用于航空事故调查的飞机着陆轨迹精确计算方法及系统与流程
本发明涉及航空事故调查数据处理领域,尤其涉及一种用于航空事故调查的飞机着陆轨迹精确计算方法及系统。
背景技术:
1、民用飞机的事故调查、安全管理业务中,需要对飞机在跑道区域的着陆轨迹进行精确分析,如飞机冲偏出跑道事故的轨迹分析、飞行员着陆动作评估(也需要着陆轨迹、地面滑行轨迹分析)等,这对飞机在跑到区域的轨迹数据提出了很高要求。当前能够实现飞行轨迹监视的技术主要包括机载导航监视设备和地面监视设备。主流机载导航监视技术,如ads-b(广播式自动相关监视)、qar(quick access recorder)、acars(飞机通信寻址与报告系统)等输出的轨迹信息均来源自机载gps设备,其设计侧重是对空监视,gps精度有限;尤其在跑道区域的飞机滑行阶段,受地形、障碍物影响,gps普遍存在误差增大、跳点漏点问题。地面监控设备包括机场场面监视雷达(smr)、视频监控等;smr投资较大,绝大多数机场没有配备,且易受机场杂波或其他信号干扰影响,对地面飞机的定位精度亦不够理想;视频监控会因视角、失真以及能见度影响,不能很好地用于精确计算飞机的轨迹。
2、因此,依靠现有机载及机场监视技术设备均难以满足飞机在机场跑道区域着陆轨迹的精确计算与分析的需求,这也一直是事故调查与安全管理业务中的痛点问题。
技术实现思路
1、本发明的目的在于解决背景技术所指出的技术问题,提供一种用于航空事故调查的飞机着陆轨迹精确计算方法及系统,能够为航空事故调查、滑行轨迹分析、飞行员着陆动作评估等工作提供精确轨迹计算的技术支持,提高了航空安全管理水平。
2、本发明的目的通过下述技术方案实现:
3、一种用于航空事故调查的飞机着陆轨迹精确计算方法,其方法包括:
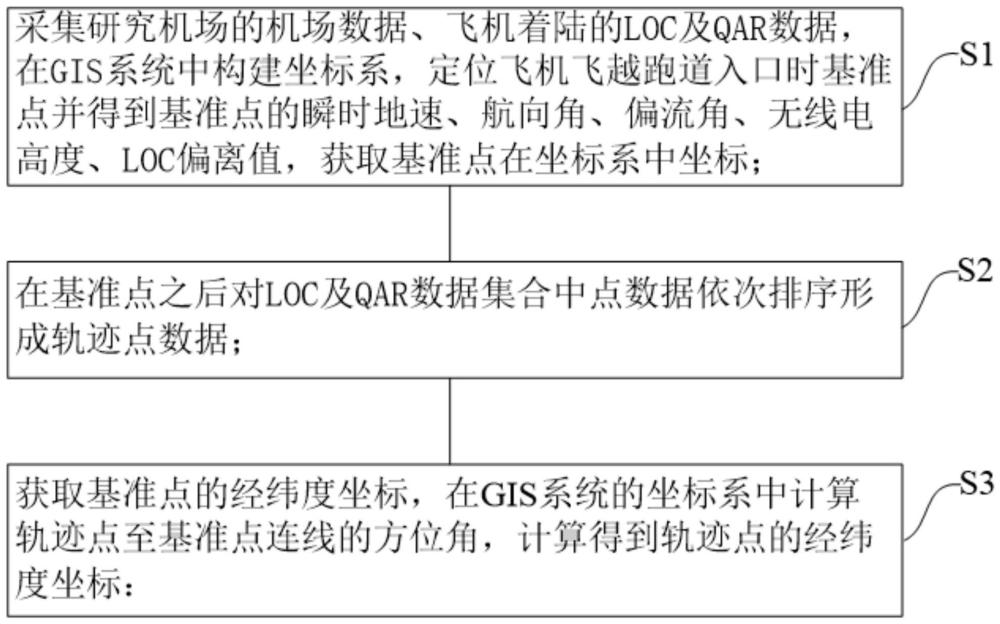
4、s1、采集研究机场的机场数据、飞机着陆的loc及qar数据,机场数据包括跑道入口中心点经纬度信息、跑道长度lr、宽度wr、跑道方向角θr,loc及qar数据集合为{pq1,pq2,…,pqm,…},其中第m个点数据pqm={gsqm,hdqm,θqm,tqm,locqm…},其中gsqm表示m点的瞬时地速,hdqm表示m点的航向角,θqm表示m点的偏流角,tqm表示m点的时间,locqm表示m点的loc偏离值;在gis系统中构建以跑道入口中心点为基准点p0、跑道中心线方向为x轴、垂直跑道中心线方向为y轴的坐标系,定位飞机飞越跑道入口时基准点p0并得到基准点p0的瞬时地速gs0、航向角hd0、偏流角θ0、无线电高度h0、loc偏离值loc0,基准点p0在坐标系中坐标记为(x0,y0);
5、s2、在基准点p0之后对loc及qar数据集合中点数据依次排序形成轨迹点数据,并记为:p1、p2、…、pm;
6、s21、以基准点p0的坐标计算后一个轨迹点p1的坐标:
7、计算轨迹点p1与基准点p0之间的坐标差值(δx1,δy1);
8、
