一种猪舍内自主导航方法及系统
本发明涉及畜禽养殖装备领域,特别是涉及一种猪舍内自主导航方法及系统。
背景技术:
1、随着生猪养殖业规模化集约化程度越来越高,生产环节中对各类自动作业设备提出了更高要求,机器代人成为规模猪场发展的必然趋势。其中,移动作业机器人需搭载自动导航底盘完成精准作业,而猪舍内复杂的设施结构环境对导航精度提出了更高要求。
2、针对规模生猪养殖场猪舍内复杂设施环境下,现有的单一激光或单一视觉主流导航技术精度不够,会影响移动智能装备作业效果。因此,提高猪舍导航精度,对于节省畜牧业人工劳力、提高智能化程度和劳动生产率、减少病原传播等具有重要意义。
技术实现思路
1、本发明的目的是提供一种猪舍内自主导航方法及系统,可提高猪舍导航精度。
2、为实现上述目的,本发明提供了如下方案:
3、一种猪舍内自主导航方法,包括:
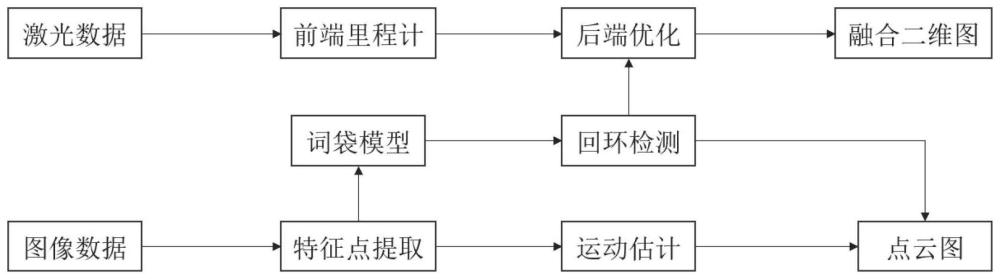
4、获取在猪舍内部通道上移动过程中每个时刻采集猪舍的舍内图像和激光数据;
5、根据每个时刻的激光数据,采用前端里程计算法构建每个时刻猪舍的全局位姿图;
6、从每个时刻的舍内图像中提取特征点;
7、采用特征点结合词袋模型,对所述全局位姿图进行回环检测和修正,获得每个时刻猪舍的融合二维栅格图;
8、根据相邻帧舍内图像中的特征点进行运动估计,获得特征点的相对运动;
9、根据特征点的相对运动和每个时刻的舍内图像,构建每个时刻猪舍的点云图;
10、对每个时刻猪舍的点云图进行回环检测和修正,获得每个时刻猪舍最终的点云图;
11、根据每个时刻猪舍的融合二维栅格图和每个时刻猪舍最终的点云图进行猪舍内的导航。
12、一种猪舍内自主导航系统,包括:外部感知模块、上位机模块、下位机模块和移动模块;
13、外部感知模块、上位机模块和下位机模块均设置在移动模块上;
14、上位机模块的第一信号输入端与外部感知模块的信号输出端连接,上位机模块的信号输出端与下位机模块的信号输入端连接,下位机模块的驱动端与移动模块连接;
15、所述移动模块用于带动外部感知模块在猪舍内部通道上移动;
16、所述外部感知模块用于在猪舍内部通道上移动过程中采集猪舍的舍内图像和激光数据;
17、所述上位机模块用于根据所述舍内图像和所述激光数据,采用实施例一的猪舍内自主导航方法进行实时导航,产生实时导航信息;
18、所述下位机模块用于接收所述实时导航信息,并按照所述实时导航信息驱动移动模块进行移动。
19、根据本发明提供的具体实施例,本发明公开了以下技术效果:
20、本发明实施例的一种猪舍内自主导航方法及系统,结合舍内图像和激光数据,并进行回环检测和修正,获得每个时刻猪舍的融合二维栅格图;还根据舍内图像构建了猪舍的点云图,最终依据每个时刻猪舍的融合二维栅格图和每个时刻猪舍最终的点云图进行猪舍内的实时导航。本发明通过融合建图,提高了猪舍导航精度。
技术特征:
1.一种猪舍内自主导航方法,其特征在于,包括:
2.根据权利要求1所述的猪舍内自主导航方法,其特征在于,所述激光数据包括:限位栏的深度信息、障碍物的深度信息和墙面的深度信息;
3.根据权利要求1所述的猪舍内自主导航方法,其特征在于,从每个时刻的舍内图像中提取特征点,具体包括:
4.根据权利要求1所述的猪舍内自主导航方法,其特征在于,所述词袋模型的构建方法为k-means法。
5.根据权利要求1所述的猪舍内自主导航方法,其特征在于,所述运动估计所采用的方法为pnp位姿转换法。
6.一种猪舍内自主导航系统,其特征在于,包括:外部感知模块、上位机模块、下位机模块和移动模块;
7.根据权利要求6所述的猪舍内自主导航系统,其特征在于,所述外部感知模块包括:激光雷达和深度相机;
8.根据权利要求6所述的猪舍内自主导航系统,其特征在于,所述下位机模块包括:单片机模块、电机驱动模块和直流电机;
9.根据权利要求8所述的猪舍内自主导航系统,其特征在于,所述下位机模块还包括:编码器;
技术总结
本发明公开一种猪舍内自主导航方法及系统,属于畜禽养殖装备领域。该方法结合舍内图像和激光数据,并进行回环检测和修正,获得每个时刻猪舍的融合二维栅格图;还根据舍内图像构建了猪舍的点云图,最终依据每个时刻猪舍的融合二维栅格图和每个时刻猪舍最终的点云图进行猪舍内的实时导航。本发明通过融合建图,提高了猪舍导航精度,对于节省畜牧业人工劳力、提高智能化程度和劳动生产率、减少病原传播等具有重要意义。
技术研发人员:周昕,潘梓博,周卫东,叶春林,孙洪超,刘凯歌,包权,李守润,王坤,冯钧哲,刘华东,蔡静
受保护的技术使用者:浙江省农业科学院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!