基于数字图像测量的连续梁桥挠度监测误差修正方法与流程
本发明涉及连续梁桥挠度监测方法,具体涉及一种基于数字图像监测的连续梁桥挠度监测误差修正方法。
背景技术:
1、桥梁的静动挠度反映桥梁结构整体竖向刚度,是桥梁结构状态评估和性能评价的重要指标,在桥梁健康监测中具有重要意义。目前国内现役公路桥梁数量已经超过100万座,其中连续梁桥凭借其支点负弯矩抵抗跨中正弯矩、自重轻、施工工艺成熟、整体性好、桥面伸缩缝少等优点,在公路桥梁中占有较大比重。然而,随着交通运输量和重载车辆的不断增多、材料性能劣化、养护不及时等问题的出现,已有相当一部分桥梁出现了混凝土开裂病害,例如顶板、底板、跨中腹板竖向、横向和斜向裂缝,导致结构整体竖向刚度不足,安全储备降低,因此准确、便捷的监测连续梁桥运营阶段静动挠度成为评价桥梁服役性能、及时提供结构安全预警的现实需求。目前连续梁桥静动挠度测量方法主要有位移计法、水准仪法、连通管法、gps法、毫米波雷达法等。
2、然而位移计需要安装在固定支架上才能使用,无法应用于横跨河流或深谷的桥梁;光学水准仪无法测量动挠度;连通管由于液体流动阻力导致监测实时性不足、且受量程限制无法适用于纵坡较大的大跨径桥梁;gps易受卫星钟差、卫星轨道误差、电离层误差等影响导致接收终端的定位精度难以保证长期稳定;毫米波雷达器件昂贵,难以大批量部署。
3、随着机器视觉、光电传感技术的发展,基于数字图像相关技术的桥梁静动挠度测量方法凭借其非接触、多点位同步监测、测量精度高和设备成本低的优点被逐步应用于桥梁结构位移的长期监测中。但是在实际应用中,通过对量大面广的连续梁桥的监测研究,发现基于数字图像相关的挠度监测方法仍存在如下不足:
4、目前在连续梁桥位移长期监测中,考虑到现场施工及后期设备维护条件,一般把图像挠度仪安装在中支点附近的箱室顶板,然后把目标靶分别布置到主跨的1/4、跨中、3/4箱室顶板,基准靶布置到对侧中支点附近的箱室顶板。然而变截面连续梁桥在车辆荷载作用下支点处会发生偏转,导致图像挠度仪(cmos)、目标靶、基准靶会发生一定的偏转和竖向变形,给测试结果带来误差。其中图像挠度仪和基准靶安装于中支点附近,竖向变形很小,主要是会产生俯角,对像点挠度测试精度产生影响,给挠度测试带来较大不确定性;尤其是当基准靶产生俯角时,难以对图像挠度仪进行修正,甚至带来反向误差。
5、上述问题,使得数字图像相关技术在挠度监测中难以充分发挥优势。
技术实现思路
1、针对现有技术中所存在的上述不足,本发明提出了一种基于数字图像测量的连续梁桥挠度监测误差修正方法,目的是消除基准靶带来反向误差的可能性,降低桥梁健康监测系统实施成本,提高了系统安装效率,为更加准确、可靠的进行连续梁桥健康度评估和安全预警提供数据支撑。
2、技术方案:一种基于数字图像测量的连续梁桥挠度监测误差修正方法,包括如下步骤:
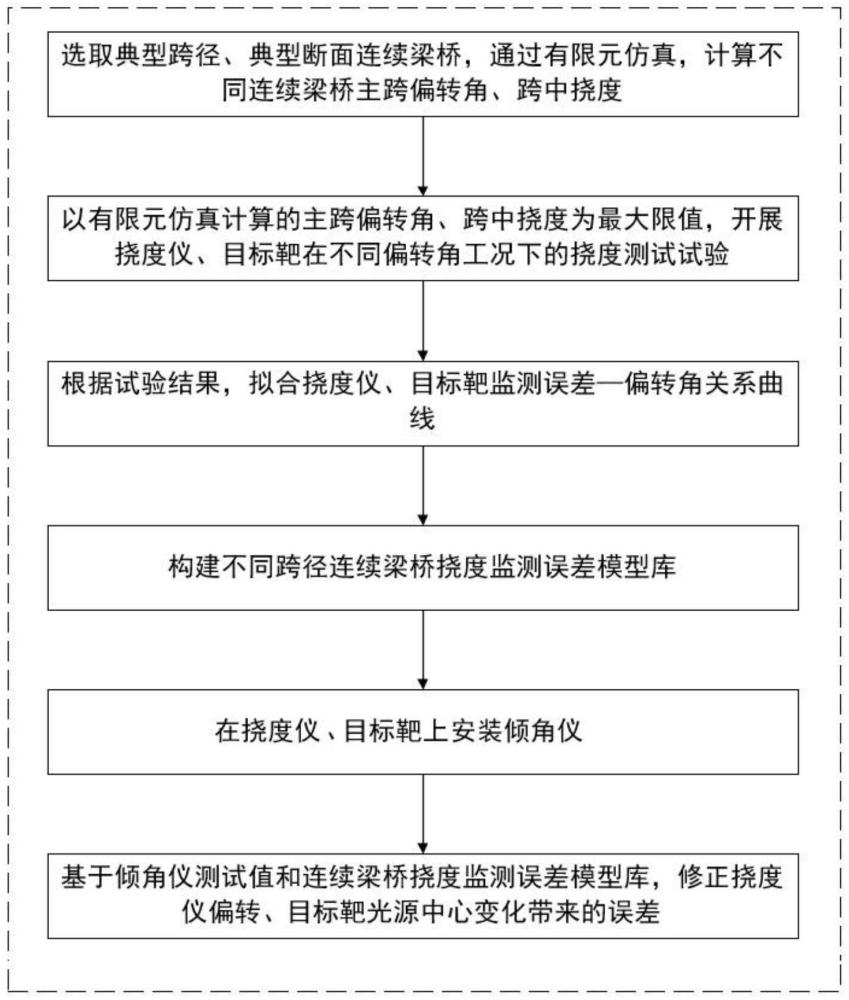
3、(1)选取典型跨径、典型断面连续梁桥,通过有限元仿真,计算不同连续梁桥主跨偏转角;
4、(2)有限元仿真计算的主跨偏转角为最大限值、最大挠度,进行图像挠度仪和/或目标靶在不同偏转角工况下的挠度测试试验;
5、(3)根据挠度测试试验结果,拟合挠度监测误差和偏转角的关系曲线,构建不同跨径连续梁桥挠度监测误差模型库,所述挠度监测误差是指挠度测量值偏离基准值的误差;
6、(4)在图像挠度仪和/或目标靶上安装倾角仪,所述倾角仪用于监测图像挠度仪和/或目标靶的偏转角;
