一种海面多GNSS天线和声呐组合定位方法与流程
本发明属于水下导航定位,尤其涉及一种海面多gnss天线和声呐组合定位方法。
背景技术:
1、海底大地基准网是陆基大地控制网在海底的自然延伸,是国家大地基准网的重要组成部分,也将是新一代国家综合pnt (positioning, navigation and timing) 系统建设的重要组成。海底大地基准网是一组布放在海底的声学基准站,组建类似gnss星座的定位系统,既可以对水面及水下的各类设备提供时间和空间信息,也可用来监测海底板块、提供水下导航定位以及水体环境的动态变化。因此,高精度的海底控制点坐标是海底大地基准网建设的关键。
2、gnss和声呐组合定位系统通常用于确定水下目标点坐标,主要流程为:由测量船上的gnss接收机、姿态传感器以及臂长参数确定声呐换能器坐标,再由声呐换能器到应答器的往返传播时间以及声速剖面确定声呐换能器与应答器间的距离,最后经距离交会确定海底控制点坐标。由此可知,获得高精度的海底控制点坐标的前提要保证gnss天线坐标的准确。
3、传统的gnss天线和声呐组合定位系统仅搭载一根gnss天线,由于多路径效应等因素的影响,可能会造成模糊度失锁的情况,导致海面平台的精度和可靠性差,进而影响海底控制点的定位精度。
4、另外,在测量船对某一测量水域测量时,传统方法采用搭载一根gnss天线,为了获得更多的观测数据,通常会按照预定的航迹多次进行重复观测,这无疑增加了出海成本以及出海时间。
技术实现思路
1、本发明的目的在于提供一种海面多gnss天线和声呐组合定位方法,有效解决传统定位系统因模糊度失锁的情况而导致海面平台的精度和可靠性差的问题以及有效削弱定位过程中受到的随机误差影响,并通过采用虚拟天线代替gnss天线阵列的方法,在保证精度的同时,提高解算效率。
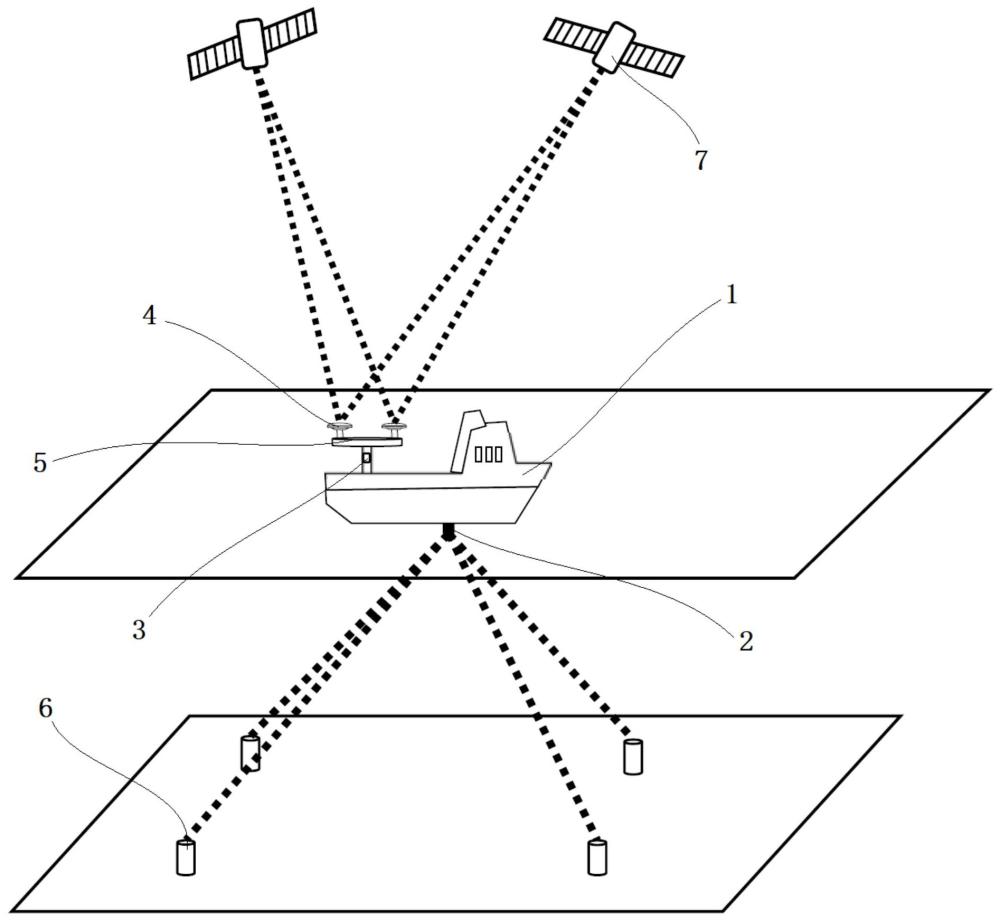
2、为解决上述技术问题,本发明采用的技术方案是:一种海面多gnss天线和声呐组合定位方法,基于海面多gnss天线和声呐组合定位系统,所述声呐组合定位系统包括布设在测量船上的gnss天线阵列、声呐换能器和姿态传感器以及布设在海底的应答器阵列,所述gnss天线阵列由多根gnss天线呈正多边形分布在用于布设gnss天线的同一面板上构成,所述应答器阵列包括至少三个应答器。
3、海面多gnss天线和声呐组合定位方法包括以下步骤:s1、测量船按照预定航迹对测量水域进行测量,通过gnss天线阵列实时接收卫星信号,提供各gnss天线的位置信息,gnss天线相应的臂长参数预先标定或同应答器坐标一并作为待估参数进行求解,将各gnss天线坐标通过坐标转换公式转换到站心坐标系下,各gnss天线的位置信息为,,式中,表示第根gnss天线,、、分别表示第根gnss天线在东、北、天三个方向上的坐标分量。
