一种雷达信号的处理方法、处理装置、终端及存储介质与流程
本发明属于信号处理的,尤其涉及一种雷达信号的处理方法、处理装置、终端及存储介质。
背景技术:
1、雷达识别技术指的是利用雷达系统对目标进行识别和分类的技术。雷达(radar)是一种无线电测量与探测技术,它通过发送无线电波并接收其反射回来的信号来检测周围环境中的物体。雷达识别技术可以对检测到的目标进行辨识和分类。目标辨识常使用特征提取和模式识别方法,包括形状特征、散射特性、极化特性等,来识别目标的类型。目标分类则是将目标分为不同的类别,例如人、车、飞机等,并根据目标的特征进行分类。
2、其中,在雷达识别技术中cfar算法是常用的目标检测算法。cfar算法指的是恒虚警率自适应滤波(constant false alarm rate adaptive filter)算法。它是一种在雷达信号处理中常用的技术,用于检测和识别目标。然而,传统的cfar算法无法很好地适应不同的场景(例如:不同路况或天气等场景),导致计算精度较低,这是一个亟需解决的技术问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种雷达信号的处理方法、处理装置、终端及存储介质,以解决传统的cfar算法无法很好地适应不同的场景(例如:不同路况或天气等场景),导致计算精度较低的技术问题。
2、本发明实施例的第一方面提供了一种雷达信号的处理方法,所述雷达信号的处理方法,包括:
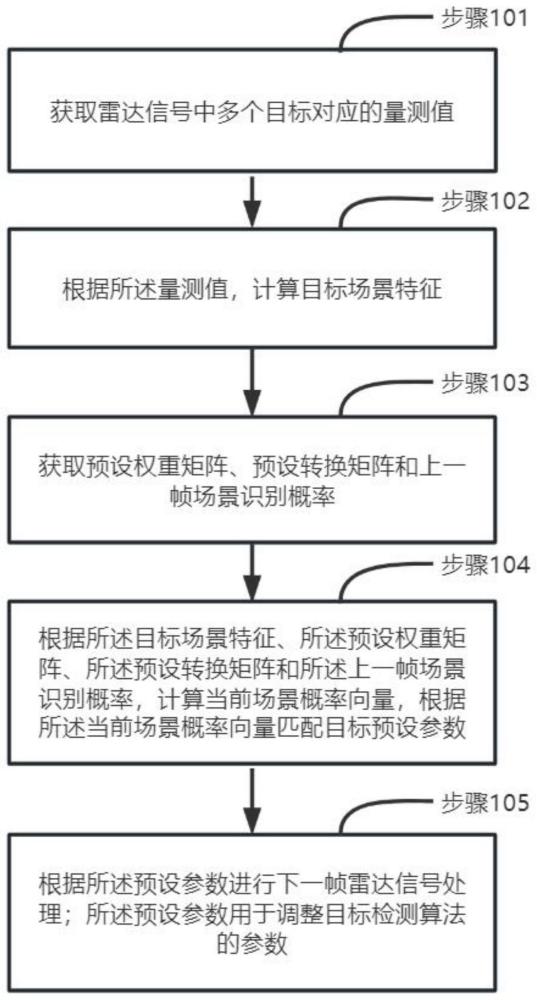
3、获取雷达信号中多个目标对应的量测值,所述量测值包括距离、速度、方位角、俯仰角、强度和雷达散射截面积;
4、根据所述量测值,计算目标场景特征;
5、获取预设权重矩阵、预设转换矩阵和上一帧场景识别概率;
6、根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数;所述上一帧场景识别概率是指在上一帧的场景识别中识别结果为实际场景的概率;
7、进一步地,所述根据所述量测值,计算目标场景特征的步骤包括:
8、计算第一数量的绝对静止目标对应的俯仰角均值;
9、计算固定区域内第二数量的绝对静止目标对应的雷达散射截面积均值;
10、计算护栏目标数量和静止目标数据之间的比值;
11、将所述俯仰角均值、所述雷达散射截面积均值和所述比值归一化处理,得到所述目标场景特征。
12、进一步地,所述固定区域包括左侧和右侧相邻的三个车道
13、进一步地,所述根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数的步骤包括:
14、将所述目标场景特征和所述预设权重矩阵相乘,得到场景置信度;
15、根据所述场景置信度、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量;
16、根据所述当前场景概率向量匹配目标预设参数。
17、进一步地,所述根据所述场景置信度、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量的步骤包括:
18、将所述场景置信度、所述预设转换矩阵和所述上一帧场景识别概率代入如下公式,得到所述当前场景概率向量;
19、所述公式为:
20、其中,表示所述当前场景概率向量,表示所述上一帧场景概率,α表示预设的时间平滑因子,pn×n表示所述预设转换矩阵,表示所述场景置信度。
21、进一步地,所述根据所述当前场景概率向量匹配目标预设参数的步骤包括:
22、获取所述当前场景概率向量中最大概率值对应的场景类型;
23、将所述场景类型对应的预设参数,作为所述目标预设参数。
24、进一步地,所述目标检测算法包括恒虚警检测
25、本发明实施例的第二方面提供了一种雷达信号的处理装置,所述雷达信号的处理装置包括:
26、第一获取单元,用于获取雷达信号中多个目标对应的量测值,所述量测值包括距离、速度、方位角、俯仰角、强度和雷达散射截面积;
