信号动态遮挡误差降低方法及系统与流程
本发明涉及可穿戴超宽带设备信号处理,具体涉及一种信号动态遮挡误差降低方法及系统。
背景技术:
1、随着物联网技术(internet of things,iot)的蓬勃发展,传感器设备在日常、工业等领域均得到了广泛的应用,多种室内定位方法被实践采用,比如wifi、蓝牙、uwb(ultrawide band,超宽带)及其他定位方法。其中,uwb是一种无线载波通信技术,因其高传输速度、低功耗、高精度和强抗干扰能力等特点,在室内定位、近场通信和物联网等领域受到广泛关注。
2、对于行人定位服务,基于uwb信号的行人定位系统在现有的射频技术中具有最高的定位精度。但在行人定位场景中,在非视距(non line of sight,nlos)情况下,行人的身体会阻挡可穿戴传感器与基站之间的直接路径,导致测距结果的大幅波动。所以目前面临的主要问题就是在定位系统中分析佩戴者对测距结果的影响。理论上,佩戴者对测距结果的影响可以分为两部分:行人自身的辐射和人体的特殊的组成结构的影响;人体阴影遮挡。实验表明人体对实验结果的影响几乎都来自与阴影效应。在近期的研究中,有研究者将在行车定位中考虑到的相对航向角(relative heading angle,rha)加入对行人测距模型中,为uwb佩戴式设备的定位引入了新的研究机遇。但是目前对行人定位的研究依旧存在很大的问题,比如研究者所提出的模型对不同场景适应性问题,定位训练/测试数据静态性等问题,其中,使得uwb定位研究进展缓慢地很大原因在于,研究者们大多都是对实验的总结分析,但是没有注意到相同的室内场景下,即使是相同的实验配置,都会出现实验场景不均匀性,从在这样的情况下得到的数据中总结出的结论总是有失偏颇。
3、因此,亟需一种对应用场景误差进行校正的方法来验证定位算法、模型的性能。
技术实现思路
1、本发明的目的是提供一种信号动态遮挡误差降低方法及系统,以解决目前缺少对应用场景误差进行校正、进而验证定位算法和模型性能的方法的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
3、信号动态遮挡误差降低方法,所述方法包括:
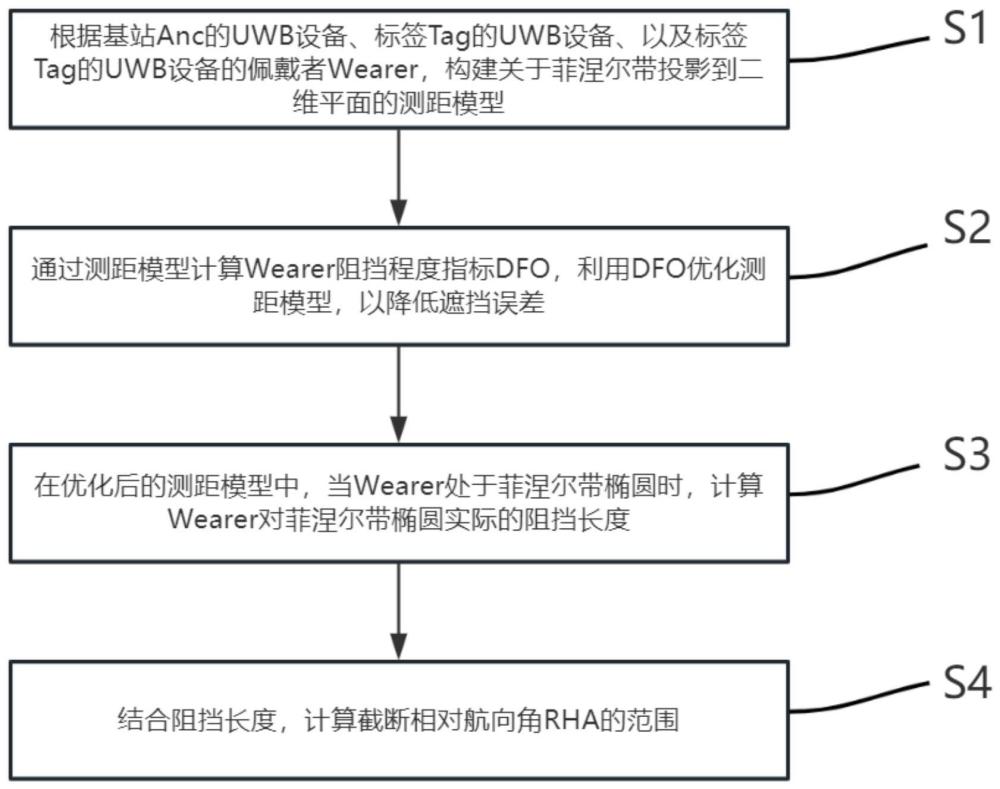
4、根据基站anc的uwb设备、标签tag的uwb设备、以及标签tag的uwb设备的佩戴者wearer,构建关于菲涅尔带投影到二维平面的测距模型;
5、通过测距模型计算wearer阻挡程度指标dfo,利用dfo优化测距模型,以降低遮挡误差;
6、在优化后的测距模型中,当wearer处于菲涅尔带椭圆时,计算wearer对菲涅尔带椭圆实际的阻挡长度;
7、结合阻挡长度,计算截断相对航向角rha的范围。
8、进一步地,根据基站anc的uwb设备、标签tag的uwb设备、以及标签tag的uwb设备的佩戴者wearer,构建关于菲涅尔带投影到二维平面的测距模型,包括:
9、以tag和anc的直连线中点为原点,建立直角坐标系;
10、将菲涅尔带椭圆的中心放在直角坐标系的原点,得到关于菲涅尔带投影到二维平面的测距模型;
11、在测距模型中,将tag和anc的直连线作为基线,将wearer等效为线段,wearer的中点对于基线的角度为相对航向角rha。
12、进一步地,通过测距模型计算wearer阻挡程度指标dfo,包括:
