一种钢结构桥箱U形肋与桥面板焊缝残余应力与疲劳裂纹无人机红外成像扫查方法
本发明属于焊缝残余应力与疲劳裂纹检测的,尤其涉及一种钢结构桥箱u形肋与桥面板焊缝残余应力与疲劳裂纹无人机红外成像扫查方法。
背景技术:
1、钢结构桥梁箱梁由多个u形肋和桥面板焊接而成,工况复杂,长期受周期性交通荷载影响,焊缝处应力环境十分严苛。焊缝处的内部应力状态不容易被有效检测,但其质量直接影响整体结构的安全性和使用寿命。手工方法很难检查箱梁内部所有焊缝质量。
2、申请号为cn202010382743.5的专利公开了一种钢桥疲劳裂纹监测装置及方法,该方案利用一套滑动导杆和监测机构保证tofd探头与钢板接触,基于超声波衍射时差法(tofd)通过利用声波在试件内部缺陷的“端角”和“端点”处发出的衍射波来监测疲劳缺陷;申请号为cn202210143893.x的专利公开了一种正交异性钢桥面板疲劳裂纹组合式监测方法及系统,该方案通过组建正交异性钢桥面板足尺节段模型,获取模型的应力幅变化信息、声发射信号信息和图片信息,通过相应位置的应力幅变化、声发射信号和图片信息判断确定结构起裂位置以及起裂时间和裂纹走向。但上述方法和装置只能监测预置位置的裂纹,针对长距离、大规模的钢桥难以实现全面监测和整桥全覆盖扫描,且受桥梁类型、结构和场地限制,上述方法只能检测固定部位确定类型的裂纹。
技术实现思路
1、基于以上现有技术的不足,本发明所解决的技术问题在于提供一种钢结构桥箱u形肋与桥面板焊缝残余应力与疲劳裂纹无人机红外成像扫查方法,对整个桥面和桥箱所有焊缝进行扫描,实现钢结构桥箱u形肋与桥面板焊缝疲劳裂纹的红外检查和焊缝残余应力的检测。
2、为了解决上述技术问题,本发明通过以下技术方案来实现:
3、本发明提供一种钢结构桥箱u形肋与桥面板焊缝残余应力与疲劳裂纹无人机红外成像扫查方法,包括以下步骤:
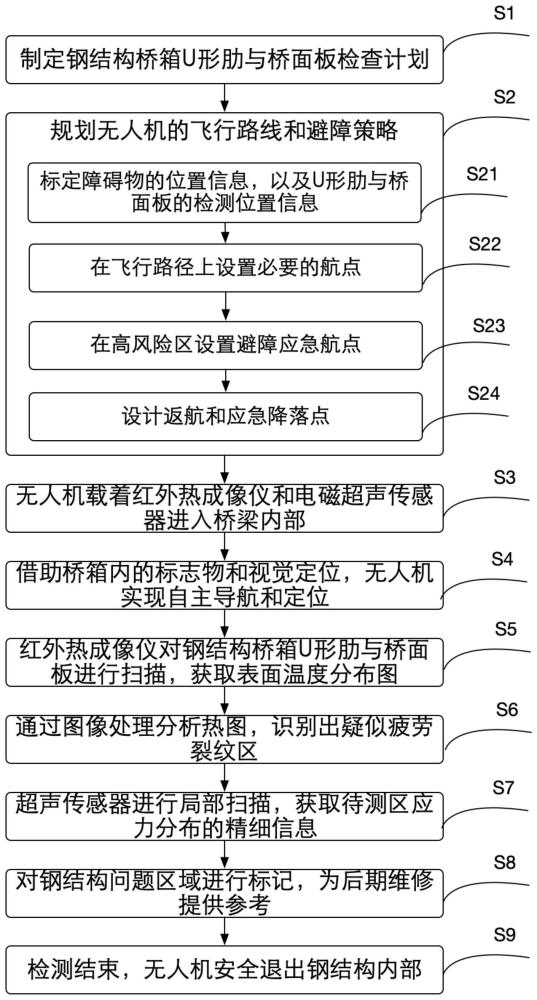
4、s1:制定钢结构桥箱u形肋与桥面板检查方案,确定需要检查的焊缝部位和焊缝的数量;
5、s2:规划无人机的飞行路线和避障策略;
6、s3:无人机载着红外热成像仪和电磁超声传感器进入桥梁内部;
7、s4:借助桥箱内的标志物和视觉定位,无人机实现自主导航和定位;
8、s5:红外热成像仪对钢结构桥箱u形肋与桥面板进行扫描,获取热图;
9、s6:通过图像处理分析热图,识别出疑似疲劳裂纹区;
10、s7:电磁超声传感器进行局部扫描,获取待测区应力分布的精细信息;
11、s8:对钢结构问题区域进行标记,为后期维修提供参考;
12、s9:检测结束,无人机安全退出钢结构内部。
13、由上,基于无人机的红外热成像技术可以对箱梁内部焊缝进行快速扫描,获得高分辨热图,通过图像处理分析热图特征,找出疲劳裂纹区,利用电磁超声应力检测技术可以实现不接触u形肋和桥面板的条件下完成构件内部残余应力的检测,通过两种技术的结合可以实现焊缝质量的全面自动化检测,解决目前钢结构桥梁箱梁焊缝质量检测效率低下的难题。本发明可充分发挥无人机在复杂空间的作业优势,与红外成像、图像处理等技术相结合,实现钢桥结构重要部位的关键信息检测,大大提升钢桥养护水平。
14、可选的,在步骤s2中,还包括:
15、步骤s21:标定障碍物的位置信息,以及u形肋与桥面板的检测位置信息;
16、步骤s22:在无人机的飞行路径上设置必要的航点,指引无人机按照规划路线飞行;
17、步骤s23:在高风险区设置避障应急航点,以应对偏离路径的情况;
18、步骤s24:设计返航和应急降落点,保障返航安全。
