一种多探头多波束的实时声线弯曲改正方法
本发明公开一种多探头多波束的实时声线弯曲改正方法,属于声线修正。
背景技术:
1、多波束测深系统具有测量范围大、测量速度快、精度和效率高的优点,适合进行大面积的海底地形探测。多波束测深系统利用声学信号在海底地形的反射信号测量实现测深,然后海水声速存在时间和空间维度的变化,造成声波在海水中的传播路径不再是直线,而是弯曲的曲线,此即多波束测深的声线弯曲改正问题。在声速剖面已知的情况下,可以采用声线跟踪的方法实现声线弯曲改正,但在实时测量过程中往往无法实时获取声速剖面,这就造成多波束测深的实时声线弯曲改正问题始终得不到解决。
技术实现思路
1、本发明的目的在于提供一种多探头多波束的实时声线弯曲改正方法,以解决现有技术中,多波束测深的实时声线弯曲改正困难的问题。
2、一种多探头多波束的实时声线弯曲改正方法,包括:
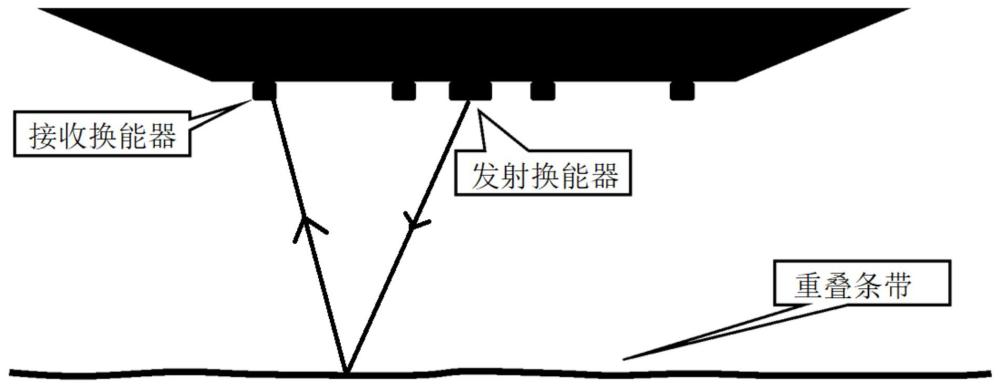
3、s1.在测量平台底部中央安装多波束信号发射换能器,沿垂直于航行方向安装多个多波束信号接收换能器,对多波束信号发射换能器、多波束信号接收换能器相对于载体坐标系的位置关系进行校准;
4、s2.多波束信号发射换能器发射声学信号,声学信号在到达海底后产生返回信号,多个多波束信号接收换能器接收返回信号,记录往返信号的传播时间和返回信号的入射角度,采用常声速值进行初步的声线弯曲改正和波束归位计算;
5、s3.利用多个波束条带间的重叠条带水深相同的约束条件,构建约束条件与等效声速梯度、往返信号的传播时间以及返回信号的入射角度间的声线跟踪模型,将等效声速梯度作为未知参数进行非线性迭代解算;
6、s4.将解算得到的等效声速梯度重新用于声线弯曲改正和波束归位计算,获得观测历元下最终的多波束测深点。
7、s1包括:
8、s1.1.多波束信号发射换能器为,多波束信号接收换能器为,为多波束信号接收换能器序号,;
9、s1.2.对多波束信号发射换能器、多波束信号接收换能器相对于载体导航定位系统的位置关系进行校准,得到安装校准平移量和旋转矩阵。
10、s2包括:
11、s2.1.往返信号的传播时间为,返回信号的入射角度为,为波束序号,,导航定位系统同时记录载体大地坐标、姿态角度、地心地固坐标;
12、载体大地坐标包括经度、纬度、高度,姿态角度包括俯仰角、侧滚角、航偏角,地心地固坐标为,其中表示地心地固坐标的三维分量;
13、s2.2.采用常声速值进行初步的声线弯曲改正,波束的侧向距和垂向距为:
14、;
15、;
16、多波束换能器坐标系下波束归位计算得到的坐标为,的坐标分量分别为:
17、;
18、;
19、。
20、s3包括,s3.1.利用多个波束条带间的重叠条带水深相同的约束条件,对第个和第个接收换能器的重叠条带的点云进行阶多项式拟合:
21、;
22、式中,是多项式拟合结果,为第个和第个接收换能器的重叠条带的点云,表示阶次,、、、……、为多项式拟合系数;
23、重叠条带的第个波束的拟合残差为:
24、;
25、式中,表示第个和第个接收换能器的重叠条带的点云在第个波束下的真值,表示第个和第个接收换能器的重叠条带的点云在第个波束下的多项式拟合值;
26、重叠条带的拟合方差为:
27、。
28、s3包括,s3.2.1.存在一个等效声速梯度使得重叠条带水深拟合结果的方差最小,构建等效声速声线跟踪方程:
29、;
30、式中,表示snell常数,,为波束入射角度,为表层声速,为波束出射角:
31、;
32、式中,是自然常数。
33、s3包括,s3.2.2.在重叠条带的拟合方差最小的情况下有:
34、;
35、式中,表示重叠条带的拟合方差。
36、s3包括,s3.2.3.进行迭代解算得到拟合方差最小情况下的等效声速梯度估计值:
37、;
38、式中,为中间参数:
39、;
40、式中,、是三个中间参数:
41、;
42、;。
43、s3包括,s3.2.4.将代入:
44、;
