一种基于IMU的GNSS测波缺测补偿方法与流程
本发明属于海洋环境监测领域,特别涉及一种基于imu的gnss测波缺测补偿方法。
背景技术:
1、波浪作为海洋中的关键动态现象,在监测其变化并研究规律方面扮演着重要角色。对海上活动和减灾防灾工作而言,深入了解这一现象具有重要意义。近几十年来,随着人类对海洋的不断开发和卫星导航技术的飞速发展,不仅推动了海洋观测方法的研究,还促进了先进仪器设备的研制。
2、gnss测波浮标利用了全球导航卫星系统(gnss)获取浮标载体的三维空间位置、速度和时间信息,可以有效反演波浪要素。但是gnss测波浮标在某些场景下偶有gnss缺测现象发生(例如海水覆盖天线),影响了gnss获取浮标载体的三维速度的完整性。
3、惯性测量单元(imu)是一种集成了多个惯性传感器的设备,用于测量和记录物体的加速度和角速度,并且imu是自主的,不依赖于外部信号源,这使得它在一些gnss拒止环境中更为可靠,并且在短时间内可以提供高精度的位置和速度信息,可以有效地辅助gnss补全缺测期间的三维空间位置和速度信息。mems(微机电系统)imu的功耗和成本都较低,适合将mems imu与gnss结合进行波浪测量。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于imu的gnss测波缺测补偿方法,当出现gnss缺测时,imu可以将浮标的速度、位置等信息补偿到gnss速度、位置序列中,适用于海洋、河流、湖泊等场景,在gnss拒止条件下仍可正常工作,能够获得短期高精度的浮标速度补偿结果。
2、为达到上述目的,本发明的技术方案如下:
3、一种基于imu的gnss测波缺测补偿方法,包括如下步骤:
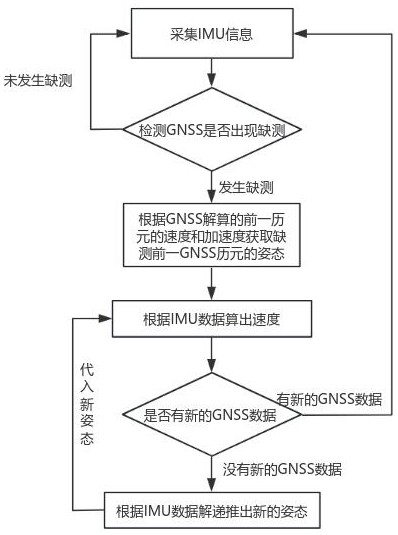
4、步骤1,采用搭载gnss的载体构成海面波浪测量装置,将imu安装在载体装置舱内,实时采集当前载体相较于惯性系下的加速度和角加速度;
5、步骤2,将采集的imu数据解码转换成三轴速度增量和三轴角速度增量,并保存;
6、步骤3,检测gnss的速度时间序列是否连贯,当检测到gnss的观测数据出现缺测现象时,使用缺测前一gnss历元由gnss测得的速度和加速度,求解出缺测前一gnss历元的载体姿态;
7、步骤4,利用求得的载体姿态和imu采集的三轴速度增量和三轴角速度增量,从缺测前一gnss历元开始,对载体速度进行递推,得到在gnss缺测期间的速度序列,并将得到的速度序列补充到gnss所测量的速度序列中,完成对gnss缺测速度序列的补充;如果在下一个imu采样时刻能检测到gnss数据,则返回步骤1;如果在经过一个imu采样间隔后仍然检测不到gnss数据,则继续执行步骤5;
8、步骤5,使用imu采集的三轴速度增量和三轴角速度增量,从缺测前一gnss历元开始,对载体姿态进行递推,得到最新的载体姿态信息,然后返回步骤4。
9、上述方案中,步骤3中,缺测前一gnss历元从b系到n系的姿态矩阵表示为,b系为载体坐标系,n系为站心地平坐标系;
10、求解载体姿态的方程如式(1),(2),(3)所示:
11、 (1);
12、(2);
13、(3);
14、其中,为航向角,为纵摇角,为横摇角,、、分别是北向、东向、垂向的速度分量,为提升加速度,具体表达式为,其中,是加速度沿速度法向量的分量,是重力加速度沿速度法向的分量;的构成如式(4)所示:
15、 (4);
16、通过gnss得到航向角、横摇角和纵摇角后,构建缺测前一gnss历元的姿态矩阵,缺测前一gnss历元的姿态矩阵表示如式(5)所示:
17、(5)。
18、上述方案中,步骤4中,gnss缺测期间的速度序列递推求解方程如式(6)所示:
19、(6);
20、其中,为前一imu时刻的速度在n系下的投影,是当前imu时刻由imu获取的三维加速度经过公式(7)补偿后再通过当前imu时刻的姿态矩阵投影到n系得到的速度增量,代表哥氏加速度造成的速度增量在n系下的投影,的计算公式如式(8)所示:
21、<mi>δ</mi><msubsup><mi>v</mi><mi>f,k</mi><mi>n(k)</mi></msubsup><mi>=</mi><msubsup><mi>c</mi><mi>b(k)</mi><mi>n(k)</mi></msubsup><mi>*[δ</mi><msub><mi>v</mi><mi>k</mi></msub><mo>+</mo><mfrac><mn>1</mn><mn>2</mn></mfrac><mi>*</mi><mi>δ</mi><msub><mi>θ</mi><mi>k</mi></msub><mi>×δ</mi><msub><mi>v</mi><mi>k</mi></msub><mo>+</mo><mfrac><mn>1</mn><mn>12</mn></mfrac><mi>*</mi><mi>(δ</mi><msub><mi>θ</mi><mrow><mi>k</mi><mi>-</mi><mn>1</mn></mrow></msub><mi>×δ</mi><msub><mi>v</mi><mi>k</mi></msub><mi>+δ</mi><msub><mi>v</mi><mrow><mi>k</mi><mi>-</mi><mn>1</mn></mrow></msub><mi>×δ</mi><msub><mi>θ</mi><mi>k</mi></msub><mi>)]</mi> (7);
22、<mi>δ</mi><msubsup><mi>v</mi><mi>f/cor,k</mi><mi>n(k)</mi></msubsup><mi>=[</mi><msubsup><mi>g</mi><mi>l,k</mi><mi>n</mi></msubsup><mi>-</mi><mi>(2</mi><mi>*</mi><msubsup><mi>ω</mi><mi>en</mi><mi>n(k)</mi></msubsup><mo>+</mo><msubsup><mi>ω</mi><mi>ie</mi><mi>n(k)</mi></msubsup><mi>)×</mi><msup><mi>v</mi><mrow><mi>n(k</mi><mi>-</mi><mi>1)</mi></mrow></msup><mi>]</mi><mi>*</mi><mi>δt</mi> (8);
23、其中,代表根据当前imu时刻imu所采集的三维加速度算得的速度增量,代表根据当前imu时刻imu所采集的三维角加速度算得的角速度增量,代表当前imu时刻由于载体运动造成的牵连角速度在n系下的投影;代表当前imu时刻地球自转角速度在n系下的投影;代表当地重力在n系下的投影;代表imu的采样间隔。
24、上述方案中,步骤5中,载体姿态矩阵的递推计算方程如式(9)所示:
25、 (9);
26、其中,代表前一imu时刻的姿态矩阵,代表前一imu时刻的n系到当前imu时刻的n系的姿态转换矩阵,其求解方程如式(10)所示:
27、 (10);
28、其中,代表3阶单位矩阵;代表角速度的等效旋转矢量,代表向量的反对称矩阵,的计算公式如下所示:
29、<msub><mi>ζ</mi><mi>k</mi></msub><mi>=[</mi><msubsup><mi>ω</mi><mi>en</mi><mi>n(k)</mi></msubsup><mo>+</mo><msubsup><mi>ω</mi><mi>ie</mi><mi>n(k)</mi></msubsup><mi>]</mi><mi>*</mi><mi>δt</mi> (11);
30、代表当前imu时刻的牵连角速度在n系下的投影,代表当前imu时刻地球自转角速度在n系下的投影,代表imu的采样间隔;
31、代表当前imu时刻的b系到前一imu时刻的b系的姿态转换矩阵,其求解方程如式(12)所示:
32、 (12);
33、其中,,是当前imu时刻由imu获取的三维角加速度经过补偿改正后得到的等效矢量,代表根据当前imu时刻imu所采集的三维角加速度算得的角速度增量,代表根据前一imu时刻imu所采集的三维角加速度算得的角速度增量,代表向量的反对称矩阵。
34、上述方案中,所述载体包括漂流浮标、锚系浮标、船只、波浪滑翔器或无人船。
35、通过上述技术方案,本发明提供的一种基于imu的gnss测波缺测补偿方法具有如下有益效果:
36、本发明只需要在gnss波浪测量载体上额外搭载一个低成本、低功耗的mems imu,可以解决gnss波浪测量偶尔出现的gnss缺测现象,增加了gnss波浪测量的信息连贯性与系统稳定性;
37、本发明使用的imu是低成本的mems imu,具有低成本和低功耗的优势;本发明无需额外的储存卡储存imu信息,相较于组合导航算法降低了功耗与存储空间;
38、本发明的方法适合应用在gnss会发生缺测场景下的gnss波浪测量载体上,特别适合在gnss天线被海水覆盖或gnss信号拒止严重的场景。
- 还没有人留言评论。精彩留言会获得点赞!