基于无人机非接触测量的铁路既有线复测方法与流程
本发明涉及铁路勘测,具体涉及一种基于无人机非接触测量的铁路既有线复测方法。
背景技术:
1、铁路作为国家的重要基础设施,是国家经济发展的大动脉,在运输行业中起到了中流砥柱的作用。随着我国铁路交通建设的高速发展,尤其是国内高速铁路的大量修建,铁路运行速度和频率越来越高,铁路运营速度的提高对列车行车安全、平稳提出了更高的要求。为满足既有铁路的养护维修和线路改造的需求,需要对既有线路进行复测,以此来获取轨道的几何状态及线路附属构筑物的稳定性。目前传统的既有线复测主要依靠人工上线测量,测量方法包括gnss rtk+全站仪+电子水准仪测量、静(动)态轨检小车测量等,作业受天窗时间限制、测量工作量大,且人员上道作业存在安全隐患。随着铁路大幅提速后,车辆行车速度快、密度高,天窗时间缩短,采用传统的既有线测量方法很难满足铁路大规模、高质量发展的需求。
2、针对以上问题,发明专利《基于车载lidar技术的铁路线路运营维护测量方法》[公开号:cn105844995a],提出了基于车载lidar技术的铁路运营维护测量方法,将三维激光扫描仪安置在火车上,快速获取铁路轨道及沿线的高密度点云数据,通过沿线布设的靶标控制点改善点云精度,最终基于点云数据进行线路测量。该发明专利相比传统测量手段,效率得到了一定提升,但是存在三个问题:首先,车载扫描数据获取和靶标测量都要上线,并且在天窗时间内进行,存在天窗申请困难、作业时间有限、人身安全风险大等困难;其次车载lidar设备受接触网净空限制,一般架设的比较低,视野有限,对于高路基、路堑、桥梁、车站站台等区域,存在扫描盲区,导致获取的点云数据存在漏洞;最后车载lidar运行在铁路轨道上,铁路沿线布设的传感器、电务设备等对激光扫描仪、惯导和gnss设备存在电磁干扰,影响数据获取的精度。发明专利《基于航空遥感影像的铁路轨道及中线提取方法》[公开号:cn114187537a]使用影像的方式提取既有线数据,但是影像存在畸变,加之轨道马蹄外形导致非棱角信息提取精度不足,相关研究还在探索中,技术不成熟。
技术实现思路
1、本技术提供一种基于无人机非接触测量的铁路既有线复测方法及系统,以解决传统铁路复测中的时间限制、人身安全风险和数据准确性问题。
2、为了达到上述目的,本发明的技术方案如下:
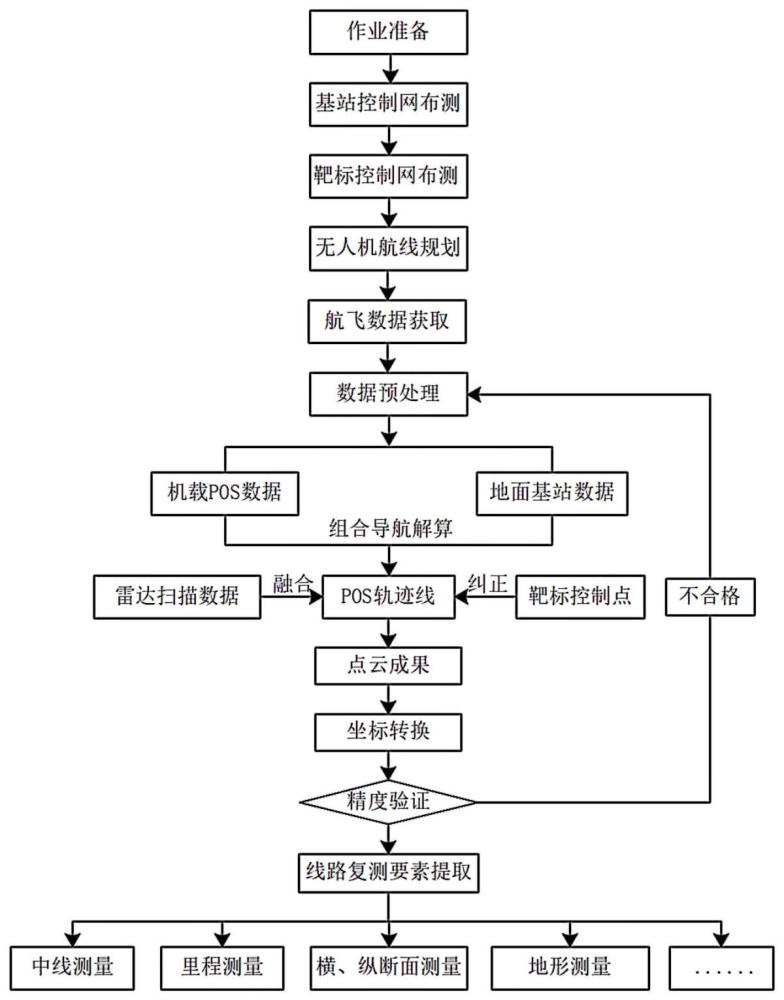
3、基于无人机非接触测量的铁路既有线复测方法,所述方法包括:
4、作业准备:收集既有铁路中线、地形数据和控制网信息,根据勘测需求选择无人机平台和机载雷达设备;
5、控制网布设及测量:布设基站控制网和靶标控制网,测量靶标控制网的靶标控制点的三维坐标;
6、无人机航线规划:利用铁路中线和地形数据规划无人机平台的航线;
7、航飞数据获取:在基站控制网的基站控制点架设若干gnss基站,利用机载雷达设备进行点云和影像数据获取;
8、扫描数据预处理:对机载雷达的gnss数据、惯导数据和gnss基站的gnss数据进行融合解算,生成高精度轨迹文件,进而生成初始点云数据和影像数据,并对初始点云数据和影像数据进行质量检查;
9、基于靶标控制点的点云精化纠正:利用靶标控制点对初始点云数据进行纠正,以提升点云数据的绝对精度;
10、线路测量要素信息提取:基于精化纠正后的点云数据,提取测量信息,测量信息包括轨道中线、里程、路基断面和地形,参考影像数据完成线路及附属设施的调查;
11、复测要素成果的检核与整理:对提取的测量信息进行检核,整理后编制复测表。
12、进一步的,所述无人机平台选用具有ppk功能的多旋翼无人机平台,搭载高精度lidar和高清摄像头,续航时间不少于60min;
13、所述机载雷达设备的激光点频不小于1000khz,扫描视场角不小于50度。
14、进一步的,所述基站控制网使用铁路现有的cpi控制网和cpi i控制网;若现有控制网的密度和精度不足,在铁路两侧新建基站控制网补充。