45、重复s3.1和s3.2,直至相邻两次解算得到的拟合方差小于阈值,阈值根据测深精度确定。
46、s4包括,s4.1.利用改正后等效声速梯度估计值,对第 i个换能器的第 j个波束进行准确的声线弯曲改正,波束的侧向距和垂向距为:
47、;
48、;
49、式中,为中间常数,,为波束入射角度,为表层声速,波束出射角为:
50、。
51、s4包括,s4.2.计算得到点云多波束换能器坐标系下坐标为,坐标分量分别为:
52、,;
53、;
54、将点云坐标由多波束换能器坐标系转换为地心地固坐标系:
55、;式中,为经纬度旋转矩阵,为姿态旋转矩阵。
56、相对比现有技术,本发明具有以下有益效果:当多波束测深系统无法实时获取声速剖面造成海底地形存在较大误差影响时,所提出的多探头多波束的实时声线弯曲改正方法,可以利用多探头获取的多个波束条带间的重叠条带水深应相同的约束条件,将等效声速梯度作为未知参数进行非线性迭代解算,实现了精度高的实时声线弯曲改正和准确波束归位计算。
技术特征:
1.一种多探头多波束的实时声线弯曲改正方法,其特征在于,包括:
2.根据权利要求1所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s1包括:
3.根据权利要求2所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s2包括:
4.根据权利要求3所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s3包括,s3.1.利用多个波束条带间的重叠条带水深相同的约束条件,对第个和第个接收换能器的重叠条带的点云进行阶多项式拟合:
5.根据权利要求4所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s3包括,s3.2.1.存在一个等效声速梯度使得重叠条带水深拟合结果的方差最小,构建等效声速声线跟踪方程:
6.根据权利要求5所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s3包括,s3.2.2.在重叠条带的拟合方差最小的情况下有:
7.根据权利要求6所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s3包括,s3.2.3.进行迭代解算得到拟合方差最小情况下的等效声速梯度估计值:
8.根据权利要求7所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s3包括,s3.2.4.将代入:
9.根据权利要求8所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s4包括,s4.1.利用改正后等效声速梯度估计值,对第i个换能器的第j个波束进行准确的声线弯曲改正,波束的侧向距和垂向距为:
10.根据权利要求9所述的一种多探头多波束的实时声线弯曲改正方法,其特征在于,s4包括,s4.2.计算得到点云多波束换能器坐标系下坐标为,坐标分量分别为:
技术总结
本发明公开一种多探头多波束的实时声线弯曲改正方法,属于声线修正技术领域,用于多波束的声线改正,包括对多波束信号发射换能器、多波束信号接收换能器相对于载体坐标系的位置关系进行校准,记录往返信号的传播时间和返回信号的入射角度,采用常声速值进行初步的声线弯曲改正和波束归位计算;利用多个波束条带间的重叠条带水深相同的约束条件,将等效声速梯度作为未知参数进行非线性迭代解算;将解算得到的等效声速梯度重新用于声线弯曲改正和波束归位计算,获得观测历元下最终的多波束测深点。本发明将等效声速梯度作为未知参数进行非线性迭代解算,实现了精度高的实时声线弯曲改正和准确波束归位计算。
技术研发人员:辛明真,李敏泽,阳凡林,刘金朋,吴妞妞,赵显庆
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!