一种基于空间定位的电子导航引导图生成方法和系统与流程
本发明涉及空间定位导航相关,具体是一种基于空间定位的电子导航引导图生成方法和系统。
背景技术:
1、空间定位技术当前具有较多的实现方式,包括卫星定位、基站定位以及uwb定位等多种定位方式,且均在不同的使用场景下具有着一定的使用优势,而对于部分不具有额外定位设备辅助的场景中,这些定位方式的实现则较为困难。
2、例如在地下、洞穴以及无人区的探索或救援中,上述的多种定位方式则难以有效的实现其作用,现有技术中,对于这种场景下,可以使用的有惯性导航系统,因其具备自主导航能力的系统,既不需要外界信号,也不需要连续接收外部信号,但惯性导航系统在使用中存在误差逐渐累积的问题,而这类场景下,缺乏基站等具有精准定位点位的系统进行辅助定位修正,因此长时间的误差积累容易导致相关人员对作业安全的误判。
技术实现思路
1、本发明的目的在于提供一种基于空间定位的电子导航引导图生成方法和系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于空间定位的电子导航引导图生成方法,包含步骤:
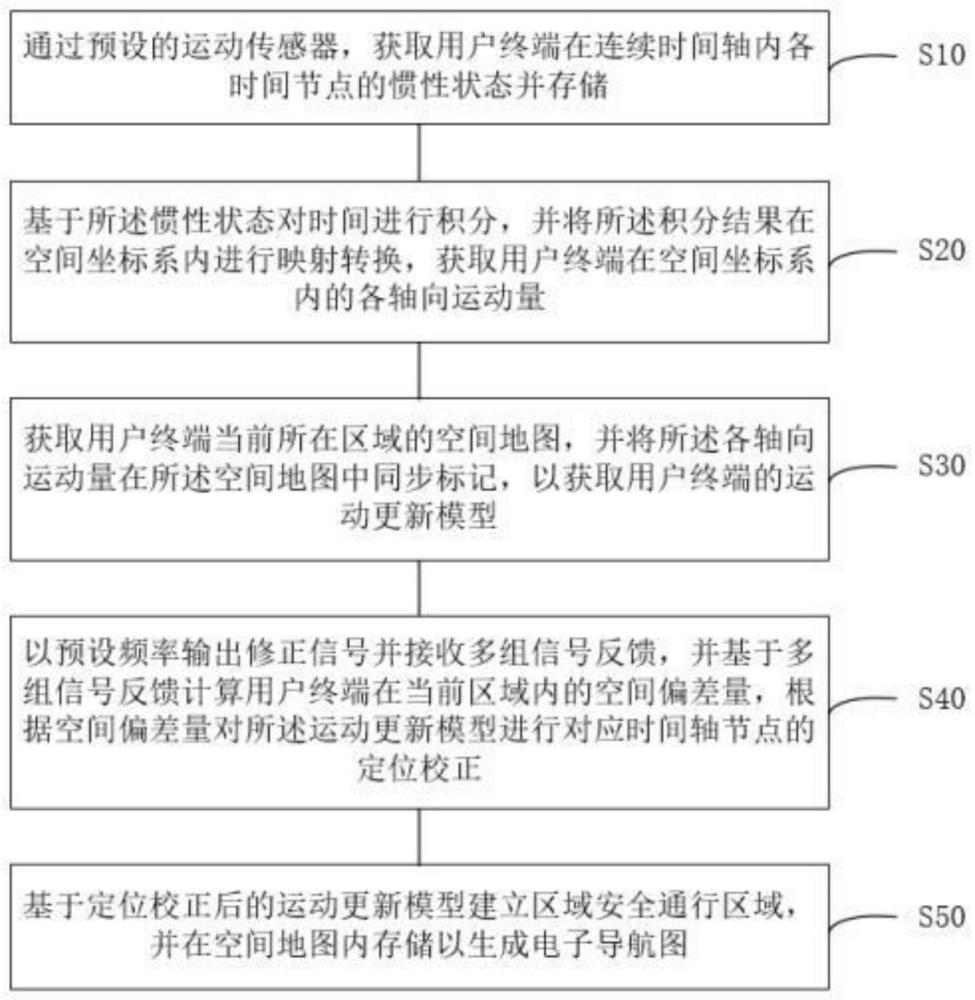
4、通过预设的运动传感器,获取用户终端在连续时间轴内各时间节点的惯性状态并存储,所述惯性状态表征用户终端在惯性参考系内某一时间节点的加速度信息,所述惯性状态为空间向量参数;
5、基于所述惯性状态对时间进行积分,并将所述积分结果在空间坐标系内进行映射转换,获取用户终端在空间坐标系内的各轴向运动量;
6、获取用户终端当前所在区域的空间地图,并将所述各轴向运动量在所述空间地图中同步标记,以获取用户终端的运动更新模型,所述运动更新模型用于表征用户终端在时间轴各节点的空间定位;
7、以预设频率输出修正信号并接收多组信号反馈,并基于多组信号反馈计算用户终端在当前区域内的空间偏差量,根据空间偏差量对所述运动更新模型进行对应时间轴节点的定位校正,所述空间偏差量用于表征修正信号在区域多组边界处折返信号的反馈差值;
8、基于定位校正后的运动更新模型建立区域安全通行区域,并在空间地图内存储以生成电子导航图,所述电子导航图用于响应用户导航需求建立基本导航路径。
9、作为本发明的进一步方案:所述并基于多组信号反馈计算用户终端在当前区域内的空间偏差量,根据空间偏差量对所述运动更新模型进行对应时间轴节点的定位矫正的步骤具体包括:
10、获取多组所述信号反馈的监测强度信息,并根据所述监测强度信息进行降序排列,获取监测强度信息的多个强度级别序列;
11、获取第一强度级别序列中多个信号反馈的反馈延时,并基于所述反馈延时计算获取多组空间校正值,即用户终端在当前区域的空间偏差量,所述空间校正值用于表征用户节点在多个空间方位与当前区域的边界距离;
12、基于运动更新模型获取修正信号对应时间轴节点时用户终端的惯性定位点,并基于预设的偏差累计最大值确定惯性定位区间,通过空间地图建立所述惯性定位区间内各空间点位与区域边界的边界距离,生成校正拟合映射模型;
