基于梁体挠度的斜拉索损伤识别方法、装置、终端及介质
本发明属于斜拉索损伤识别方法,更具体地说,是涉及一种基于梁体挠度的斜拉索损伤识别方法、装置、终端及介质。
背景技术:
1、作为一种大跨度桥,斜拉桥的跨越能力较强,主要由主梁、拉索和塔柱三部分组成,其中拉索是最主要的受力构件。拉索在长期使用过程中极易受到环境作用产生腐蚀,容易造成坑蚀、断丝等损伤,一定程度后会发生断裂损坏,严重危害了桥梁的使用安全性。
2、目前,拉索损伤识别主要依靠目测法和索力检测,目测受到环境的制约,准确性较差,索力检测法则难以通过自动监测来实施,不仅操作繁琐复杂,而且测得的参数极易受到污染,从而降低了损伤识别的精度。
技术实现思路
1、本发明的目的在于提供一种基于梁体挠度的斜拉索损伤识别方法、装置、终端及介质,能够方便准确的识别拉索是否损坏,并准确识别损伤索的位置。
2、为实现上述目的,本发明采用的技术方案是:提供一种基于梁体挠度的斜拉索损伤识别方法,包括以下步骤:
3、所有拉索均处于健康状态时,移动单位荷载f=1分别至拉索与梁体的各锚固点1、2、…、k、…、i、…、n,获取施加移动荷载前后各锚固点1、2、…、k、…、i、…、n处梁体的第一挠度差,并获取锚固点i处梁体的第一挠度差向量及所有锚固点的第一挠度差形成的柔度矩阵,其中,中下标第一个字母表示第i个锚固点,第二字母表示单位荷载f=1的作用位置;
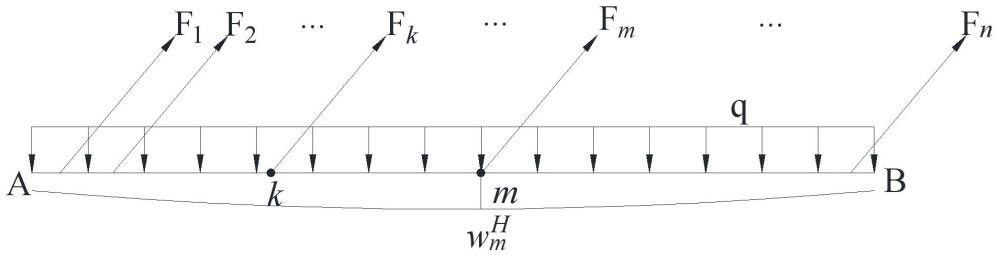
4、某一拉索损伤后形成损伤索,定义损伤索与梁体的锚固点为锚固点k,跨中拉索与梁体的锚固点为锚固点m;损伤索处于损伤状态时,将集中力p作用于锚固点m处,获取损伤索损伤前后各锚固点1、2、…、k、…、i、…、n处梁体的第二挠度差,并获取各锚固点处梁体的第二挠度差向量;
5、根据力法方程获得总索力变化值与第二挠度差向量及所有锚固点的第一挠度差形成的柔度矩阵的关系式;
6、代入所有锚固点的第一挠度差形成的柔度矩阵和第二挠度差向量以求得总索力变化值,并根据总索力变化值判断拉索是否损伤,若有拉索损伤,则判断损伤索的位置。
7、在一种可能的实现方式中,所有拉索均处于健康状态时,移动单位荷载f=1分别至拉索与梁体的各锚固点1、2、…、k、…、i、…、n,获取施加移动荷载前后各锚固点1、2、…、k、…、i、…、n处梁体的第一挠度差,并获取锚固点i处梁体的第一挠度差向量及所有锚固点的第一挠度差形成的柔度矩阵的步骤中:
8、(1)
9、在一种可能的实现方式中,某一拉索损伤后形成损伤索,定义损伤索与梁体的锚固点为锚固点k,跨中拉索与梁体的锚固点为锚固点m;损伤索处于损伤状态时,将集中力p作用于锚固点m处,获取损伤索损伤前和损伤后两个状态下各锚固点1、2、…、k、…、i、…、n的第二挠度差,并获取集中力p作用下、损伤索损伤前与损伤后两个状态下各锚固点处梁体的第二挠度差向量的步骤中:
10、(2)
11、一些实施例中,根据力法方程获得总索力变化值与第二挠度差向量及所有锚固点的第一挠度差形成的柔度矩阵的关系式步骤中:
12、按照线性叠加原理,任一锚固点i处梁体的第一挠度差、锚固点i处的索力变化值以及锚固点i处梁体的第二挠度差之间的关系式:
13、(3);
14、将公式(3)写成矩阵形式:
15、(4);
16、其中,为与锚固点1相连的拉索损伤前后的索力变化量,为与锚固点k相连的拉索损伤前后的索力变化量;为与锚固点k相连的拉索损伤前后的索力变化量,表示的是与锚固点i相连的拉索与主梁之间夹角的正弦值,表示的是与锚固点n相连的拉索与主梁之间夹角的正弦值,表示的是与锚固点k相连的拉索与主梁之间夹角的正弦值。