4、以虚拟天线表示gnss天线阵列,将各gnss天线的坐标取平均得到虚拟天线的位置信息,,分别表示虚拟天线在东、北、天三个方向上的坐标分量。
5、s2、由姿态传感器提供实时的姿态角信息,包括航向角、俯仰角以及横滚角。
6、s3、测定各gnss天线对应臂长参数的初始值,,将各gnss天线对应臂长参数的初始值取平均得虚拟臂长参数的初始值,,其中,分别表示第根gnss天线相位中心到声呐换能器的向量在东、北、天三个方向上的分量,分别表示虚拟天线相位中心到声呐换能器的向量在东、北、天三个方向上的分量。
7、s4、根据虚拟臂长参数的初始值以及姿态角信息确定声呐换能器的位置坐标,或者根据各gnss天线对应臂长参数的初始值以及姿态角信息确定声呐换能器的位置坐标。
8、s5、测量船按照预设航迹对海底的应答器进行定位,即通过测量声呐换能器与应答器间的声信号往返传播时间,利用声线跟踪方法或者距离交会方法实现对应答器位置的确定。
9、进一步地,在步骤s4中,根据所述姿态角信息以及虚拟臂长参数的初始值确定所述声呐换能器位置信息的步骤如下:c1、由姿态角信息得到旋转矩阵,
10、,
11、式中,分别表示矩阵的9个元素。
12、c2、由虚拟天线的位置信息以及虚拟臂长参数的初始值,确定虚拟天线对应声呐换能器的位置坐标: 。
13、进一步地,在步骤s5中,依据姿态角信息以及虚拟臂长参数的初始值确定的声呐换能器位置信息,对海底的应答器进行定位包括以下步骤:d1、所述海面多gnss天线和声呐组合定位系统利用非差分定位模型分别对应答器位置和虚拟臂长参数线性化,,式中,表示第个应答器,表示观测历元,为总观测历元数,为第个观测历元时声呐换能器与第个海底应答器间实际测量的距离,为第个观测历元时声呐换能器与第个海底应答器间计算的距离,为系统误差,为在第个观测历元观测第个海底应答器时的随机误差。
14、;
15、;
16、;
17、;式中,、分别为应答器坐标参数以及虚拟臂长参数对应的系数矩阵,为第个观测历元时声呐换能器与第个应答器间欧氏距离的初始值,表示虚拟天线相位中心到声呐换能器的向量分别在东、北、天三个方向上的分量,、、分别表示第个海底应答器在东、北、天三个方向上的坐标分量,、、分别表示第个观测历元时声呐换能器在东、北、天三个方向上的坐标分量。
18、d2、将应答器的位置坐标与虚拟臂长参数作为待估参数共同解算,列误差方程式,式中,为应答器位置坐标和虚拟臂长参数的改正数,是已知值矩阵,,,式中,为观测权重;依据改正数,进而得到虚拟臂长参数和应答器的位置坐标。
