一种多模态融合导航方法与流程
本发明属于导航,特别是全向移动设备的导航和定位技术。
背景技术:
1、在全向移动设备的领域,现有技术在导航和定位方面取得了一定的进展。
2、其中,以下是一些主要的现有同类产品信息:
3、slam导航系统:slam(simultaneous localization and mapping)系统已经广泛用于移动机器人和全向移动设备中。这些系统使用激光雷达或摄像头等传感器来构建实时地图并进行定位。例如,clearpath robotics的husky移动机器人使用了slam技术来实现自主导航。
4、轨道导引系统:在一些特定场景中,轨道导引系统被广泛应用,如自动化工厂和仓储系统。这些系统依赖于预先布置的导轨和传感器来引导设备移动。
5、gps导航技术:全球定位系统(gps)广泛应用于室外导航,但在室内或遮挡物较多的环境中效果受限。
6、尽管现有技术在导航领域取得了进展,但仍然存在一些不足之处:slam系统的性能受到以下因素影响:传感器性能,算法复杂度,环境条件,通常为了确保安全性和准确性,设备的运动速度相对较低。轨道导引系统需要在使用场景中布置大量的基础设施,且只能按照预先布置的轨道运行,限制了其适用性。gps在室内环境或高楼大厦周围的定位精度不够高。
7、因此,亟需开发新的导航方式和方法以适应全向移动设备的使用需求。
技术实现思路
1、本发明所要解决的技术问题在于提高全向移动设备的导航性能和运行速度。
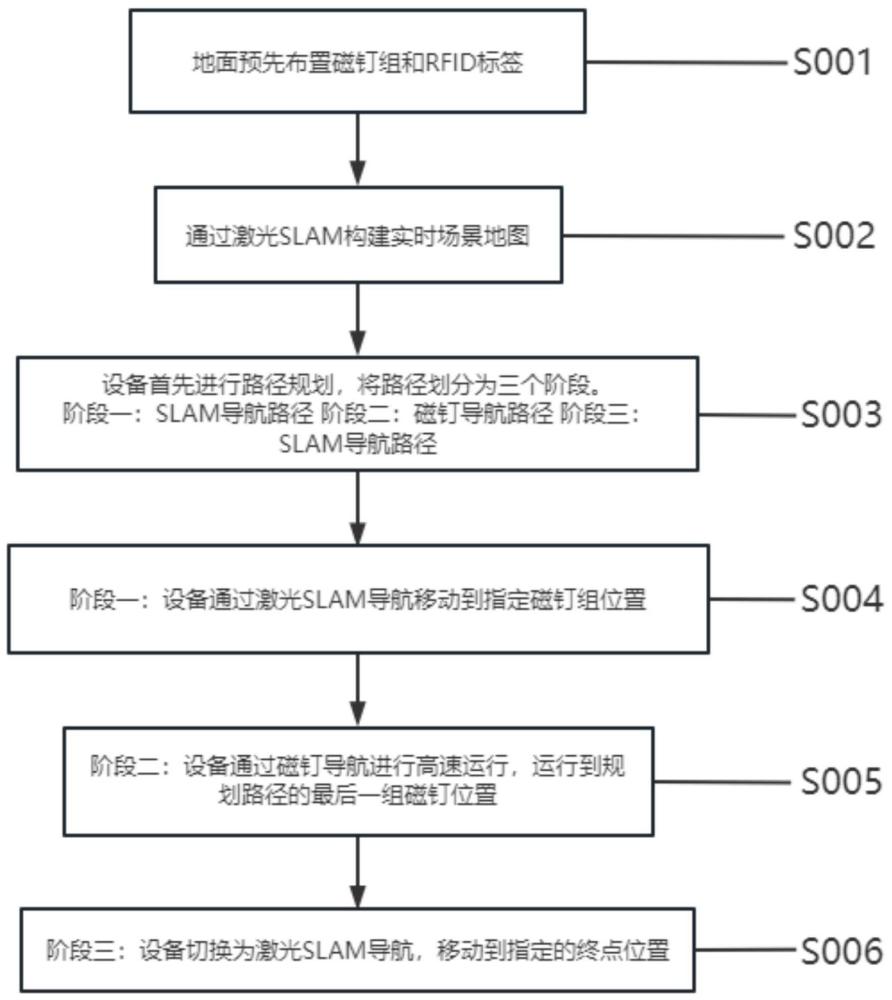
2、本发明提供了一种多模态融合导航方法,所述的多模态融合导航方法包括:步骤s001:预先在地面布置磁钉组和rfid标签,磁钉组和rfid标签是一一对应关系,记录rfid标签在场景中的位置信息;
3、步骤s002:通过激光slam构建实时场景地图;
4、步骤s003:设备在获取运动的终点位置后,进行路径规划,包括slam导航路径和磁钉组导航最短路径;
5、步骤s004:设备通过激光slam导航到达起始磁钉组位置;
6、步骤s005:设备通过磁钉导航到达终点磁钉组位置;
7、上述步骤不必然依次发生。
8、rfid是radio frequency identification的缩写,即射频识别,是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象,可快速地进行物品追踪和数据交换。
9、优选地,步骤s001中,每个rfid标签都带有唯一的标识和位置信息。
10、优选地,步骤s003中,规划的路径包括以下三个阶段中的一个或者多个:
11、阶段一:设备从起始位置到起始磁钉组;如果设备起始时已经在磁钉组位置,阶段一路径可以直接跳过;
12、阶段二:已知设备的终点位置,获取离终点最优的磁钉组位置,定义为终点磁钉组,规划起始磁钉组到终点磁钉组的最短路径,作为阶段二的路径;