9、deloc=lr+dloc,其中dloc表示航向信标台距跑道较近一端的距离,t1表示轨迹点p1的时间,t0表示轨迹点p0的时间,gs1表示轨迹点p1的瞬时地速,loc1表示轨迹点p1的loc偏离值;
10、由此得到轨迹点p1的坐标(x1,y1),x1=δx1+x0,y1=δy1+y0;
11、s22、以轨迹点p1的坐标计算后一个轨迹点p2的坐标:
12、计算轨迹点p2与基准点p1之间的坐标差值(δx2,δy2);
13、
14、δy2=(deloc-δx2)tan loc2;
15、其中t2表示轨迹点p2的时间,hd1表示轨迹点p1的航向角,θ1表示轨迹点p1的偏流角,gs2表示轨迹点p2的瞬时地速,loc2表示轨迹点p2的loc偏离值;
16、由此得到轨迹点p2的坐标(x2,y2),x2=δx2+x1,y2=δy2+y1;
17、按照步骤s22的方法以轨迹点p2的坐标计算后一个轨迹点p3的坐标,依次类推迭代处理,得到所有轨迹点的坐标;
18、s3、获取基准点p0的经纬度坐标(a0,l0),在gis系统的坐标系中计算轨迹点pm至基准点连线的方位角am,按照如下公式计算得到轨迹点pm的经纬度坐标(am,lm):
19、am=sin-1(sin a0 cosδd+cos a0 cos am)arcsin(sin a0 cosδd+cos a0 cos am其中,δd为pm与基准点之间的弧度距离;
20、由此计算得到所有轨迹点的经纬度坐标,然后得到从基准点之后各个轨迹点的飞机着陆经纬度数据集。
21、为了更好地实现本发明,进一步优选的技术方案是:在步骤s2中,通过插值法按照间隔时间t间隔在轨迹点数据进行插值处理得到插值点并作为新的轨迹点,按照步骤s22的方法计算得到插值点的坐标;按照步骤s3的方法计算得到所有插值点的经纬度坐标并依序归集于飞机着陆经纬度数据集中。
22、优选地,在步骤s1中,定位飞机飞越跑道入口时前后两个相邻点并记为pqz、pqz+1,两个相邻点分别包括瞬时地速、航向角、偏流角、无线电高度、loc偏离值,计算获得两个相邻点在x轴上的距离分别为dqz、dqz+1;按照如下公式得到基准点p0对应的瞬时地速gs0、航向角hd0、偏流角θ0、无线电高度h0、loc偏离值loc0:
23、
24、
25、
26、
27、
28、优选地,本发明还包括如下方法:计算得到研究机场的loc单位偏移量dot:设定飞机进近过程的loc偏离值判断范围为不大于2dot,利用loc偏离值判断范围对loc及qar数据集合中的loc偏离值进行判断,筛选超出loc偏离值判断范围的点数据进行标记处理。
29、优选地,所述loc及qar数据通过采集飞机着陆时飞机记载设备及机场地面设备按照loc及qar数据集合的格式存储。