19、进一步地,在步骤s4中,根据姿态角信息以及各gnss天线对应臂长参数的初始值确定声呐换能器位置信息的步骤如下: c1、由姿态角信息得到旋转矩阵,
20、,
21、式中,分别表示矩阵的9个元素。
22、c2、由各gnss天线的位置信息以及相应臂长参数的初始值,确定各gnss天线对应声呐换能器的位置坐标: 。
23、进一步地,在步骤s5中,依据姿态角信息以及各gnss天线对应臂长参数的初始值确定的声呐换能器位置信息,对海底的应答器进行定位包括以下步骤: d1、海面多gnss天线和声呐组合定位系统利用非差分定位模型分别对应答器的位置坐标和臂长参数线性化,,式中,为第根gnss天线在第个观测历元时声呐换能器与第个应答器间的实际距离,为第根gnss天线在第个观测历元时声呐换能器与第个应答器间计算的距离,为第根gnss天线对应声呐换能器的位置坐标,为第根gnss天线对第个应答器的定位结果,为第根gnss天线的系统误差,为第根gnss天线在第个观测历元时观测第个应答器的随机误差。
24、;
25、;
26、;
27、;式中,、分别为第根gnss天线对应的应答器坐标参数以及臂长参数的系数矩阵,为第根gnss天线在第个观测历元时声呐换能器与第个应答器间的初始距离,表示第根gnss天线相位中心到声呐换能器的向量分别在东、北、天三个方向上的分量,、、分别表示第根gnss天线对第个应答器在东、北、天三个方向上的坐标分量,、、分别表示第根gnss天线在第个观测历元时声呐换能器在东、北、天三个方向上的坐标分量。
28、d2、将应答器的位置坐标与臂长参数作为待估参数共同解算,列误差方程式:,式中,为第根gnss天线解算的应答器坐标与臂长参数的改正数。是已知值矩阵,,,式中,为第根gnss天线的观测值权重,经解算得到第根gnss天线的应答器位置坐标及臂长参数的改正数,进而得到第根gnss天线的臂长参数及应答器的位置坐标。
29、d3、将各gnss天线对同一应答器解算的位置坐标值取平均,得到所述应答器的最终坐标:。
30、进一步地,所述声呐换能器位于测量船的底部且在海面以下。
31、本发明的有益技术效果是:本发明通过船载多根gnss天线,提高海面平台定位精度和可靠性,有效削弱定位过程中随机误差的影响,进而提高海底控制点的定位精度,便于海底大地控制网高精度观测和维护。其中,定位方法有两种方式,一是通过引入多个臂长参数,构建多gnss和声呐组合观测方程进行解算;二是通过引入虚拟天线(即gnss天线阵列中心)及虚拟臂长参数,构建gnss和声呐组合观测方程的形式进行解算。二者的定位精度相当,但采用虚拟天线方式可成倍提高解算效率。
- 还没有人留言评论。精彩留言会获得点赞!