13、阶段三:设备从终点磁钉组到终点位置的路径;如果设备终点在磁钉组位置,阶段三可以直接跳过。
14、优选地,步骤s004中,设备通过激光slam导航到达指定的磁钉组位置。设备对角设置两个270°激光雷达,激光雷达通过扫描周边环境,进行机器人所在位置的预定位,或者与系统内预设的地图信息匹配进而确定设备所在的坐标位置。
15、优选地,设备在运行过程中如遇到障碍物,设备将停止磁钉导航,切换为激光slam导航,重新规划slam导航路线,运动到终点位置。
16、优选地,所述的多模态融合导航方法包括步骤s006:设备通过激光slam导航运行阶段三的路径,到达指定的终点位置。
17、本发明的多模态融合导航方法,可以依靠磁钉导航在高速度场景下的高精度定位,结合激光slam导航的环境感知能力,进行融合导航;
18、当设备查找到磁钉组时,规划磁导航路径,提高设备运行速度,如果在磁导航过程中遇到障碍物,则自动切换为slam导航,重新规划路线;
19、当设备找不到磁钉组时,通过slam确定设备位置,规划slam导航路径到最优的磁钉组位置。
20、本发明还提供了一种多模态融合导航系统,所述的多模态融合导航系统包括磁导航仪、rfid读卡器、激光雷达、避障雷达、imu惯导模块、全向驱动轮组、角度编码器、里程计;
21、磁导航仪:在设备底部安装三个磁导航仪,分布在小车中轴线上,通过三个磁导航仪读取的磁钉数据,获取设备精确的水平和角度偏移;
22、rfid读卡器:通过读取预设的rfid标签,确定设备在环境中的绝对位置;
23、激光雷达:在设备对角处安装两个激光雷达,为设备提供360°的环境数据;
24、避障雷达:用于设备在运动过程中规避障碍物,保证设备运动的安全性;
25、imu惯导模块:安装在设备中心位置,提供设备的加速度,角度等信息,提高磁导航和slam导航的精度;
26、全向驱动轮组:设备底部安装四个全向驱动轮组,全向驱动轮组允许设备在各种方向上自由运动,包含角度编码器和里程计;
27、角度编码器提供可靠的角度数据,用于轮组角度方向的定位;
28、里程计用于计算轮组运动的里程信息,最终得到设备的运行距离,结合磁导航和slam导航的数据,计算出精确的设备位置信息。
29、本发明的有益效果包括:
30、一、提高运行速度。充分利用磁钉导航的高速度匹配能力,显著提高了设备的运行速度。
31、二、高精度导航。利用磁钉导航的绝对位置信息和slam导航的环境感知,实现高精度的自主导航和定位,避免误差积累问题。
32、三、适用性广泛。适用于各种导航场景,提供更大的灵活性和适应性。
33、四、施工周期短。相较于需要大规模基础设施改动的导引系统,该方法只需要在使用场景中布置磁钉和rfid标签,施工周期短,减少了额外成本和工程。
技术特征:
1.一种多模态融合导航方法,其特征在于,所述的多模态融合导航方法包括:步骤s001:预先在地面布置磁钉组和rfid标签,磁钉组和rfid标签是一一对应关系,记录rfid标签在场景中的位置信息;
2.根据权利要求1所述的多模态融合导航方法,其特征在于,步骤s001中,每个rfid标签都带有唯一的标识和位置信息。
3.根据权利要求1所述的多模态融合导航方法,其特征在于,步骤s003中,规划的路径包括以下三个阶段中的一个或者多个:
4.根据权利要求1所述的多模态融合导航方法,其特征在于,计算起始位置周边最优的起始磁钉组,已知起始位置的坐标,取起始位置周边的磁钉组,分别计算这些磁钉组和点a所连成的直线在直角坐标系中与x轴正方向所成夹角的角度θ;
5.根据权利要求1所述的多模态融合导航方法,其特征在于,步骤s004中,设备对角设置两个270°激光雷达,激光雷达通过扫描周边环境,进行机器人所在位置的预定位,或者与系统内预设的地图信息匹配进而确定设备所在的坐标位置。
6.根据权利要求1所述的多模态融合导航方法,其特征在于,设备在运行过程中如遇到障碍物,设备将停止磁钉导航,切换为激光slam导航,重新规划slam导航路线,运动到终点位置。
7.根据权利要求3所述的多模态融合导航方法,其特征在于,所述的多模态融合导航方法包括步骤s006:设备通过激光slam导航运行阶段三的路径,到达指定的终点位置。
8.根据权利要求1-7中任意一项所述的多模态融合导航方法的应用,其特征在于,依靠磁钉导航结合激光slam导航的环境感知能力,进行融合导航。
9.根据权利要求8所述的应用,其特征在于,当设备查找到磁钉组时,规划磁导航路径,提高设备运行速度,如果在磁导航过程中遇到障碍物,则自动切换为slam导航,重新规划路线;
10.一种多模态融合导航系统,其特征在于,所述的多模态融合导航系统包括磁导航仪、rfid读卡器、激光雷达、避障雷达、imu惯导模块、全向驱动轮组、角度编码器、里程计;
技术总结
本发明属于导航技术领域,涉及多模态融合导航方法,包括:步骤S001:预先在地面布置磁钉组和RFID标签,磁钉组和RFID标签是一一对应关系,记录RFID标签在场景中的位置信息;步骤S002:通过激光SLAM构建实时场景地图;步骤S003:设备在获取运动的终点位置后,进行路径规划,包括SLAM导航路径和磁钉组导航最短路径;步骤S004:设备通过激光SLAM导航到达起始磁钉组位置;步骤S005:设备通过磁钉导航到达终点磁钉组位置;步骤S006:设备从终点磁钉组位置通过激光SLAM导航到达终点位置。本发明的方法提高了运行速度,导航精度高,适用性广泛,施工周期短,成本相对低廉。
技术研发人员:袁全桥,李洋
受保护的技术使用者:上元立交(上海)科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!