13、结合测距模型,计算第k个菲涅尔带椭圆与基线上任一点p之间的距离r;
14、计算wearer对第k个菲涅尔带椭圆实际的阻挡长度r’;
15、计算wearer阻挡程度指标dfo:
16、
17、进一步地,计算第k个菲涅尔带椭圆与基线上任一点p之间的距离r,包括:
18、
19、λ为uwb信号波长;
20、l1和l2分别为anc和tag到基线上任意点p的距离。
21、进一步地,计算wearer对第k个菲涅尔带椭圆实际的阻挡长度r’,包括:
22、
23、其中:
24、dw为wearer的长度;
25、d为wearer与tag的垂直距离;
26、φc为wearer与菲涅尔带椭圆的交点(x,y)和tag(xc,0)的连线与基线之间角度;
27、φc0为φc与rha相同时的边界取值;
28、φw为wearer两端与tag连线之间的角度。
29、进一步地,菲涅尔带椭圆选取第一个菲涅尔带椭圆。
30、进一步地,利用dfo优化测距模型,以降低遮挡误差,包括:
31、获取dfo的误差概率分布模型;
32、结合rha得到dfo的概率分布,通过dfo的概率分布得到一个随机数,该随机数为测距误差;
33、利用采集到的测距值减去测距误差,即为优化后的测距值。
34、进一步地,结合阻挡长度,计算截断相对航向角rha的范围,包括:
35、根据阻挡长度计算φc,并得到φc0;
36、当φc0-φw/2>0,wearer在菲涅尔带椭圆内部的rha范围为[φc0-φw/2,φc0+φw/2];
37、当φc0-φw/2≤0,wearer在菲涅尔带椭圆内部的rha范围为[0,φc0+φw/2]。
38、另一方面,提供信号动态遮挡误差降低系统,所述系统用于实施所述的方法,包括:
39、构建模块,用于根据基站anc的uwb设备、标签tag的uwb设备、以及标签tag的uwb设备的佩戴者wearer,构建关于菲涅尔带投影到二维平面的测距模型;
40、降低误差模块,用于通过测距模型计算wearer阻挡程度指标dfo,利用dfo优化测距模型,以降低遮挡误差;
41、阻挡长度计算模块,用于在优化后的测距模型中,当wearer处于菲涅尔带椭圆时,计算wearer对菲涅尔带椭圆实际的阻挡长度;
42、截断范围计算模块,用于结合阻挡长度,计算截断相对航向角rha的范围。
43、与现有技术相比,本发明的有益效果如下:
44、本发明提供了一种信号动态遮挡误差降低方法及系统,将tag(标签)和anc(基站)的uwb设备、佩戴者以及菲涅尔带投影到二维平面建立数学模型,根据可控变量,计算出模型中所有需要参数,并提出了一个对佩戴者阻挡程度的指标dfo(degree of fresnel zoneobstruction)。在室内场景中以不同rha、不同tag到anc之间的距离为实验变量,对模型加以验证。通过已有的实验数据,将dfo加入测距误差概率模型中,提出一种新的误差消除模型。并在相同场景下,采集新的数据集作为测试集,评估所提出模型的性能。并通过佩戴者在第一菲涅尔带中的模型,提出了在行人距离tag比较近且tag到anc之间的距离的情况下,tag到anc之间的距离对阻挡程度几乎没有影响。将所提出的测距模型应用到定位模型中,实施相应的定位实验,来验证定位算法性能,有效消减了定位过程中的误差。
- 还没有人留言评论。精彩留言会获得点赞!