的位置和姿态信息,规划出一条安全、高效的回桩路线。
- 还没有人留言评论。精彩留言会获得点赞!