基于单目视觉的低频线角加速度计灵敏度的动态校准方法与流程
本发明涉及一种低频线角加速度计灵敏度的动态校准方法,特别是一种基于单目视觉的低频线角加速度计灵敏度的动态校准方法。
背景技术:
1、线角加速度计以及由其构成的惯性测量单元(imu)广泛应用于航天器姿态估计、交通运行状态监控、风力发电安全监测及桥梁结构健康监测等领域的基本动态参数测量,其测量精度直接决定了工程应用质量,故通常在使用线角加速度计和imu前需要对其灵敏度进行校准。然而,目前用于确定线加速度计和角加速度计灵敏度的振动校准方法相互独立,难以建立统一的溯源体系。因此,研究一种高效率、高精度且有利于线角振动校准统一性的动态校准方法变得十分迫切。
技术实现思路
1、本发明的目的在于,提供一种基于单目视觉的低频线角加速度计灵敏度的动态校准方法。用于解决现目前线振动与角振动校准方法不完善,线角振动计量体系难以统一的问题。
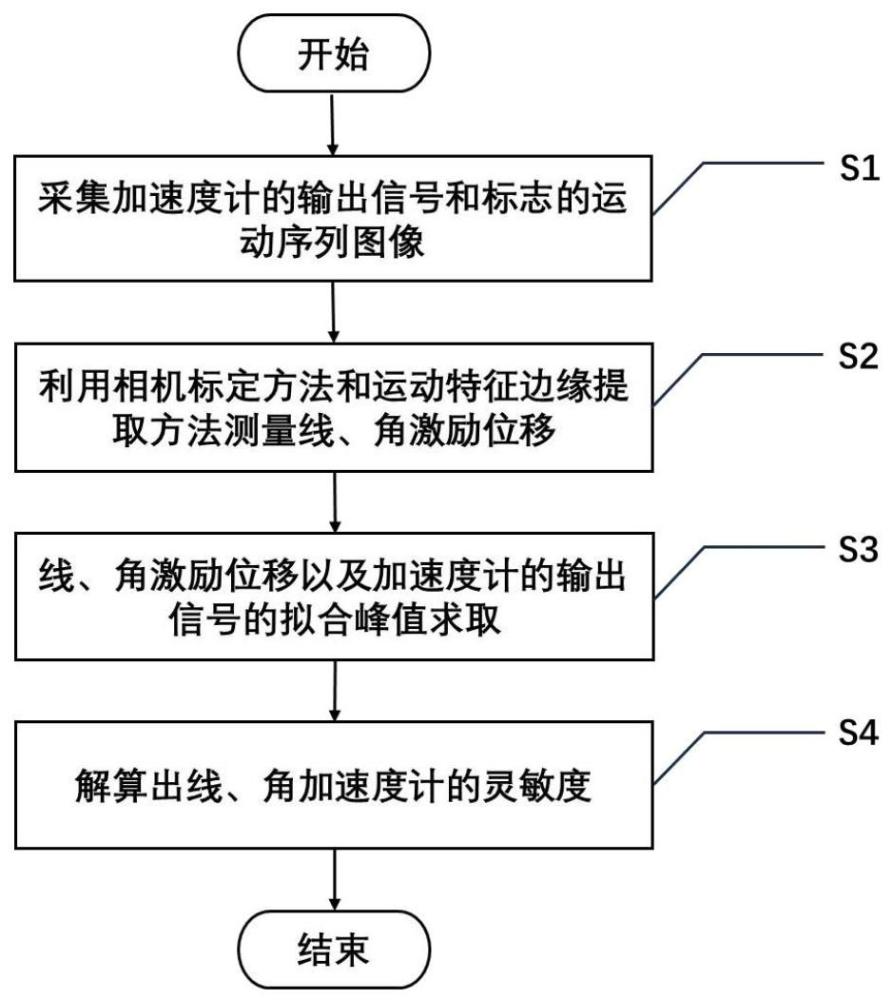
2、本发明的技术方案:基于单目视觉的低频线角加速度计灵敏度的动态校准方法,所述校准方法包括以下步骤:
3、步骤s1:将低频线角加速度计和高对比度标志紧固于激励发生装置的工作台面上,同时保证加速度计的灵敏轴方向与工作台面的运动方向一致,使标志、加速度计与工作台面具有一致的运动特性;通过控制激励发生装置产生不同频率的线角振动,为线角加速度计提供正弦激励;利用数据采集卡采集加速度计的输出信号,同时使用工业相机采集标志的运动序列图像;
4、步骤s2:通过棋盘格图像对工业相机进行标定,再通过模板匹配方法确定roi,采用基于nl-means降噪法和lr边缘增强法分别减少高斯噪声和运动模糊以得到精确的运动特征边缘,并通过lsd方法对运动特征边缘进行亚像素提取,从而实现不同频率下线角加速度计的线角激励位移测量;
5、步骤s3:利用sam方法分别拟合单目视觉法所测量的线角激励位移以及线角加速度计的输出信号,分别得到其峰值;
6、步骤s4:通过线角激励位移峰值与线角加速度计的输出信号峰值分别解算出线角加速度计的灵敏度,从而实现低频线角加速度计的灵敏度动态校准,并保存与显示线角加速度计的校准结果。
7、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,该方法所需装置包括:低频线角加速度计、高对比度标志、激励发生装置、工业相机、便携式计算机和数据采集卡;
8、将低频线角加速度计和高对比度标志紧固于激励发生装置的工作台面上,并使低频线角加速度计的灵敏轴方向与工作台面的运动方向一致;工业相机安装在激励发生装置上方,用于采集高对比度标志的运动序列图像,并将图像传输到便携式计算机;数据采集卡用于低频线角加速度计的输出电压信号采集,并传输给便携式计算机;便携式计算机分析与解算线角激励位移峰值以及输出电压信号的峰值,并保存和显示低频线角加速度计灵敏度的校准结果。
9、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,所述步骤s1中,激励发生装置为线角加速度计提供正弦激励,具体包括:采用正弦信号对加速度计进行激励,控制激励发生装置在0.1~1hz范围内产生不同频率的线角振动,测试频率点的选择按照1/3倍频程进行频率选取,每个频率点都需对加速度计的灵敏度进行10次校准;其中线角激励位移s(t)和r(t)可以描述为:
10、
11、其中,sp和rp分别为s(t)和r(t)的峰值;ωv为角频率;和分别是s(t)和r(t)的初始相位。