19、由上,在飞行路径规划步骤中,设置必要的航点、避障应急航点以及返航和应急降落点,可以指引无人机按照优化的飞行路线进行扫查,避开桥梁内部的障碍物,保证扫查质量;同时预先规划好应急避障和降落方案,可以应对飞行过程中的突发情况,确保返航安全,保障设备与人员的安全。
20、进一步的,所述红外热成像仪和电磁超声传感器进入桥梁内部对待测部位进行疲劳裂纹检查和残余应力检测。
21、由上,采用无人机搭载红外热成像仪和电磁超声传感器进入桥梁内部进行检测,相比于传统人工方式,可以实现对桥梁内部各处疲劳裂纹和残余应力的全面自动化检测,大大提高了检测的效率。
22、进一步的,所述无人机具备无线通信功能,可与地面站形成网络,地面站可以实时接收和处理无人机发送的检测图像、视频、热成像等多模式数据。
23、由上,无人机具备无线通信功能,可以与地面站实时网络化,实现对检测数据的即时传输。地面站收到各类图像、视频、热成像等多模式数据后,利用地面站更强大的计算机处理能力,可快速判断桥梁结构的安全状态,可以立即对数据进行处理和分析,实现对检测结果的实时评估。
24、进一步的,所述地面站至少包括计算机、数据终端、通信设备的硬件设备和软件系统,以接收和解析来自无人机的多模式数据以及对无人机的远程监控和指令下达。
25、由上,地面站通过必要的硬件设备与软件系统,实现对无人机的数据接收与指令下达。硬件设备包括计算机、数据终端、通信设备等,用于接收和存储多源数据;软件系统可以解析各类数据并对无人机进行远程监控和控制。
26、可选的,所述软件系统具有疲劳裂纹检出报警和热图疲劳裂纹特征标记功能,当识别到疑似疲劳裂纹区时,自动生成损伤预警,预警信息定位置显示在热图图像上并指示出现疑似疲劳裂纹位置。
27、由上,软件系统具备自动化的疲劳裂纹检测及预警功能。当系统识别出疑似疲劳裂纹区时,能够自动生成损伤预警信息。该预警信息会定位置显示在热图图像上,明确指示出疑似裂纹的位置。
28、可选的,在步骤s6中,采用被动式疲劳裂纹检查方法,通过钢结构桥箱u形肋与桥面板试件自身的红外辐射转化为电信号以获得热图。
29、由上,该方法采用了被动式的红外检测技术,通过检测结构自身的红外辐射获取热图,实现对疲劳裂纹的检查。
30、在步骤s6中,所述图像处理包括对所述热图进行去噪和增强对比度以提高所述热图的图像质量,对热图的温度差异显著区域进行标记,以便于疲劳裂纹特征识别。
31、由上,在处理获取的热图图像时,进行去噪和对比度增强,以提高热图质量;同时标记出温差显著区域,以助于后续的疲劳裂纹识别。
32、可选的,在步骤s6中,根据图像处理后的热图的热差区域的形状、温度参数判断损伤类型,进而完成疲劳裂纹区的识别。
33、由上,根据图像处理优化后的热图,通过分析温差区域的形状和温度参数,完成对疲劳裂纹区域的识别。
34、可选的,采用电磁超声残余应力检测方法,在与钢结构桥箱u形肋与桥面板试件有一定“提离”距离时,依然可以完成待测区域的残余应力检测。
35、由上,该方法使用了电磁超声传感器作为激励源,即使在非接触的情况下,也可以产生强大的声波激励信号。
36、本方法适用范围包括但不限于如下范围:各类钢结构桥箱u形肋与桥面板的疲劳裂纹检查和残余应力扫查检测方法,其他大型钢结构的疲劳裂纹检查和残余应力检测也可以参照使用。本方法具有操作简单、成本低、能耗小等优点,适用于桥梁、船舶等领域各类大型钢结构无损、高效的疲劳裂纹检查和残余应力检测。
37、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下结合优选实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!