一种AUV实时风险评估系统及方法
本发明涉及自主水下潜器,具体涉及一种auv实时风险评估系统及方法。
背景技术:
1、配备内置计算机系统的auv(自主式水下潜器)具有在水下独立工作的能力,其续航时间长、效率高、测量范围广,在海洋科考、海洋资源勘探、环境监测和军事等领域有着广泛的应用。在最近的研究中,auv的运营转向极地、岩石海岸、大陆冰架下等非良性环境,然而与开放水域相比,在如此极端的环境下运行,不可避免地会对auv本身和现场运营团队构成更高的风险。例如海冰在auv回收或运行过程中造成碰撞风险;此外,海冰可能会损坏天线或螺旋桨叶片等部件,或使auv壳体破裂并导致泄漏;auv通信性能还会受到冰浓度和厚度的影响,因此auv在冰层下接收信号的能力降低,通信不畅又会增加auv定位的难度。auv的可靠性和安全性面临严重挑战,相关运营风险也大幅增加。由此可见,对auv进行有效的风险评估,进而确保auv的安全至关重要。
2、目前,针对auv的风险评估主要依赖于基于历史数据和专家经验在auv任务前或任务后将auv风险量化,并给出合理故障预防和维修建议,利用有限资源达到有效减少风险的目的。但auv风险具有动态性、耦合性、相关性和冗余性的特征,对其风险的评估存在不同的要求和条件。此外,尽管风险评估已在车辆工程、航空航天、医疗、石油等领域得到了广泛应用,但针对auv的风险评估仍然较少,同时缺乏auv运行全过程的实时风险评估系统。
3、因此,现需要一种针对auv的实时风险评估系统及方法。
技术实现思路
1、本发明的主要目的在于提供一种auv实时风险评估系统及方法,以解决现有技术中不能进行auv实时风险评估的问题。
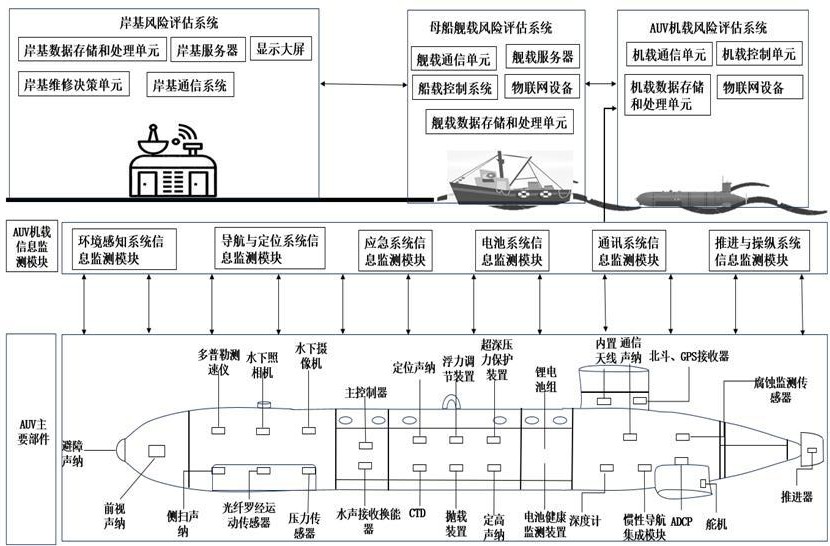
2、为实现上述目的,本发明提供了一种auv实时风险评估系统,包括:auv部件、auv机载信息监测系统、auv机载风险评估系统、岸基风险评估系统和母船舰载风险评估系统;auv机载信息监测系统采集auv部件的运行数据,并将数据上传到auv机载风险评估系统、岸基风险评估系统和母船舰载风险评估系统,进行风险评估。
3、进一步地,auv机载信息监测系统包括:环境感知系统信息监测模块、导航与定位系统信息监测模块、应急系统信息监测模块、电池系统信息监测模块、通讯系统信息监测模块和推进与操纵系统信息监测模块。
4、进一步地,auv机载风险评估系统包括:机载通信单元、机载控制单元、机载数据存储和处理单元和物联网设备;其中auv 机载信息监测系统将数据传递到机载数据存储和处理单元,机载数据存储和处理单元与机载通信单元和物联网设备连接,以实现数据传递,物联网设备和机载通信单元连接,机载控制单元与物联网设备和机载通信单元连接。
5、进一步地,岸基风险评估系统包括:岸基数据存储处理单元、岸基服务器、显示大屏、岸基维修决策单元和岸基通信系统;岸基数据存储处理单元用于采集、存储和初步处理来自auv和母船的数据;岸基服务器与岸基数据存储单元连接,整合和分析来自数据存储单元的数据;显示大屏与岸基服务器和岸基维修决策单元相连;岸基维修决策单元与岸基服务器、岸基通信系统相连;岸基通信系统与岸基服务器相连,岸基服务器通过岸基通信系统向母船和auv 发送指令,并接收auv 状态数据。
6、进一步地,母船舰载风险评估系统包括:舰载通信单元、舰载服务器、船载控制系统、物联网设备和舰载数据存储处理单元;载服务器连接舰载通信单元,以便与外部通信,同时连接到舰载数据存储处理单元,以获取和存储数据;舰载数据存储处理单元与舰载服务器、船载控制系统和物联网设备连接;船载控制系统与舰载服务器和数据存储单元交换数据,并与物联网设备进行通信。
7、本发明还提供一种auv实时风险评估方法,具体包括如下步骤:
8、s1,通过auv 机载信息监测系统获取auv部件的状态数据、位置和导航数据和环境数据。
9、s2,通过岸基、舰载和机载数据处理和存储单元对auv机载信息监测系统收集到的原始数据进行清洗、降噪、校正和标准化预处理操作。
10、s3,基于云模型和cbn算法建立auv 风险评估模型,对auv 实时状态进行评估和预警。