12、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,所述步骤s2中,不同频率下线角加速度计的线角激励位移测量,具体包括:
13、设每次校准实验中相机得到的运动序列图像为fi(x,y),i=1,2,…,m,其中下标i为第i帧图像,m为采集帧数,选择矩形的左右两条短边li,l,li,r作为第i帧标志图像fi(x,y)特征边缘;通过模板匹配方法确定由运动特征边缘所组成的roi,使用lr复原方法增强模糊图像的特征边缘:
14、利用fi(x,y)与参考图像灰度梯度差求得模糊核h(x,y),fi(x,y)在第一次迭代中对应的复原系数m(0)(x,y)可由以下公式求解:
15、
16、其中,为卷积;e为单位矩阵,角标t表示矩阵转置;然后,第一次迭代中的复原图像f(1)(x,y)可由以下公式求解:
17、f(1)(x,y)=gt(x,y)×m(0)(x,y) (3)
18、进一步,第一次迭代的模糊系数k(1)(x,y)可由以下公式求得:
19、
20、根据式(2)-(4),在n次迭代中最终得到的复原图像f(n)(x,y)可以描述为:
21、
22、并采用nl-means降噪方法以抑制振铃效应,该方法通过计算像素与周围领域像素之间的加权平均值,并判断像素之间的匹配度来保持lr复原图像的纹理细节及微弱边缘,其计算方法可由如下公式计算:
23、
24、其中,nlmeans(x,y)为正弦运动模糊复原图像的降噪图像,为i(x,y)中搜索窗口内像素的平均值;w(x0,y0,m0,n0)为搜索窗口内降噪像素(x0,y0)与比较像素(m0,n0)的纹理相似度,其表达式如下:
25、
26、其中n8(x0,y0)和n8(m0,n0)分别为搜索窗口内,降噪像素(x0,y0)与比较像素(m0,n0)的8邻域;a为平滑噪声系数;为降噪像素与比较像素两个8邻域对应的高斯加权欧氏距离,归一化系数z(x0,y0)表示为:
27、
28、根据式(2)-(8),可以得到边缘对比度较高的增强运动序列图像,采用lsd方法提取特征边缘,准确得到激励位移的运动序列图像的特征边缘li,l(x,y)和li,r(x,y)及其亚像素坐标,然后,根据由两个二阶径向畸变系数的非线性相机成像模型得到的单应性矩阵,将获得的亚像素坐标转换为对应的世界坐标,利用最小二乘法(lsm)拟合li,l(x,y)和li,r(x,y)的世界坐标进而得到边缘线li,l,li,r,将li,l,li,r与在工作台面处于零位时捕获的拟合边lr,l和lr,r比较得到相应的线角激励位移si,l、si,r和ri,l、ri,r,为了进一步消除随机误差,取si,l和si,r以及ri,l和ri,r的平均值作为该运动图像相应的线角激励位移。
29、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,所述步骤s3中,利用sam方法拟合运动序列图像的线角激励位移和
30、
31、其中,ti为fi(x,y)的采样时刻,as和bs以及ar和br分别为对应的正弦分量;cs和cr为超低频干扰分量;ds和dr是偏移分量;参数as、bs、cs和ds可以通过用最小二乘法求解超定方程得到,由下式计算出线角激励位移和对应的拟合峰值sp和rp:
32、
33、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,所述步骤s3中,在采集序列图像期间,数据采集卡同步采集加速度计的输出电压信号,并对信号进行处理,以获得输出信号的拟合峰值,具体包括:
34、(1)对于线加速度计,输出信号的拟合峰值vp可由以下sam公式确定:
35、v(tj)=avcos(ωvtj)-bvsin(ωvtj)+cvtj+dv (11)
