激光雷达的探测方法、激光雷达以及计算机存储介质与流程
本发明涉及光电探测领域,尤其涉及一种激光雷达的探测方法、激光雷达以及计算机存储介质。
背景技术:
1、激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。激光雷达因其分辨率高、隐蔽性好、抗有源干扰能力强、体积小及重量轻等优势,被广泛应用于自动驾驶等领域。具体地,激光雷达向周围的三维环境发射探测光束,探测光束在三维环境中的障碍物上发生反射形成回波,回波被接收后转换为电信号,激光雷达中的信号处理单元接收电信号并计算障碍物的特征信息,例如距离、方位以及反射率等。
2、图1示出了同轴收发系统的激光雷达示意图,激光雷达包括发射单元和接收单元,其中发射单元发出的探测光束l经过准直部件和分光部件,最后由扫描部件将探测光束l反射到激光雷达的外部,被障碍物反射的回波l`经由扫描部件、分光部件以及会聚部件后被接收单元接收。由图1可见,发射光路和接收光路存在共用部分。由于内部发射光路和接收光路无法做到完全隔离导致在激光雷达内部会有杂散光,例如发射单元中的激光器发射出的部分探测光束会入射到接收单元的探测器上形成杂散光,杂散光会导致激光雷达近距离的探测能力下降,会导致激光雷达存在近距离盲区。
3、图2示意图说明了激光雷达的杂散光如何影响近距离探测。如图2所示,当杂散光过强时,杂散光产生的回波信号与目标回波叠加导致无法识别出目标,即在杂散光持续时间内(t1-t2),如果有目标回波,目标回波会被杂散光回波掩盖而无法区分,同时会导致探测器的基线被短暂拉高,一段时间内激光雷达探测性能变弱,即近距离目标的回波波形会变弱,之后才能恢复探测能力。在此期间,激光雷达无法识别回波信号,从而形成近距离盲区。
4、背景技术部分的内容仅仅是公开发明人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
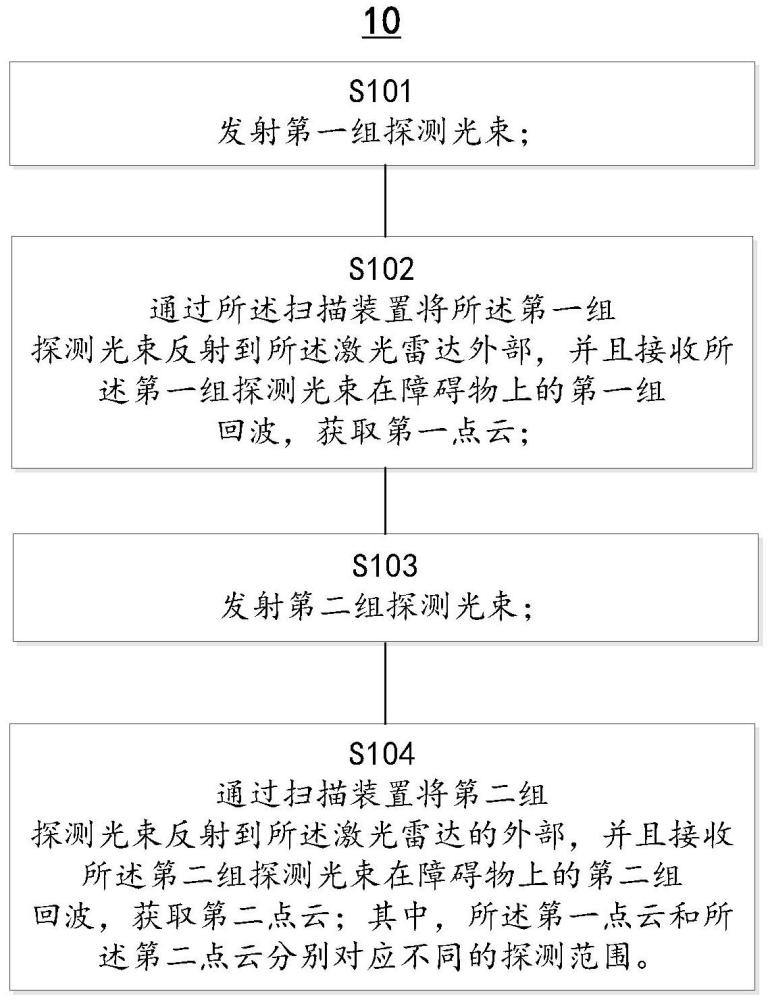
1、在现有的激光雷达同轴收发系统中,由于内部发射光路和接收光路无法做到完全隔离导致会有杂散光,而杂散光会导致近距离的探测能力下降,进而导致激光雷达存在近距离盲区。因此,本发明涉及一种激光雷达的探测方法,用于解决激光雷达存在近距离盲区的问题,所述激光雷达包括扫描装置,所述探测方法包括:
2、s101:发射第一组探测光束;
3、s102:通过所述扫描装置将所述第一组探测光束反射到所述激光雷达外部,并且接收所述第一组探测光束在障碍物上的第一组回波,获取第一点云;
4、s103:发射第二组探测光束;和
5、s104:通过所述扫描装置将所述第二组探测光束反射到所述激光雷达的外部,并且接收所述第二组探测光束在障碍物上的第二组回波,获取第二点云;
6、其中,所述第一点云和所述第二点云分别对应不同的探测范围。
7、根据本发明的一个方面,其中所述扫描装置包括至少一个第一反射面和至少一个第二反射面,所述步骤s102包括通过所述第一反射面将所述第一组探测光束反射到所述激光雷达外部并且接收所述第一组回波,所述步骤s104包括通过所述第二反射面将所述第二组探测光束反射到所述激光雷达外部并且接收所述第二组回波。
8、根据本发明的一个方面,其中所述第一反射面的有效反射面积大于所述第二反射面的有效反射面积。
9、根据本发明的一个方面,其中所述第一反射面和第二反射面的有效反射面积的比例根据所述第一点云和所述第二点云对应的探测范围的比例确定。
10、根据本发明的一个方面,其中所述步骤s102包括:控制所述扫描装置以第一转速转动;所述步骤s104包括:控制所述扫描装置以第二转速转动。
11、根据本发明的一个方面,还包括:根据所述激光雷达的探测场景或分辨率,调节所述第一转速和/或第二转速。