15、进一步的,所述靶标控制网的布设及测量,具体包括:
16、制作矩形形状的靶标板,所述靶标板采用黑白相间的颜色喷绘,喷绘面外覆磨砂膜;
17、在铁路两侧以相同的靶标间距成对布设靶标板,靶标板对角方向与铁路夹角90°,提高激光扫描效果和靶标板中心靶标控制点的识别率;
18、对靶标板进行gnss快速静态测量和水准往返测量,确定其平面位置和高程;
19、对靶标板的平面位置和高程数据进行解算和平差处理,获得靶标控制点的三维坐标。
20、进一步的,利用铁路中线和地形数据规划无人机平台的航线,具体包含以下步骤:
21、航线设计参数规划:根据机载雷达设备的扫描视场角fov,计算航线间距,确保航线间距覆盖铁路用地界外部分,同时,设置旁向重叠度p大于30%以确保点云密度;
22、航线间距d如下式所示:
23、
24、通过航线间距d计算飞行航高h,如下式所示:
25、
26、飞行航高h确定后,根据点云获取的密度,确定机载雷达设备的点频和线速度参数,以及无人机平台的飞行速度;
27、航带分区:根据铁路线路长度和无人机续航时间,将整个测量区域分为若干航带分区,确保每个分区能够在单次飞行中完成,且相邻分区之间有重叠区域以便数据拼接;
28、航线设计与仿地飞行:根据地形数据设计仿地飞行航线,以保证地面点云密度均匀;
29、对规划完成的航线进行安全性评估与导出。
30、进一步的,基站控制点架设若干gnss基站,相邻的gnss基站间距5~8km。
31、进一步的,基于靶标控制点的点云精化纠正:利用靶标控制点对初始点云数据进行纠正,以提升点云数据的绝对精度,具体包括:
32、靶标识别与初步校正:通过融合初始pos数据和点云数据来识别靶标的位置;如果点云数据中没有直接扫描到靶标中心,将基于靶标的轮廓计算出中心点的坐标,并将这一位置与最近的点云数据关联,赋予相应的gps时间戳;
33、pos轨迹线纠正:利用靶标在点云中的位置和控制网的已知坐标,对pos轨迹线进行反向纠正,以确保轨迹线与靶标控制网坐标一致;
34、高精度点云数据生成:使用纠正后的轨迹线重新与扫描数据进行融合解算,生成wgs84坐标系下的点云数据;
35、点云数据坐标转换:将点云数据从wgs84坐标系转换到工程独立坐标系,得到最终的高精度点云数据。
36、进一步的,线路测量要素信息提取中,提取中线测量信息包括:
37、根据轨道点云的形状和高程信息,在任一钢轨上指定起点,自动追踪钢轨轨面,得到轨道线的粗略线条。
38、以钢轨线条为参照,设置左右轨与参照线的距离,设置中线提取间距,进行钢轨截面剖切,将截面点云与标准钢轨截面尺寸进行配准,当匹配误差最小时,取标准钢轨踏面中心作为轨顶点,高程取轨顶点最近点云的高程,得到左、右钢轨的中心三维坐标;
39、中线平面为左、右钢轨中心的均值,中线高程取左右钢轨高程中的最小值,即获得线路的中线坐标。
40、进一步的,线路测量要素信息提取中,里程测量以中线测量成果为基础,从点云中永久构筑物作为起点,顺着中线推算,获得线路任意里程。
41、进一步的,复测要素成果的检核与整理中,通过计算轨距、高差检核剔除粗差或者错误点。
42、与现有技术相比,本发明的有益效果如下:
43、1.本发明方法采用的无人机非接触测量方法解决了传统铁路既有线复测的难题。该方法避免了人员直接上道作业,显著降低了安全隐患。由于不受列车运行时间(天窗时间)的限制,可以实现全天候作业,大幅提高勘测效率。特别是在当前列车运行速度不断提升的背景下,传统的上道测量方法越来越难以实施,而本发明方法提供了一种更优的技术解决方案;
44、2.本发明方法数据获取范围广泛,成本效益高。与传统复测方法相比,本发明可覆盖铁路线两侧约200米的宽广区域,获取的信息更全面。这种方法一次测量就能获取大范围内的详细数据,可供不同专业和需求多次利用,有效减少重复测量的必要性。因此,本发明不仅提高了数据获取的效率,而且大幅节约了人力和物力成本,尤其适用于变化频繁的勘测需求。
- 还没有人留言评论。精彩留言会获得点赞!