36、其中,tj为采样时刻,v(tj)为此时刻的输出电压;参数av、bv、cv和dv可通过求解超定方程得到,则可由下式计算出vp:
37、
38、(2)角加速度计与线加速度计的输出信号不同,角加速度计的输出一般为数字角度,故采用下式进行拟合:
39、
40、其中,tk为采样时刻,为此时的输出角;参数aa、ba、ca和da可通过求解超定方程得到,进而由下式计算输出角的峰值
41、
42、前述的基于单目视觉的低频线角加速度计灵敏度的动态校准方法中,所述线角加速度计的灵敏度sl和sr,可根据iso的定义,由下式计算:
43、
44、其中,sp和rp为步骤s2中获得的线角激励位移幅值;
45、低频线加速度计的幅频响应可以通过校准不同频率下的灵敏度来确定,此外,采用下式的相对标准偏差sl,rstd来反映校准的可重复性:
46、sl,rstd=std.(sl)/ave.(sl)×100% (16)
47、其中std.(sl)和ave.(sl)是多次重复校准的对应标准偏差和平均值,角加速度计校准的可重复性同理。
48、本发明的有益效果:与现有技术相比,本发明提出了一种基于单目视觉的低频线角加速度计灵敏度的动态校准方法,首先,将如图4的高对比度标志与低频线角加速度计牢固于激励发生装置工作台面,且保证加速度计的灵敏轴方向与工作台面的运动方向一致。用于视觉测量的标志为四个圆形包络一个矩形所构成的图案,选择矩形的左右两条短边作为特征边缘。通过单目视觉方法对特征边缘位置的变化进行测量,以获取加速度计的线角激励位移。设置激励发生装置的振动频率,由激励发生装置向加速度计分别提供不同频率的线角正弦激励,测试频率点在0.1-1hz范围内按照1/3倍频程进行频率选取。为充分反映运动特性,相机采集5个运动周期的运动序列图像,设置相机采样率为激励频率的50倍,保证每个频率能采集250帧图像。规定激励发生装置的工作台面经过零位时,相机采集的图像为零位图像,选取零位图像作为运动序列图像的参考图像。为了消除外界光照、采集距离等因素影响,在提取运动特征边缘之前,通过模板匹配方法确定由运动特征边缘组成的roi,以保证可靠性。同时,采用基于nl-means降噪的lr边缘增强方法以减少运动模糊对图像质量的影响,然后采用lsd方法对特征边缘进行亚像素提取,准确得到反映激励位移的运动序列图像的特征边缘及其对应的亚像素坐标。选择具有两个二阶径向畸变系数的非线性相机成像模型,求解出能够表示世界坐标与像素坐标关系的单应性矩阵,从而将特征边缘的亚像素坐标转换为对应的世界坐标,并利用世界坐标得到相应的线角激励位移,进而采用sam方法拟合得到线角激励位移,得到其峰值。在采集运动序列图像期间,数据采集卡同时采集线角加速度计输出电压信号,通过sam法获得输出信号的拟合峰值。通过机器视觉方法测量在不同频率下线角加速度计的线角位移幅值以及加速度计的输出信号的拟合峰值进行灵敏度解算,求得线角加速度计灵敏度,完成对线角加速度计的校准。
49、本发明低频线角加速度计灵敏度动态校准方法具有如下优势:
50、(1)本发明方法提供了一种适用于线角加速度计灵敏度幅值校准的方法,该方法稳定、可靠且简便。
51、(2)本发明方法校准过程简单且高效,只需进行一次安装即可完成对线角加速度计的灵敏度幅值校准,极大地减小了传统方法中多次重复安装所引入的安装误差,且有效地提高了线角振动校准的统一性。
52、(3)本发明方法通过lr复原法及nl-means去噪法增强了运动序列图像的特征边缘,并采用lsd方法对特征边缘进行亚像素提取,确保了机器视觉方法的线角振动校准精度。
- 还没有人留言评论。精彩留言会获得点赞!