13、通过所述校正拟合映射模型对所述空间偏差量的多组空间校正值进行匹配,以获取相匹配的空间点位,基于所述空间点位对所述运动更新模型进行定位校正,以替换对应时间轴节点的用户终端准确定位。
14、作为本发明的再进一步方案:还包括群组辅助定位的步骤,具体包括:
15、将可实现通信交互的多个用户终端进行编组,建立空间导航群组,并同步堆叠更新群组内的电子导航图;
16、当空间导航群组中的用户终端监测到新的接入对象信号时,获取多个用户终端对所述对象信号的接收反馈信息,所述接收反馈信息用于表征所述对象信号的信号强度以及强度方位;
17、基于多个用户终端在电子导航图中的位置信息对多个接收反馈信息进行定位,获取新接入对象信号的信号发出点位,所述信号发出点位用于表征初始点位,并同步至新接入的所述用户终端。
18、作为本发明的再进一步方案:还包括基于空间导航群组的空间地图拼接步骤,具体包括:
19、当所述空间导航群组中的用户终端监测到新的接入对象信号,且所述接入对象信号包含新增电子导航图的反馈信息时,获取所述接入对象信号的信号发出点位;
20、同步新增电子导航图并进行空间方位匹配,基于信号发出点位在空间导航群组中电子导航图的点位信息以及在新增电子导航图中的空间定位进行空间地图的定位匹配,以将所述新增电子导航图在所述电子导航图中增量同步。
21、作为本发明的再进一步方案:还包括步骤:
22、基于无人传感设备进行空间地形扫描,获取以无人传感设备为中心的范围空间内的地形结构,根据所述地形结构构建对应区域的空间地图,并将所述空间地图同步至用户终端;
23、基于所述地形结构进行避障分析,建立无人导航路径并输出,所述无人导航路径用于引导无人传感设备的承载设备运动;
24、若与用户终端的交互信号强度低于预设值,则执行睡眠程序,所述睡眠程序用于表征在交互信号强度恢复至额定值前,无人传感设备及承载设备均处于待机状态。
25、本发明实施例旨在提供一种基于空间定位的电子导航引导图生成系统,其特征在于,包含:
26、运动惯性记录模块,用于通过预设的运动传感器,获取用户终端在连续时间轴内各时间节点的惯性状态并存储,所述惯性状态表征用户终端在惯性参考系内某一时间节点的加速度信息,所述惯性状态为空间向量参数;
27、航位推测评估模块,用于基于所述惯性状态对时间进行积分,并将所述积分结果在空间坐标系内进行映射转换,获取用户终端在空间坐标系内的各轴向运动量;
28、基础运动定位模块,用于获取用户终端当前所在区域的空间地图,并将所述各轴向运动量在所述空间地图中同步标记,以获取用户终端的运动更新模型,所述运动更新模型用于表征用户终端在时间轴各节点的空间定位;
29、定位辅助修正模块,用于以预设频率输出修正信号并接收多组信号反馈,并基于多组信号反馈计算用户终端在当前区域内的空间偏差量,根据空间偏差量对所述运动更新模型进行对应时间轴节点的定位校正,所述空间偏差量用于表征修正信号在区域多组边界处折返信号的反馈差值;
30、电子导航建立模块,用于基于定位校正后的运动更新模型建立区域安全通行区域,并在空间地图内存储以生成电子导航图,所述电子导航图用于响应用户导航需求建立基本导航路径。
31、作为本发明的进一步方案:所述定位辅助修正模块具体包括:
32、信号监测单元,用于获取多组所述信号反馈的监测强度信息,并根据所述监测强度信息进行降序排列,获取监测强度信息的多个强度级别序列;
33、信号评估单元,用于获取第一强度级别序列中多个信号反馈的反馈延时,并基于所述反馈延时计算获取多组空间校正值,即用户终端在当前区域的空间偏差量,所述空间校正值用于表征用户节点在多个空间方位与当前区域的边界距离;
34、惯性定位单元,用于基于运动更新模型获取修正信号对应时间轴节点时用户终端的惯性定位点,并基于预设的偏差累计最大值确定惯性定位区间,通过空间地图建立所述惯性定位区间内各空间点位与区域边界的边界距离,生成校正拟合映射模型;
35、定位校正单元,用于通过所述校正拟合映射模型对所述空间偏差量的多组空间校正值进行匹配,以获取相匹配的空间点位,基于所述空间点位对所述运动更新模型进行定位校正,以替换对应时间轴节点的用户终端准确定位。
36、作为本发明的再进一步方案:还包括初始定位模块,具体包括:
37、群组叠加单元,用于将可实现通信交互的多个用户终端进行编组,建立空间导航群组,并同步堆叠更新群组内的电子导航图;
38、接入监测单元,用于当空间导航群组中的用户终端监测到新的接入对象信号时,获取多个用户终端对所述对象信号的接收反馈信息,所述接收反馈信息用于表征所述对象信号的信号强度以及强度方位;
39、初始定位单元,用于基于多个用户终端在电子导航图中的位置信息对多个接收反馈信息进行定位,获取新接入对象信号的信号发出点位,所述信号发出点位用于表征初始点位,并同步至新接入的所述用户终端。
40、作为本发明的再进一步方案:还包括地图拼接模块,具体包括:
41、匹配点获取单元,用于当所述空间导航群组中的用户终端监测到新的接入对象信号,且所述接入对象信号包含新增电子导航图的反馈信息时,获取所述接入对象信号的信号发出点位;
42、地图拼接单元,用于同步新增电子导航图并进行空间方位匹配,基于信号发出点位在空间导航群组中电子导航图的点位信息以及在新增电子导航图中的空间定位进行空间地图的定位匹配,以将所述新增电子导航图在所述电子导航图中增量同步。
43、作为本发明的再进一步方案:还包括无人采集模块,具体包括:
44、采集回传单元,用于基于无人传感设备进行空间地形扫描,获取以无人传感设备为中心的范围空间内的地形结构,根据所述地形结构构建对应区域的空间地图,并将所述空间地图同步至用户终端;
45、避障引导单元,用于基于所述地形结构进行避障分析,建立无人导航路径并输出,所述无人导航路径用于引导无人传感设备的承载设备运动;
46、启停管理单元,用于若与用户终端的交互信号强度低于预设值,则执行睡眠程序,所述睡眠程序用于表征在交互信号强度恢复至额定值前,无人传感设备及承载设备均处于待机状态。
47、与现有技术相比,本发明的有益效果是:通过进行惯性测量并积分的方式,来实现对用户终端在某一空间内的自主定位,且通过反射信号分析对自主定位的进一步修正,更提升了在区域空间内的定位精准性,相较于现有技术中的多种定位方式,能够实现完全自主的空间定位实现,以建立空间内的电子导航图,实现单设备独立的导航功能,能够使用于更加复杂的地下或无人区探索等场景中。
- 还没有人留言评论。精彩留言会获得点赞!