27、第一计算单元,用于根据所述量测值,计算目标场景特征;
28、第二获取单元,用于获取预设权重矩阵、预设转换矩阵和上一帧场景识别概率;
29、第二计算单元,用于根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数;所述上一帧场景识别概率是指在上一帧的场景识别中识别结果为实际场景的概率;
30、处理单元,用于根据所述预设参数进行下一帧雷达信号处理;所述预设参数用于调整目标检测算法的参数。
31、本发明实施例的第三方面提供了一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述方法的步骤。
32、本发明实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述方法的步骤。
33、本发明实施例与现有技术相比存在的有益效果是:本发明通过获取雷达信号中多个目标对应的量测值,所述量测值包括距离、速度、方位角、俯仰角、强度和雷达散射截面积;根据所述量测值,计算目标场景特征;获取预设权重矩阵、预设转换矩阵和上一帧场景识别概率;根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数;所述上一帧场景识别概率是指在上一帧的场景识别中识别结果为实际场景的概率;根据所述预设参数进行下一帧雷达信号处理;所述预设参数用于调整目标检测算法的参数。在上述方案中,通过计算雷达信号中的目标场景特征,并根据目标场景特征、预设权重矩阵、预设转换矩阵和上一帧场景识别概率,计算当前场景概率向量,进而匹配当前场景下的预设参数。其中,预设参数适用于当前场景下的雷达信号处理,实现对场景的自适应识别,更好地适应复杂的天气和路况场景,提高了数据处理的准确度和可靠性。
技术特征:
1.一种雷达信号的处理方法,其特征在于,所述雷达信号的处理方法,包括:
2.如权利要求1所述的雷达信号的处理方法,其特征在于,所述根据所述量测值,计算目标场景特征的步骤包括:
3.如权利要求2所述的雷达信号的处理方法,其特征在于,所述固定区域包括左侧和右侧相邻的三个车道。
4.如权利要求1所述的雷达信号的处理方法,其特征在于,所述根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数的步骤包括:
5.如权利要求4所述的雷达信号的处理方法,其特征在于,所述根据所述场景置信度、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量的步骤包括:
6.如权利要求4所述的雷达信号的处理方法,其特征在于,所述根据所述当前场景概率向量匹配目标预设参数的步骤包括:
7.如权利要求1至6任意一项所述的雷达信号的处理方法,其特征在于,所述目标检测算法包括恒虚警检测。
8.一种雷达信号的处理装置,其特征在于,所述雷达信号的处理装置,包括:
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本发明适用于信号处理的技术领域,提供了一种雷达信号的处理方法、处理装置、终端及存储介质,所述雷达信号的处理方法包括:获取雷达信号中多个目标对应的量测值;根据所述量测值,计算目标场景特征;获取预设权重矩阵、预设转换矩阵和上一帧场景识别概率;根据所述目标场景特征、所述预设权重矩阵、所述预设转换矩阵和所述上一帧场景识别概率,计算当前场景概率向量,根据所述当前场景概率向量匹配目标预设参数;根据所述预设参数进行下一帧雷达信号处理;所述预设参数用于调整目标检测算法的参数。在上述方案中,实现了对场景的自适应识别,更好地适应复杂的天气和路况场景,提高了数据处理的准确度和可靠性。
技术研发人员:陈承文,周珂,邓峰
受保护的技术使用者:深圳承泰科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!