一种航站楼巡检路径规划方法、装置、设备及存储介质与流程
本发明涉及地理信息系统软件,特别涉及一种航站楼巡检路径规划方法、装置、设备及存储介质。
背景技术:
1、航站楼存在较多巡检点位分布时,管理人员需要先将巡检点位划分为多个不同区域,然后对每个区域的巡检点位进行串联工作。巡检人员按照管理人员串联的路线进行巡检或者自行规划巡检路线。
2、但采用现有技术中的巡检方法,管理人员或巡检人员无法有效规划最短的巡检路径,导致巡检效率较低。
技术实现思路
1、本发明的主要目的是提供一种航站楼巡检路径规划方法、装置、设备及存储介质,旨在解决采用现有的巡检方法,管理人员或巡检人员无法有效规划最短的巡检路径,导致巡检效率较低的技术问题。
2、为实现上述目的,本发明提出一种航站楼巡检路径规划方法,用于计算机设备;所述方法包括以下步骤:
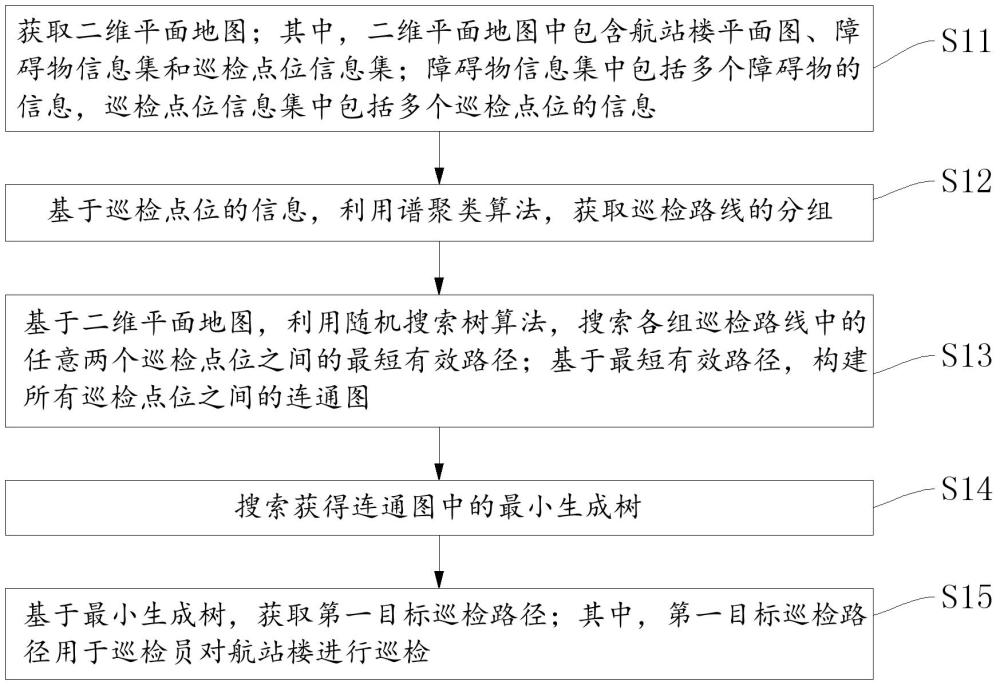
3、获取二维平面地图;其中,所述二维平面地图中包含航站楼平面图、障碍物信息集和巡检点位信息集;所述障碍物信息集中包括多个障碍物的信息,所述巡检点位信息集中包括多个巡检点位的信息;
4、基于所述巡检点位的信息,利用谱聚类算法,获取巡检路线的分组;
5、基于所述二维平面地图,利用随机搜索树算法,搜索各组所述巡检路线中的任意两个巡检点位之间的最短有效路径;基于所述最短有效路径,构建所有所述巡检点位之间的连通图;
6、搜索获得所述连通图中的最小生成树;
7、基于所述最小生成树,获取第一目标巡检路径;其中,所述第一目标巡检路径用于巡检员对航站楼进行巡检。
8、可选的,在所述基于所述最小生成树,获取第一目标巡检路径的步骤之后,还包括:利用平滑算法对所述第一目标巡检路径进行平滑处理,获得第二目标巡检路径;其中,所述第二目标巡检路径用于无人机或机器人对航站楼进行巡检。
9、可选的,所述利用随机搜索树算法,搜索各组所述巡检路线中的任意两个巡检点位之间的最短有效路径的步骤,包括:
10、s301:基于所述二维平面地图,获取起点信息和目标点信息,以起点为初始点建立搜索树;
11、s302:在所述二维平面地图中随机生成一个虚拟节点,记为第一节点;
12、s303:在当前的所述搜索树中找到一个离所述第一节点最近的节点作为第二节点;
13、s304:将所述第一节点和所述第二节点相连,获得第一连线;在所述第一连线的延伸方向上,以所述第二节点为起点,根据预设的步长生成新的节点,记为第三节点,并将所述第三节点加入所述搜索树中,获得过渡生成树;
14、s305:将所述第二节点与所述第三节点相连,获得第二连线;若所述第二连线穿过所述障碍物信息集中任一障碍物,则舍弃第三节点,并返回步骤s302进行下一次迭代;若所述第二连线不穿过所述障碍物信息集中任一障碍物,则在当前的所述过渡生成树中寻找离所述第三节点最近的节点,并记为第四节点,舍弃所述第二节点并将所述第四节点加入所述过渡生成树中,获得目标生成树;
15、s306:基于预设距离值,判断所述第三节点是否到达终点,若没有到达终点,则重复上述步骤;若到达终点,则基于目标生成树,输出起点与目标点之间的最短有效路径。
16、可选的,所述基于预设距离值,判断所述第三节点是否到达终点,包括:获取所述第三节点与目标点之间的距离值;基于所述距离值和预设距离值,判断所述第三节点是否到达终点;其中,所述预设距离值≥0。
17、可选的,所述基于所述距离值和预设距离值,判断所述第三节点是否到达终点,包括:若所述距离值≤所述预设距离范围值,则所述第三节点到达终点;若所述距离值>所述预设距离范围值,则所述第三节点未到达终点。
18、可选的,所述搜索获得所述连通图中的最小生成树,包括:
19、基于所述目标生成树,获取所述目标生成树上的各节点之间的路径集合;计算节点间路径的欧氏距离之和,并存储为三元组数据;
20、基于所述三元组数据,构建所述巡检点位信息集中每任意两个巡检点位之间的距离字典;其中,所述距离字典中包括多条有效路径;
21、基于所述距离字典和所述巡检点位信息集,利用prim算法构建所述最小生成树。
22、可选的,所述利用prim算法构建所述最小生成树,包括:基于所述prim算法,利用优先级队列构建所述最小生成树。
23、此外,为实现上述目的,本发明还提出了一种航站楼巡检路径规划装置,包括:
24、第一获取模块,用于获取二维平面地图;其中,所述二维平面地图中包含航站楼平面图、障碍物信息集和巡检点位信息集;所述障碍物信息集中包括多个障碍物的信息,所述巡检点位信息集中包括多个巡检点位的信息;
25、第二获取模块,用于基于所述巡检点位信息,利用谱聚类算法,获取巡检路线的分组;
26、第一搜索模块,用于基于所述二维平面地图,利用随机搜索树算法,搜索各组所述巡检路线中的任意两个巡检点位之间的最短有效路径;基于所述最短有效路径,构建所有所述巡检点位之间的连通图;
27、第二搜索模块,用于搜索所述连通图中的最小生成树;
28、第三获取模块,用于基于所述最小生成树,获取第一目标巡检路径;其中,所述第一目标巡检路径用于巡检员对航站楼进行巡检。
29、此外,为实现上述目的,本发明还提出了一种计算机设备,该计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现如上述任一项所述航站楼巡检路径规划方法的步骤。
30、此外,为实现上述目的,本发明还提出了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现如上述任一项所述航站楼巡检路径规划方法的步骤。
31、此外,为实现上述目的,本发明还提出了一种计算机程序产品,所述计算机程序产品在被处理器运行时,实现如上述一项所述航站楼巡检路径规划方法的步骤。
32、现有方法中,管理人员或巡检人员无法有效规划最短的巡检路径,导致巡检效率较低。而利用本发明的方法,谱聚类算法可以根据巡检点的位置划分巡检路线的分组;利用随机搜索树算法可以找到任意两个巡检点位之间的最短有效路径,基于有效路径的连通图可以搜索到最小生成树;基于最小生成树可以获取用于巡检员对航站楼进行巡检的第一目标巡检路径。第一目标巡检路径的规划排除了人为主观因素进行路径规划带来的不确定性与非最优性,提高了巡检过程的规范性和高效性。
技术特征:
1.一种航站楼巡检路径规划方法,其特征在于,用于计算机设备;所述方法包括以下步骤:
2.如权利要求1所述的航站楼巡检路径规划方法,其特征在于,在所述基于所述最小生成树,获取第一目标巡检路径的步骤之后,还包括:
3.如权利要求1所述的航站楼巡检路径规划方法,其特征在于,所述利用随机搜索树算法,搜索各组所述巡检路线中的任意两个巡检点位之间的最短有效路径的步骤,包括:
4.如权利要求3所述的航站楼巡检路径规划方法,其特征在于,所述基于预设距离值,判断所述第三节点是否到达终点,包括:
5.如权利要求4所述的航站楼巡检路径规划方法,其特征在于,所述基于所述距离值和预设距离值,判断所述第三节点是否到达终点,包括:
6.如权利要求3所述的航站楼巡检路径规划方法,其特征在于,所述搜索获得所述连通图中的最小生成树,包括:
7.如权利要求6所述的航站楼巡检路径规划方法,其特征在于,所述利用prim算法构建所述最小生成树,包括:
8.一种航站楼巡检路径规划装置,其特征在于,包括:
9.一种计算机设备,其特征在于,该计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现如权利要求1-7中任一项所述的方法。
技术总结
本发明公开一种航站楼巡检路径规划方法、装置、设备及存储介质,涉及地理信息系统软件技术领域,其中,航站楼巡检路径规划方法用于计算机设备;方法包括以下步骤:获取二维平面地图;基于二维平面地图,利用随机搜索树算法,搜索各组巡检路线中的任意两个巡检点位之间的最短有效路径;基于最短有效路径,构建所有巡检点位之间的连通图;搜索获得连通图中的最小生成树;基于最小生成树,获取第一目标巡检路径;其中,第一目标巡检路径用于巡检员对航站楼进行巡检。利用本发明的方法,排除了人为主观因素进行路径规划带来的不确定性与非最优性,提高了巡检过程的规范性和高效性。
技术研发人员:李静毅,程思远,王鹏,张晏,徐旭,蒲佳朋,孙茂森,苏柯,曹阳,杨忠鹏,黄朝科,周远兵,邹丽姣,冯敏敏,虞润泽,陈刚,陈春欣,蒲晓杉,吴涛,王骏
受保护的技术使用者:民航成都电子技术有限责任公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!