7、(5)通过倾角仪确定偏转类型,基于偏转类型和倾角仪测试值,在连续梁桥挠度监测误差模型库中查询该偏转类型和倾角仪测试值对应的挠度监测误差,根据当前实测的跨中挠度,修正因图像挠度仪偏转和/或目标靶偏转产生的误差。
8、在其中一个实施例中,所述步骤(2)的挠度测试试验通过调整图像挠度仪和/或目标靶偏转角,实时记录各偏转角下的挠度测量值,将各偏转角下的挠度测量值和基准值作差,作为挠度误差值。
9、在其中一个实施例中,所述步骤(2)的挠度测试试验还包括目标靶竖向位移调整的步骤。
10、具体的,当挠度监测误差来源于挠度仪偏转时,挠度监测误差的计算过程如下:
11、定义目标靶成像高度为w1,目标靶高度为w2,焦距为f,目标靶距离图像挠度仪镜头的距离为l,挠度仪偏转导致的偏差为δh1;
12、图像二维像素坐标系与世界三维坐标系之间的映射关系如下式所示:
13、
14、式中,s表示比例因子;r表示旋转矩阵;t表示平移矩阵;u,v表示像素坐标;u0,v0分别表示图像的中心像素坐标和目标点像素坐标之间相差的横向和纵向像素数;α,β表示单位像素位移;xw,yw表示世界坐标;
15、将竖向像素偏差δh1代入式中,得到挠度仪偏转导致的偏差y1;
16、
17、y1即挠度仪偏转导致的挠度监测误差。
18、当挠度监测误差来源于目标靶偏转导致的光心偏转时,挠度监测误差的计算过程如下:
19、定义目标靶成像高度为w1,目标靶高度为w2,焦距为f,目标靶距离图像挠度仪镜头的距离为l,目标靶光源中心变化导致的竖向像素偏差为δh2;
20、图像二维像素坐标系与世界三维坐标系之间的映射关系如下式所示:
21、
22、式中,s表示比例因子;r表示旋转矩阵;t表示平移矩阵;u,v表示像素坐标;u0,v0分别表示图像的中心像素坐标和目标点像素坐标之间相差的横向和纵向像素数;α,β表示单位像素位移;xw,yw表示世界坐标;
23、将竖向像素偏差δh2代入式中,得到目标靶光源中心变化导致的偏差y2;
24、
25、y2即目标靶偏转导致的挠度监测误差。
26、当挠度监测误差来源于挠度仪偏转和目标靶偏转的结合时,挠度监测误差的计算过程如下:
27、定义目标靶成像高度为w1,目标靶高度为w2,焦距为f,目标靶距离图像挠度仪镜头的距离为l,挠度仪偏转导致的竖向像素偏差为δh1,目标靶光源中心变化导致的竖向像素偏差为δh2;
28、图像二维像素坐标系与世界三维坐标系之间的映射关系如下式所示:
29、
30、式中,s表示比例因子;r表示旋转矩阵;t表示平移矩阵;u,v表示像素坐标;u0,v0分别表示图像的中心像素坐标和目标点像素坐标之间相差的横向和纵向像素数;α,β表示单位像素位移;xw,yw表示世界坐标;
31、将竖向像素偏差δh1和δh2分别代入式中,得到挠度仪偏转和目标靶光源中心变化导致的偏差y1、y2;
32、
33、
34、挠度仪偏转和目标靶光源中心变化导致的挠度监测误差δh为
35、δh=y1+y2。
36、与现有方法相比,本发明具有以下有益效果:
37、1.以有限元仿真计算结果指导后续试验的工况设置,使得支点偏转角、跨中挠度的试验工况更有针对性;
38、2.通过挠度仪和靶标挠度测试试验,分析出相关误差的分布范围和分布规律,构建了不同跨径连续梁桥挠度监测误差模型库,基于倾角仪测试值和连续梁桥挠度监测误差模型库,实现了对挠度仪偏转和目标靶光源中心变化误差的修正,为提升图像挠度仪在连续梁桥静动挠度长期监测的可靠性提供支撑;
39、3.该修正方法不再依赖于基准靶,消除了基准靶带来反向误差的可能性,降低了靶标的安装数量和成本。
- 还没有人留言评论。精彩留言会获得点赞!