11、进一步地,步骤s3中云模型的建模过程具体包括如下步骤:
12、s31.1,依据auv机载信息监测系统采集的数据,构建对应因素论域;
13、其中,代表监测数据。
14、s31.2,采用正向云发生器算法,获得云滴的分布及其在论域空间中的位置,同时得到每个云滴所代表的概念的隶属度。
15、进一步地,步骤s31.2具体包括如下步骤:
16、s31.2.1,生成期望值为,方差为的正态随机数,记作。
17、s31.2.2,生成期望值为,方差为 的一个的正态随机数,记作。
18、s31.2.3,计算该云滴的隶属度。
19、s31.2.4,生成的即为云滴论域空间中的位置。
20、s31.2.5,重复s3.2.1- s3.2.5,直到产生n个云滴后停止。
21、进一步地,步骤s3中cbn建模流程具体包括如下步骤:
22、s32.1,选取auv机载信息监测模块采集到的auv 实时状态数据和先验知识中的auv 历史故障数据作为copula 模型的样本数据。
23、s32.2,采用赤池信息量准则识别基于可视化网络bn中的风险因素的最佳拟合边缘分布函数,的值根据似然原理计算:
24、;
25、其中,x表示变量,k表示变量维度,p, q分别为与相关的分布参数;分别表示边缘分布函数的均值和方差。
26、s32.3,通过分部积分法将样本数据转换为每个风险因素在[0,1]范围内的均匀分布,实现copula 建模,copula 参数 作为变量依赖性度量,通过定义kendall 秩相关系数来确定;
27、;
28、;
29、分别表示两个不同的变量节点, 分别为与相关的分布参数。
30、s32.4,计算所有的相关性测度kendall 秩相关系数,其次再计算每个变量的kendall 秩相关系数之和,将对应最大kendall 秩相关系数之和的变量记作第一根节点,记为,同时对kendall 秩相关系数过小的变量予以剔除,将剩余变量组成子节点和根节点组合在一起,再计算剩下变量的kendall 秩相关系数之和,找到第二根节点,记为,重复步骤s32.3,直至搭建出copula 结构。
31、每个变量的kendall秩相关系数之和的计算公式:
32、。
33、s32.5,将步骤s32.4 中建立的copula结构作为贝叶斯网络的dag 结构,在网络结构的基础上根据极大似然估计法计算各变量的条件概率表,将条件概率表代入贝叶斯网络模型,完成cbn模型的构建。
34、进一步地,步骤s32.5具体包括如下步骤:
35、s32.5.1,在贝叶斯网络节点中变量通常为离散变量,设,其中分别代表贝叶斯网络节点,分别代表贝叶斯网络节点概率的取值,则似然函数写为:
36、 。
37、式中:;其中,记录了样本数据中发生的次数,代表极大似然估计的参数;代表样本数据的集合。
38、s32.5.2,通过拉格朗日乘数法算出的极大似然估计为:
39、;
40、采用kendall秩相关系数计算2个节点之间的相关性,再根据事件之间的因果逻辑,判断各个因素间的有向边方向,引入先验知识,如auv 历史故障数据和专家知识,将各节点的分布函数输入dag中,完成cbn 模型构建。
41、本发明具有如下有益效果:
42、本发明基于多传感器和物联网技术,采集auv 布放、下潜、作业、上浮和回收全任务剖面的方位、设备性能、环境数据。利用云模型实现auv 水下环境和系统组件的不确定性建模,有助于对auv 系统和任务的风险进行更为全面细致的考虑。这有助于提高风险评估的准确性,并为执行合理的决策和采取风险管理措施提供更全面的信息。利用兼具copula函数和传统贝叶斯网络优点的copula-贝叶斯网络模型,在考虑风险因素之间复杂关系的同时,有效运用概率推理和网络分析,提高对auv系统风险的全面理解,从而准确合理地评估auv 全任务剖面的风险。并持续实时输出auv 风险评估结果和评估报告,为auv 全任务剖面的风险评估提供信息化支撑,具有全面性、实时性和经济性,显著提升了auv 运营管理的效率。
- 还没有人留言评论。精彩留言会获得点赞!