30、一种用于航空事故调查的飞机着陆轨迹精确计算系统,包括数据采集模块、gis系统、轨迹点数据处理模块、轨迹点坐标处理模块和轨迹点经纬度坐标处理模块,所述数据采集模块用于采集研究机场的机场数据、飞机着陆的loc及qar数据,机场数据包括跑道入口中心点经纬度信息、跑道长度lr、宽度wr、跑道方向角θr,loc及qar数据集合为{pq1,pq2,…,pqm,…},其中第m个点数据pqm={gsqm,hdqm,θqm,tqm,locqm…},其中gsqm表示m点的瞬时地速,hdqm表示m点的航向角,θqm表示m点的偏流角,tqm表示m点的时间,locqm表示m点的loc偏离值;所述gis系统中构建有以跑道入口中心点为基准点p0、跑道中心线方向为x轴、垂直跑道中心线方向为y轴的坐标系,所述轨迹点数据处理模块内部包括定位飞机基准点模块,定位飞机基准点模块定位飞机飞越跑道入口时基准点p0并得到基准点p0的瞬时地速gs0、航向角hd0、偏流角θ0、无线电高度h0、loc偏离值loc0,基准点p0在坐标系中坐标记为(x0,y0);所述轨迹点数据处理模块在基准点p0之后对loc及qar数据集合中点数据依次排序形成轨迹点数据,并记为:p1、p2、…、pm;所述轨迹点经纬度坐标处理模块获取基准点p0的经纬度坐标(a0,l0),在gis系统的坐标系中计算轨迹点pm至基准点连线的方位角am,按照如下公式计算得到轨迹点pm的经纬度坐标(am,lm):
31、am=sin-1(sin a0 cosδd+cos a0 cos am)arcsin(sin a0 cosδd+cos a0 cos am其中,δd为pm与基准点之间的弧度距离;由此计算得到所有轨迹点的经纬度坐标。
32、优选地,所述轨迹点数据处理模块内部包括轨迹点插值模块,轨迹点插值模块通过插值法按照间隔时间t间隔在轨迹点数据进行插值处理新增轨迹点。
33、本发明较现有技术相比,具有以下优点及有益效果:
34、(1)本发明实现了飞机在跑道区域着陆过程(包括滑行阶段)的轨迹精确计算,解决了在事故调查分析、飞行员起降分析业务中对飞机着陆滑行轨迹精确定位手段缺失的技术难点,弥补了现行机载监视技术精度不够精确、场面监视手段覆盖范围不足的技术短板。
35、(2)本发明在多起国内飞机冲偏出跑道事件的实际调查中作中得到了应用验证,经与现场轮胎痕迹、参照物测量、视频资料对比后发现,计算轨迹结果与实际轨迹显示出较好的拟合度,在事故原因分析与安全管理工作中获得了显著的应用效益。
36、(3)本发明合理构建自定义坐标系,保证了计算的科学性与精度,同时也实现了标准经纬度坐标转换,保证计算结果能够应用于gis等标准化平台与多样化应用场景;本发明依赖的loc设备是民用机场的基础装备,qar数据则由机载标配设备输出,整个计算方法无需加装设备,不会产生额外成本,具有极好的推广性。
37、(4)本发明创造性地利用飞机在着陆过程中相对于loc的偏差值计算得到相对于跑道中线的偏转角度,再通过瞬时速度累加方法计算得到飞机相对于loc的直线距离,最后利用三角函数方法迭代计算得到飞机相对于跑道入口中心点的纵向距离与横向距离,从而确定飞机着陆下降轨迹以及在跑道上的滑行轨迹。本发明能够为航空事故调查、滑行轨迹分析、飞行员着陆动作评估等工作提供精确轨迹计算的技术支持,提高了航空安全管理水平。
- 还没有人留言评论。精彩留言会获得点赞!