12、根据本发明的一个方面,所述激光雷达还包括光发射装置,其中所述步骤s101包括:控制所述光发射装置以第一功率发射第一组探测光束;所述步骤s103包括:控制所述光发射装置以第二功率发射第二组探测光束,其中,所述第一功率大于所述第二功率。
13、根据本发明的一个方面,其中所述第二功率是所述第一功率的1%-10%。
14、根据本发明的一个方面,还包括:根据探测结果动态调节所述第一组探测光束的发射重频和/或第二组探测光束的发射重频。
15、根据本发明的一个方面,其中所述探测结果包括:障碍物所在区域和/或感兴趣区域。
16、根据本发明的一个方面,所述激光雷达还包括光接收装置,其中所述步骤s102包括:所述光接收装置被施加第一偏置电压;所述步骤s104包括:所述光接收装置被施加第二偏置电压;其中,所述光接收装置在第一偏置电压下的探测性能高于在所述第二偏置电压下的探测性能。
17、根据本发明的一个方面,还包括:基于所述第一组探测光束的强度、第二组探测光束的强度、障碍物距离、障碍物反射率和最大探测距离中的一个或多个调节所述第一偏置电压和/或第二偏置电压。
18、根据本发明的一个方面,其中所述扫描装置包括多个第一反射面和多个第二反射面,所述探测方法还包括:将对应所述多个第一反射面分别获取的多个点云中的至少两个融合成所述第一点云,将对应所述多个第二反射面获取的多个点云中的至少两个融合成所述第二点云。
19、根据本发明的一个方面,还包括:
20、将所述第一点云与所述第二点云进行融合,获取所述激光雷达探测范围内的一帧点云。
21、根据本发明的一个方面,还包括:基于所述激光雷达的运动信息,将所述第一点云与所述第二点云进行时间同步,进而融合。
22、根据本发明的一个方面,还包括:从所述第一点云中筛选对应于所述第二点云的探测范围外的点与所述第二点云进行融合。
23、根据本发明的一个方面,还包括:将所述第一点云中对应于所述第二点云的探测范围内的点与所述第二点云进行融合。
24、本发明还涉及一种计算机存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如权利要求1-17中任一项所述的探测方法。
25、本发明还涉及一种激光雷达,包括:
26、光发射装置,包括至少一个激光器,配置为可分别发射探测光束;
27、光接收装置,包括至少一个探测器,配置为可分别接收所述探测光束在障碍物上的回波;
28、扫描装置,配置为将所述光发射装置发射的第一组探测光束反射到所述激光雷达外部,并且接收所述第一组探测光束在障碍物上的第一组回波;还配置为将所述光发射装置发射的第二组探测光束反射到所述激光雷达外部,并且接收所述第二组探测光束在障碍物上的第二组回波;
29、处理单元,耦接到所述光发射装置和所述光接收装置,配置为根据所述第一组回波获取第一点云,根据所述第二组回波获取第二点云;
30、其中,所述第一点云和所述第二点云分别对应不同的探测范围。
31、根据本发明的一个方面,其中所述扫描装置包括至少一个第一反射面和至少一个第二反射面,通过所述第一反射面将所述第一组探测光束反射到所述激光雷达外部并接收所述第一组回波,通过所述第二反射面将所述第二组探测光束反射到所述激光雷达外部并接收所述第二组回波。
32、根据本发明的一个方面,其中所述第一反射面的有效反射面积大于所述第二反射面的有效反射面积。
33、根据本发明的一个方面,其中所述处理单元配置为执行如上所述的探测方法,以获取第一点云和第二点云并融合为一帧点云。
34、本发明的技术效果可概括如下:
35、(1)获取不同探测范围的点云,基于后处理算法并结合激光雷达的运动信息,将不同探测范围的点云进行融合以解决近距离盲区的问题;
36、(2)进一步通过控制激光器的光强和探测器的偏置电压来抑制杂散光,避免无法识别近距离目标回波的问题;
37、(3)进一步通过调节电机转速和调节发射重频以实现自由调控不同探测范围的分别率,改变特定区域的分辨率。
- 还没有人留言评论。精彩留言会获得点赞!