17、一些实施例中,将公式(3)写成矩阵形式步骤后:
18、将公式(4)写成向量形式:
19、(5);
20、解得总索力变化值:
21、(6);
22、在一种可能的实现方式中,获取施加移动荷载前后各锚固点1、2、…、k、…、i、…、n处梁体的第一挠度差步骤中:
23、根据公式(7)获取锚固点n处梁体的第一挠度差,以将第一挠度差带入所有锚固点的第一挠度差形成的柔度矩阵,
24、(7)
25、其中,表示所有拉索处于健康状态下,单位荷载f=1移动至锚固点n时,锚固点i处梁体的挠度值,表示所有拉索处于健康状态时,单位力f=1作用于锚固点n处时,锚固点i处梁体的第一挠度差,表示所有拉索处于健康状态时,锚固点i处梁体的初始挠度值;
26、获取损伤索损伤前后各锚固点1、2、…、k、…、i、…、n处梁体的第二挠度差步骤中,根据公式(8)获取锚固点k处梁体的第二挠度差,
27、(8);
28、其中,表示集中力p作用于锚固点m时,损伤索损伤前与损伤后两个状态下锚固点k处梁体的第二挠度差,表示损伤索处于损伤状态时,集中力p作用下锚固点k处梁体的挠度值,表示所有拉索处于健康状态时,锚固点k处梁体的初始挠度值。
29、在一种可能的实现方式中,根据所有锚固点的第一挠度差形成的柔度矩阵和第二挠度差向量获取总索力变化值,并根据总索力变化值判断拉索是否损伤,若有拉索损伤,则判断损伤索的位置的步骤中:
30、当总索力变化值中元素小于零时,判定存在损伤索,根据具有总索力变化值的锚固点k对应判断损伤索的位置。
31、本发明还提供了一种基于梁体挠度的斜拉索损伤识别装置,包括:
32、第一数据获取模块,用于获取第一挠度差、第一挠度差向量及所有锚固点的第一挠度差形成的柔度矩阵;所有拉索均处于健康状态下、单位荷载f=1作用于拉索与梁体的各锚固点时,锚固点i与其他锚固点1、2、…、k、…、i、…、n的挠度差,并获取单位荷载f=1作用下锚固点i处梁体的第一挠度差向量;
33、第二数据获取模块,用于获取第二挠度差及第二挠度差向量,用于获取损伤索损伤状态下、集中力p作用于锚固点i时,其他锚固点1、2、…、k、…、i、…、n与锚固点i的挠度差,并获取集中力p作用下、损伤索损伤前与损伤后各锚固点处梁体的第二挠度差向量;
34、计算模块,用于根据力法方程获得总索力变化值与第一挠度差向量以及第二挠度差向量的关系式;
35、损伤识别模块,用于根据所有锚固点的第一挠度差形成的柔度矩阵和第二挠度差向量获取总索力变化值,并根据总索力变化值判断拉索是否损伤,若有拉索损伤,则判断损伤索的位置。
36、本发明还提供了一种终端,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述方法的步骤。
37、本发明还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述方法的步骤。
38、本技术实施例所示的方案,与现有技术相比,本技术实施例提供的基于梁体挠度的斜拉索损伤识别方法,通过模型计算或实测方式获取拉索处于健康状态以及损伤状态下的第一挠度差向量、所有锚固点的第一挠度差形成的柔度矩阵以及第二挠度差向量,并结合力法方程求得总索力变化值,进而判断拉索是否发生损伤,并在发生损伤时确定损伤位置,识别过程中数据容易计算或测得,数据精度高,上述方法简单易行,对拉索的损伤判定具有较高的准确度和可信度,具有良好的可实施性。
- 还没有人留言评论。精彩留言会获得点赞!